



adams仿真二自由度機(jī)械臂逆動(dòng)力學(xué)求解問題?
ADAMS逆動(dòng)力學(xué)求解,最后得出的軌跡跟預(yù)期軌跡相差很大,力矩加的位置都加在了關(guān)節(jié)處,是哪里出問題了呢,有沒有大佬知道問題處在了哪里?
2331 1
?_7733 ??? 1年前
六軸碼垛機(jī)器人admas正逆運(yùn)動(dòng)學(xué)仿真 
圖5-11 導(dǎo)入ADAMS的部件選擇 圖5-12 導(dǎo)入ADAMS的樣機(jī)模型 5.4 機(jī)器人運(yùn)動(dòng)學(xué)仿真 5.4.1 軌跡規(guī)劃 軌跡規(guī)劃即為求解機(jī)器人運(yùn)動(dòng)學(xué)逆解的過程。將機(jī)器人模型導(dǎo)入ADAMS后,首先是為機(jī)器人添加材料,本機(jī)器人結(jié)構(gòu)為鋁合金。
2373
余俊煒 ??? 3年前
基于ADAMS的點(diǎn)按手法運(yùn)動(dòng)仿真 
反之,當(dāng)給定了機(jī)器人手臂的末端軌跡,反解出關(guān)節(jié)角θi。機(jī)器人手臂的正、逆運(yùn)動(dòng)學(xué)計(jì)算是比較復(fù)雜的,可以借助MATLAB進(jìn)行計(jì)算。1.4 在ADAMS定義相關(guān)參數(shù)在ADAMS環(huán)境下,首先定義各個(gè)部件的質(zhì)量屬性,然后定義模型各種約束,為仿真做準(zhǔn)備。
3012 2
擺渡人張 ??? 2年前
案例55-帶圓盤轉(zhuǎn)子風(fēng)機(jī)葉片的反求分析 
主要目標(biāo)是使用逆解從給定的熱幾何體獲得冷幾何體(用于制造)。 為了驗(yàn)證逆解分析結(jié)果,對(duì)冷幾何體(通過逆解獲得)進(jìn)行標(biāo)準(zhǔn)正解分析,以完成結(jié)果比較的回路測(cè)試。 為了突出Mechanical APDL逆解技術(shù),本示例問題不涉及循環(huán)對(duì)稱性分析。
2704 7 1
龍飛宇 ??? 3年前
案例分享 | Adams轉(zhuǎn)鼓臺(tái)架2D_drum路面應(yīng)用 
上述參數(shù)中,需要注意的是: Diameter是轉(zhuǎn)鼓半徑,一般用轉(zhuǎn)鼓外柱面時(shí)需要設(shè)為負(fù)值,正值為內(nèi)柱面; V表示柱面線速度,正負(fù)與內(nèi)外柱面的選擇有關(guān),比如,外柱面且速度為正時(shí),表示逆時(shí)針轉(zhuǎn)動(dòng); cleat系列參數(shù)表示了轉(zhuǎn)鼓上的橫擋激勵(lì),個(gè)數(shù),方向等,本次仿真不考慮橫擋,設(shè)為0個(gè); Acceleration_time,表示從0到指定轉(zhuǎn)速所需的時(shí)間
4366 1 1
擺渡人張 ??? 2年前
ADAMS的發(fā)展史
Calahan教授也告訴我他預(yù)感會(huì)有機(jī)械系統(tǒng)的分析程序,其中不會(huì)用到矩陣逆運(yùn)算或矩陣乘法,因?yàn)檫@些需要太多的計(jì)算操作,耗時(shí)低效。他告訴我避免與0相乘,因?yàn)檫@個(gè)需要的計(jì)算資源與兩個(gè)非零數(shù)相乘一樣。這些讓我認(rèn)識(shí)到數(shù)值效率的重要性。因此我選擇了隱式后向差分法,也叫Gear 算法。主要還是考慮到此方法的數(shù)值穩(wěn)定性,并且也能夠解決數(shù)值剛性問題,盡管數(shù)值剛性的系統(tǒng)很少。
3043 23 13
peaky ??? 3年前
adams動(dòng)力學(xué)仿真靜止?fàn)顟B(tài)下,兩個(gè)堆疊物體為什么會(huì)相對(duì)滑動(dòng)?
adams不設(shè)置外力,僅設(shè)置重力,兩個(gè)物體堆疊,理論來說接觸摩擦力為0。然而adams仿真結(jié)果,若接觸的地方為圓面和平面接觸,例如輪胎與地面,則相對(duì)滑動(dòng)在0附近微小波動(dòng),屬于正常現(xiàn)象。但兩個(gè)物體的接觸為兩個(gè)平面接觸,則隨著仿真時(shí)間的繼續(xù),相對(duì)滑動(dòng)摩成線性增長(zhǎng)。這是怎么回事,怎么解
3465 1
用戶_67366 ??? 11月前
設(shè)計(jì)仿真 | 應(yīng)用Adams/vibration模塊分析整車剛體模態(tài) 
Adams/Vibration首先對(duì)系統(tǒng)進(jìn)行線性化分析,計(jì)算特征值和特征向量,然后計(jì)算在強(qiáng)迫激勵(lì)作用下的傳遞函數(shù)和功率譜密度函數(shù)等頻域特性,這一過程非常快捷,可以得到頻域的精確解。同時(shí)可以考慮系統(tǒng)中液壓和控制對(duì)整個(gè)系統(tǒng)的影響。
2911
海克斯康設(shè)計(jì)與仿真 ??? 2年前
Isight集成ADAMS/CAR進(jìn)行多工況聯(lián)合參數(shù)優(yōu)化實(shí)例 
使用工具版本SIMULIA2023、ADAMS2024.2 前期對(duì)Isight調(diào)用ADAMS/CAR模塊所需的simcode文件的生成進(jìn)行了說明。但未進(jìn)行實(shí)際案例的提供。 近期在工作實(shí)際中,遇到某款車型,在選定懸架系統(tǒng),轉(zhuǎn)向器型號(hào)后,轉(zhuǎn)向角及轉(zhuǎn)向特性匹配困難的實(shí)際問題。額外,轉(zhuǎn)向特性特性一般耦合前束角變化特性,因此需要多工況耦合尋解。
2325 1
歡樂多??π ??? 9月前
基于Adams的六足直立式步行機(jī)器人運(yùn)動(dòng)仿真分析 
最后,根據(jù)電機(jī)25 r∕min 的轉(zhuǎn)速,給曲柄lOF 施加一個(gè)運(yùn)動(dòng),使其以ω=150(°)∕s 逆時(shí)針方向轉(zhuǎn)動(dòng)。至此,中間步行腿機(jī)構(gòu)模型構(gòu)建完畢,如圖4所示。
4180 7 8
仿真客 ??? 3年前
設(shè)計(jì)仿真 | 馬恒達(dá)使用Adams與ODYSSEE機(jī)器學(xué)習(xí)構(gòu)建頻率相關(guān)阻尼器準(zhǔn)確預(yù)測(cè)行駛和操縱性能 
為了實(shí)現(xiàn)這一目標(biāo),需要采用neighbours=3,power=2的逆動(dòng)力學(xué)求解器。我們使用ODYSSEE與Quasar Embedded的集成以及MATLAB Simulink進(jìn)行ML/AI模型開發(fā)。然后,我們比較了兩種ML/AI方法的結(jié)果。總試驗(yàn)數(shù)據(jù)的80%用于模型的開發(fā)和訓(xùn)練。剩下的20%用于開發(fā)模型的測(cè)試和驗(yàn)證。逆動(dòng)力學(xué)模型顯示了FSD阻尼器系統(tǒng)性能預(yù)測(cè)的期望精度。
2455
海克斯康設(shè)計(jì)與仿真 ??? 1年前
案例 | 運(yùn)用ADAMS實(shí)時(shí)減少物理樣機(jī) 
-模型設(shè)置 模型準(zhǔn)備好集成到測(cè)試臺(tái)中,這項(xiàng)工作包括創(chuàng)建 I/O 通道、調(diào)整 RT 解算器設(shè)置和生成 FMU,符合FMI 協(xié)同仿真標(biāo)準(zhǔn)的模型表示方法。 -與 HIL 測(cè)試臺(tái)集成 FMU 隨后被移植到 HIL 平臺(tái)上,并在執(zhí)行硬件調(diào)整之前對(duì)模型進(jìn)行校準(zhǔn)以測(cè)試數(shù)據(jù)。
2179
Cruise ??? 3年前
單位脈沖函數(shù)及卷積(杜哈梅積分)——從常微分方程的解出發(fā)理解 
但是直接求一個(gè)系統(tǒng)的脈沖響應(yīng)不那么容易,往往借助拉普拉斯變換及其逆變換,才能表示出系統(tǒng)的脈沖響應(yīng)。單位脈沖激勵(lì)能有這個(gè)應(yīng)用,在于其自身的拉氏變換為常數(shù)1,所以系統(tǒng)脈沖響應(yīng)的拉氏變換就是系統(tǒng)的傳遞函數(shù),在時(shí)域用脈沖響應(yīng)評(píng)價(jià)系統(tǒng),相當(dāng)于直接評(píng)價(jià)系統(tǒng)的傳遞函數(shù)。當(dāng)然,這是后話,后續(xù)筆者擬總結(jié)一下拉氏變換。在信號(hào)與系統(tǒng)中,單位脈沖函數(shù)的最大的作用是引出了卷積積分的定義。
3692
數(shù)峰青 ??? 1年前
PINN求解一維波動(dòng)方程,pytorch框架,附代碼(二) 
原始采樣點(diǎn)損失函數(shù)變化真實(shí)結(jié)果、預(yù)測(cè)結(jié)果、絕對(duì)誤差逆問題逆問題是已知一些觀測(cè)數(shù)據(jù),但是不確定方程中的一些系數(shù)是多少,目標(biāo)是利用這些觀測(cè)數(shù)據(jù)來反推出方程中的系數(shù)。更進(jìn)一步,有大量的觀測(cè)數(shù)據(jù),但是不知道方程的具體形式,利用已有數(shù)據(jù)來推出方程的表達(dá)式,因此逆問題可能不具備適定性,求解更困難。
2227 1 1
晶體塑性有限元 ??? 7月前
技術(shù)分享 | Simcenter 3D接觸粘接與解算方案 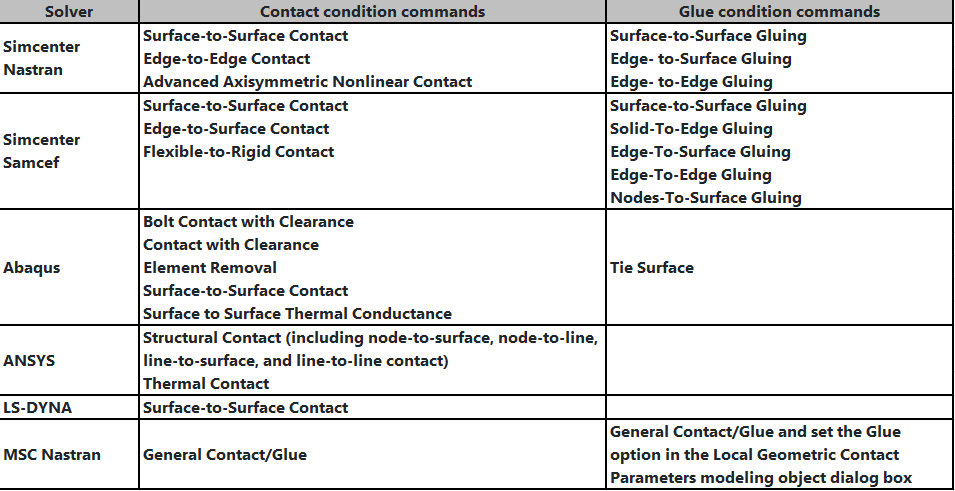
還允許您將模態(tài)數(shù)據(jù)直接導(dǎo)出到RecurDyn和Adams多體動(dòng)力學(xué)軟件。
2872 1
仿真客 ??? 3年前
CFD學(xué)習(xí):使用有限差分法求解泊松方程 
有限差分法 由于泊松方程僅適用于少數(shù)簡(jiǎn)單的工程模型,因此采用計(jì)算算法來獲得近似數(shù)值解。在數(shù)值技術(shù)中,有限差分法是求解泊松方程最古老、最簡(jiǎn)單、最直接的方法。 有限差分法將偏微分方程轉(zhuǎn)換為一組線性方程,并使用矩陣求逆來求解它們。在 FDM 中,偏微分方程直接從連續(xù)函數(shù)和算子轉(zhuǎn)換為離散采樣對(duì)應(yīng)項(xiàng)。FDM的精度與有限網(wǎng)格逼近連續(xù)函數(shù)的能力有關(guān)。
2944 1
Cadence CFD學(xué)習(xí) ??? 2年前
漢航NTS.LAB Link 結(jié)構(gòu)動(dòng)力修改之逆向修改SDM 
公式(8)中Wp可表示為 對(duì)公式(8)中的變化量?p求偏導(dǎo),以求目標(biāo)函數(shù)的極小值,解得: 當(dāng)待修改參數(shù)靈敏度不高的數(shù)量越多或STWeS條件數(shù)越大時(shí),要求λ2取值越大。通過上式求得第k次變化量?pk修改新的待修改參數(shù): 1.3 結(jié)構(gòu)動(dòng)力修改逆問題與模型修正的區(qū)別 結(jié)構(gòu)動(dòng)力修改逆問題與模型修正的求解都涉及靈敏度分析和參數(shù)迭代求解算法,但兩者有者本質(zhì)的不同。
2367
漢航 ??? 4月前
多體動(dòng)力學(xué)歷史的重要一頁 
稀疏矩陣配合廣義坐標(biāo)分解,并不需要對(duì)雅克比矩陣求逆,奠定了另外一款軟件DADS(Dynamic Analysis and Design System)。Wehage在愛荷華大學(xué)當(dāng)助力教授,后來去了TARDEC,1995年,又加入了卡特彼勒。
2813 24 21
peaky ??? 3年前
何為地質(zhì)構(gòu)造?典型地質(zhì)構(gòu)造圖文分析 
對(duì)象:巖石(建造) 動(dòng)力:內(nèi)、外動(dòng)力 產(chǎn)物:褶皺、解理、斷層、劈理等研究構(gòu)造的實(shí)踐意義——與國(guó)民經(jīng)濟(jì)建設(shè)息息相關(guān)1、礦產(chǎn)的形成和分布是受一定的地質(zhì)構(gòu)造控制。
6035 1 1
地質(zhì)GIS帝國(guó) ??? 3年前
機(jī)械臂B樣條插補(bǔ)軌跡規(guī)劃 
[-60.865,-12.697,-69.496,-7.8067,90,119.13]/180*pi*0;RPY=deg2rad([180,0,-90]);[X,Y,Z]=deal(zeros(1,Cunt));for i=1:Cunt% if i==1% FK = Pos2Tr_XYZ([T(i,:),RPY]);% %自己編寫求逆解的函數(shù)
2121
余俊煒 ??? 3年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
