



光刻技術(shù)第7期 | 二維與三維矢量成像模型對(duì)比-零波像差雙遠(yuǎn)心成像 
因此,成像模型中各級(jí)次衍射光在物方和像方的i-j坐標(biāo)系,與光線追跡中對(duì)應(yīng)光線的i-j坐標(biāo)系相同,即Oo與To、Oi與Ti相等,三維矢量成像模型和二維矢量成像模型仿真結(jié)果相同。03/先進(jìn)技術(shù)與未來(lái)發(fā)展方向1. 先進(jìn)制程與新光源適配升級(jí)面向3nm及以下節(jié)點(diǎn),開(kāi)發(fā)EUV光刻雙遠(yuǎn)心物鏡適配的三維矢量模型,深化極紫外光與遠(yuǎn)心偏振光路的耦合作用機(jī)制研究。
1937
武漢二元 ??? 5月前
光刻技術(shù)第5期 | 二維矢量光刻成像 
網(wǎng)格化的瓊斯光瞳獲取方法示意圖5.局部與全局坐標(biāo)系的變換二維矢量成像模型假設(shè)入瞳面和出瞳面之間各級(jí)衍射光的傳播方向與光軸平行,若光軸方向?yàn)閦軸,瓊斯光瞳建立在與z軸垂直的i?j坐標(biāo)系。準(zhǔn)確仿真像面成像結(jié)果需要出瞳面處x?y?z坐標(biāo)系下的三維偏振矢量,所以二維矢量成像模型在出瞳面處將偏振態(tài)從二維i?j坐標(biāo)系轉(zhuǎn)換到三維x?y?z坐標(biāo)系。
2336
武漢二元 ??? 5月前
光刻技術(shù)第6期 | 三維嚴(yán)格矢量光刻成像 
03/三維矢量成像模型中的三維偏振像差在三維矢量成像模型中,光學(xué)系統(tǒng)入瞳面到出瞳面之間各級(jí)衍射光偏振態(tài)的變化可用的三維偏振追跡矩陣描述。 物鏡光瞳面上所有坐標(biāo)點(diǎn)的三維偏振追跡矩陣組成三維偏振像差,可通過(guò)光線追跡程序獲取。三維偏振像差獲取程序?qū)⒄麄€(gè)光瞳離散為網(wǎng)格點(diǎn),追跡得到所有網(wǎng)格點(diǎn)對(duì)應(yīng)光瞳坐標(biāo)點(diǎn)的三維偏振追跡矩陣。
2568
武漢二元 ??? 5月前
GIS中分辨坐標(biāo)系是幾度分帶,坐標(biāo)有沒(méi)有帶號(hào)?及添加或去除帶號(hào) 
工作中經(jīng)常會(huì)遇到某些矢量是具有帶號(hào)的,那么如何去除矢量帶號(hào)呢?
3719
巖土聯(lián)盟 ??? 4年前
NURBS參數(shù)空間與坐標(biāo)空間的轉(zhuǎn)化 
參考文獻(xiàn):NURBS自由曲面在光機(jī)設(shè)計(jì)和分析中的應(yīng)用The NURBS Book 2nd迭代算法1:距離矢量算法:首先,建立已知的空間坐標(biāo)(x,y)和待求的參數(shù)空間坐標(biāo)S(u,v)之間的距離矢量公式如下:當(dāng)距離矢量 r 取得最小值時(shí),r 和 NURBS 曲面在參數(shù)坐標(biāo)所決定的空間點(diǎn)處的切向量的點(diǎn)積應(yīng)為零采用牛頓迭代算法求解方程組,對(duì)上式兩端進(jìn)行偏微分
2429 1
普惠仿真 ??? 3年前
FRED應(yīng)用:數(shù)字化極坐標(biāo)數(shù)據(jù)取樣 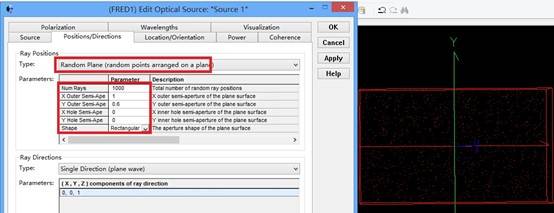
極坐標(biāo)角開(kāi)始于極軸并朝方位角軸正向增加。方位角開(kāi)始于方位角軸,延伸到與極化和方位角方向矢量定義平面相垂直的面。極矢量和方位角矢量的叉乘確定了方位角的正向方向。極矢量(0,0,1)和方位角矢量(1,0,0)的例子如下圖所示。步驟3:數(shù)字化極坐標(biāo)圖數(shù)據(jù)為了從極坐標(biāo)圖中數(shù)字化取樣數(shù)據(jù)到光線方向規(guī)格表中,我們可以在電子表格區(qū)域右鍵點(diǎn)擊鼠標(biāo),在列表菜單里選擇“數(shù)字化曲線”。
1049
信光嗎 ??? 1月前
數(shù)字化極坐標(biāo)數(shù)據(jù)取樣 
極坐標(biāo)角開(kāi)始于極軸并朝方位角軸正向增加。方位角開(kāi)始于方位角軸,延伸到與極化和方位角方向矢量定義平面相垂直的面。極矢量和方位角矢量的叉乘確定了方位角的正向方向。極矢量(0,0,1)和方位角矢量(1,0,0)的例子如下圖所示。
2269 3
追光ing ??? 3年前
ArcGIS中影像糾偏配準(zhǔn)和轉(zhuǎn)坐標(biāo)系 
(4)根據(jù)標(biāo)準(zhǔn)影像或者shp,建立參照點(diǎn)先建立一個(gè)參照點(diǎn)的矢量數(shù)據(jù)然后根據(jù)標(biāo)準(zhǔn)影像,添加幾個(gè)具有參考價(jià)值的參考點(diǎn),之后才能根據(jù)參考點(diǎn)移動(dòng)需要糾偏的影像,注意,這個(gè)參考點(diǎn)間表的時(shí)候選擇的坐標(biāo)系應(yīng)該與標(biāo)準(zhǔn)影像的坐標(biāo)系一致。
2706
地質(zhì)GIS帝國(guó) ??? 3年前
FRED應(yīng)用:數(shù)字化極坐標(biāo)數(shù)據(jù)取樣 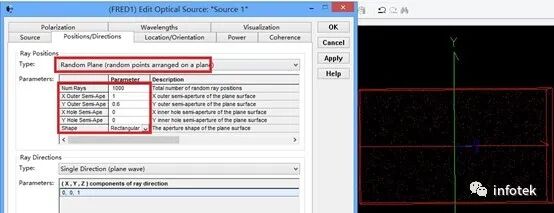
極坐標(biāo)角開(kāi)始于極軸并朝方位角軸正向增加。方位角開(kāi)始于方位角軸,延伸到與極化和方位角方向矢量定義平面相垂直的面。極矢量和方位角矢量的叉乘確定了方位角的正向方向。極矢量(0,0,1)和方位角矢量(1,0,0)的例子如下圖所示。步驟3:數(shù)字化極坐標(biāo)圖數(shù)據(jù)為了從極坐標(biāo)圖中數(shù)字化取樣數(shù)據(jù)到光線方向規(guī)格表中,我們可以在電子表格區(qū)域右鍵點(diǎn)擊鼠標(biāo),在列表菜單里選擇“數(shù)字化曲線”。
2099
追光ing ??? 11月前
COMSOL 中定義材料各向異性的方法 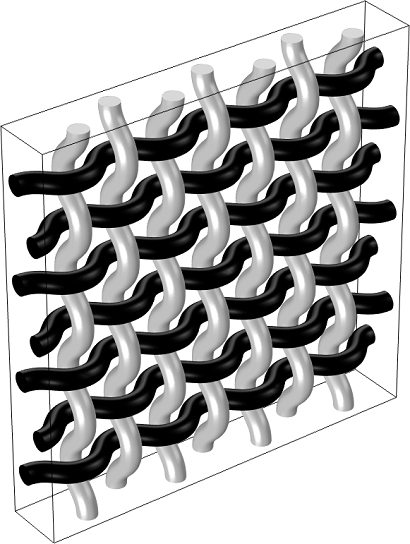
第二個(gè)矢量場(chǎng)可以手動(dòng)指定,笛卡爾坐標(biāo)通常是一個(gè)不錯(cuò)的選擇。以此為起點(diǎn),我們重建第二基矢 ,確保它與 垂直,并被歸一化處理。最后,這兩個(gè)矢量的叉積得到第三基矢 。在軟件內(nèi)部,使用直角坐標(biāo)系 進(jìn)行計(jì)算,并將所有涉及不同坐標(biāo)系的量轉(zhuǎn)換到 坐標(biāo)系。任意坐標(biāo)系中,由矢量 給出的方向總是可以轉(zhuǎn)換為笛卡爾坐標(biāo),如下所示: 式中, 是變換矩陣。
3872 3
學(xué)時(shí)習(xí) ??? 2年前
永磁同步電機(jī)降階模型抽取和矢量控制算法仿真 
6 矢量控制算法仿真 矢量控制亦稱磁場(chǎng)定向控制(FOC),其基本思路是:通過(guò)坐標(biāo)變換實(shí)現(xiàn)模擬直流電機(jī)的控制方法來(lái)對(duì)永磁同步電機(jī)進(jìn)行控制,其實(shí)現(xiàn)步驟如下: 1)根據(jù)磁勢(shì)和功率不變的原則通過(guò)正交變換,將三相靜止坐標(biāo)變換成二相靜止坐標(biāo),也就是 Clark變換,將三相的電流先轉(zhuǎn)變到靜止坐標(biāo)系,再通過(guò)旋轉(zhuǎn)變換將二相靜止坐標(biāo)變成二相旋轉(zhuǎn)坐標(biāo),也就是 Park變換,Park變換中定子電流矢量被分解成按轉(zhuǎn)子磁場(chǎng)定向的
3268 1
TomZ ??? 4年前
光刻技術(shù)第4期 | 光刻成像理論 
它在局部坐標(biāo)系和全局坐標(biāo)系下分別構(gòu)建理論框架,局部坐標(biāo)系以單個(gè)圖形單元為原點(diǎn),可簡(jiǎn)化局部光場(chǎng)計(jì)算,實(shí)現(xiàn)單個(gè)圖形 CD 均勻性與邊緣精度的精細(xì)優(yōu)化;全局坐標(biāo)系以整個(gè)曝光視場(chǎng)為基準(zhǔn),能分析全視場(chǎng)偏振像差的空間分布差異,實(shí)現(xiàn)全視場(chǎng)二維圖形成像均勻性的全局優(yōu)化。三維嚴(yán)格矢量光刻成像模型主要針對(duì)3D集成電路(如3DNAND、3DIC堆疊)的三維圖形,需解決立體結(jié)構(gòu)對(duì)光場(chǎng)傳播與偏振態(tài)的調(diào)制問(wèn)題。
2356
武漢二元 ??? 6月前
Maxwell繪圖 螺旋線的繪制 
Ps:旋轉(zhuǎn)矢量繪制主要分兩步:首先是法線起始點(diǎn)選擇,可在繪圖區(qū)直接單擊某點(diǎn)或在狀態(tài)欄中鍵入X、Y、Z坐標(biāo)后回車,選擇目標(biāo)終點(diǎn)。
6162 16 8
陳亞明 ??? 1年前
離心式壓縮機(jī)仿真案例 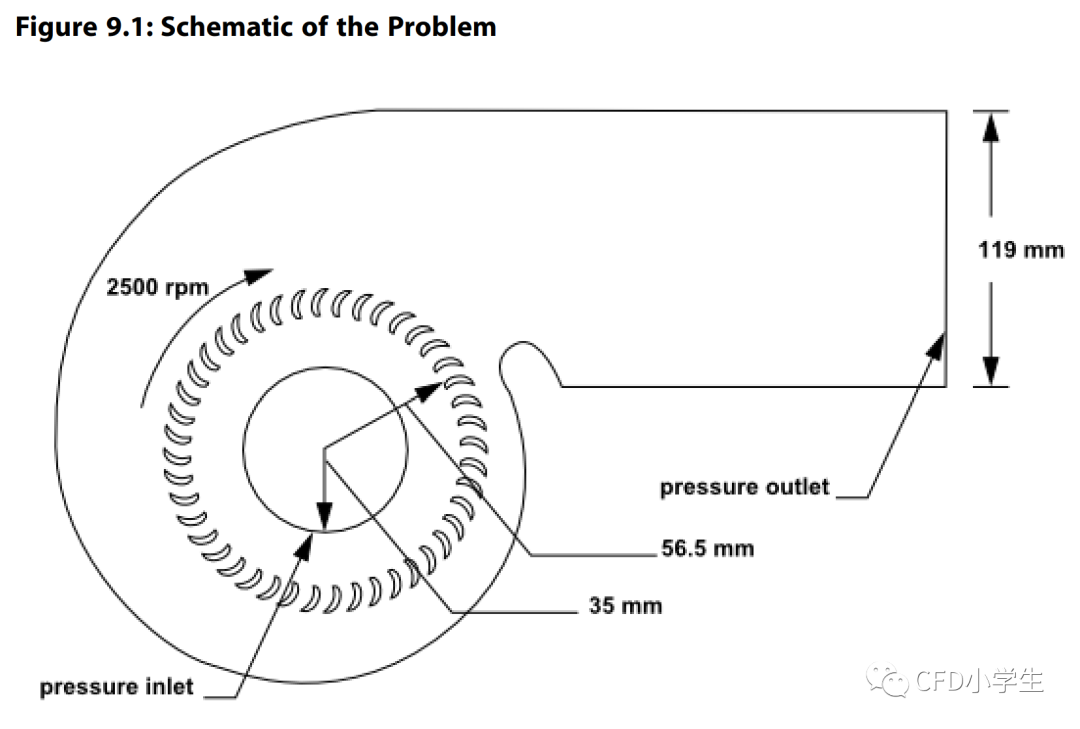
“mesh interface”創(chuàng)建(自動(dòng)配對(duì)、命名并創(chuàng)建成“interior zones”); 3、移動(dòng)參考坐標(biāo)系方程;考慮坐標(biāo)系統(tǒng)以線性速度vt進(jìn)行平移并以角速度ω旋轉(zhuǎn)相對(duì)于靜止參考坐標(biāo)系(stationary/inertial),旋轉(zhuǎn)系統(tǒng)原點(diǎn)位置矢量為r0;旋轉(zhuǎn)軸單位方向矢量a:對(duì)于CFD問(wèn)題中計(jì)算域被定義為與旋轉(zhuǎn)坐標(biāo)相關(guān),計(jì)算域中任一點(diǎn)距離移動(dòng)坐標(biāo)系原點(diǎn)位置矢量為
2788 2 1
我愛(ài)汽輪機(jī)仿真 ??? 2年前
二階反對(duì)稱張量的一點(diǎn)理解 
Orthonormal basis defined by the axial vector[1] 下面我們考慮軸矢量w同某個(gè)新坐標(biāo)系的某個(gè)軸方向重合(如figure 2所示),假設(shè)重合軸為,即,于是 矢量a在新坐標(biāo)系中的表述為 所以 因此 W在新基的三個(gè)方向上的一次投影分量為
3303 11 2
2019100400 ??? 3年前
矢量分析和場(chǎng)論 附矢量分析與場(chǎng)論文檔下載 
無(wú)論選取什么坐標(biāo)系,標(biāo)量的數(shù)值恒保持不變。標(biāo)量間的運(yùn)算遵循一般的代數(shù)法則。 ▎矢量 Vector - Heat and mass fluxes are vectors 又被稱為“向量”。有些物理量physical quantities,是由數(shù)值大小magnitude和方向direction二者共同確定的,這些物理量被稱為“向量”。
2430
每日學(xué)習(xí)分享 ??? 4年前
Maxwell繪圖 等比例放大/縮小和拉伸、掃描 
,然后選擇掃描矢量的終止點(diǎn)坐標(biāo)位置。
6170 19 4
陳亞明 ??? 1年前
十二、梯度和散度--流體力學(xué)理論知識(shí) 
其中分別是柱坐標(biāo)下三個(gè)方向(徑向、切向和軸向)的單位向量</p><p> </p><p><strong>3.
3573
Fluent學(xué)習(xí)筆記 ??? 2年前
VirtualLab偏振分析器 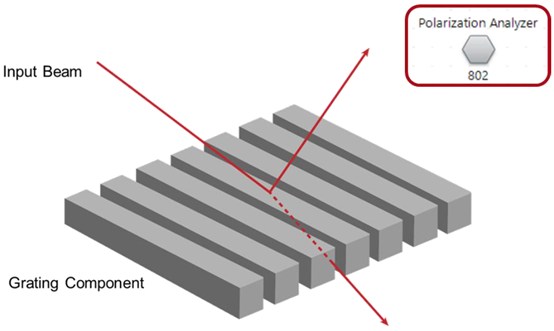
編輯偏振分析器 -入射光束的偏振狀態(tài)可以根據(jù)以下坐標(biāo)系來(lái)定義。a. 光柵的坐標(biāo)系b.光源的坐標(biāo)系c.P-S坐標(biāo)系 d.TE-TM坐標(biāo)系 偏振方向 a.光柵坐標(biāo)系瓊斯矢量分別描述了沿光柵組件的X軸和Y軸的電場(chǎng)。 b.光源坐標(biāo)系 瓊斯矢量分別描述了沿光源X軸和Y軸的電場(chǎng)。
2302
追光ing ??? 1年前
Maxwell繪圖 位置變換與復(fù)制 
【Move】矢量移動(dòng)方法需要在繪圖區(qū)設(shè)定移動(dòng)矢量的起始點(diǎn)何終止點(diǎn)與【Arrange Vector】矢量設(shè)置方法相同,可以看我之前發(fā)的貼子。 2.【Rotate】旋轉(zhuǎn)移動(dòng)方法需要輸入旋轉(zhuǎn)坐標(biāo)軸【Axis】和旋轉(zhuǎn)角度【Angle】,如下圖: 參數(shù)設(shè)置完成后即可完成旋轉(zhuǎn)移動(dòng) 3.
3469
陳亞明 ??? 1年前
20條/頁(yè) 
 12
12 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
