



如何實現局部坐標系跟隨物體一起轉動?
有兩個剛體,一根軸,一個底座,均為軸對稱結構,Y方向為對稱軸 我需要底座首先繞Z軸旋轉一定角度,然后底座和軸各自沿著自己移動后的對稱軸自轉。 我分別設置了局部坐標系,可是自轉時卻是繞著全局坐標系的Y反向旋轉的,請問如何解決呢?
2204 1
齊沂 ??? 3年前
Ansys Zemax | 如何圍繞空間中的任何點旋轉任何元素 
繞透鏡中心旋轉如果我們想讓透鏡圍繞其中心的軸上點傾斜,我們可以使用類似于上面的方法;我們只需要移軸點,旋轉,回到透鏡的前表面。在透鏡后,回到軸點,撤銷傾斜和偏心,并繼續進行其余的光學系統。透鏡系統的3D 布置圖如圖13所示,透鏡2在其中心(點 A 和點 B 的中間位置)繞軸上點傾斜5度。圖 13: 3D 布局圖顯示透鏡2繞透鏡中心的軸上點傾斜。
2635
宇熠科技 ??? 8月前
ADAMS行星齒輪機構運動學及動力學仿真 
齒輪副的建立,齒輪副屬于復合運動副,是兩個運動副之間的運動副,在建立時除了要選擇兩個運動副之外,還需要選擇嚙合點,嚙合點必須是建立在兩個旋轉副公共旋轉構件上的Marker點,Marker點的Z軸方向必須和嚙合方向一致。嚙合點位置和坐標如表所示。
4603 8 1
劉曉東 ??? 2年前
局部坐標系到全局坐標系的轉化?
一種橫觀各向同性材料,在局部坐標系下 x軸垂直于橫觀各向同性面,yoz為橫觀各向同性面,給出局部坐標系下的剛度矩陣,用E1、E2、ν1、ν2、G12表示,E1和ν1為垂直于橫觀各向同性面的彈性模量和泊松比,E2和ν2為平行于橫觀各向同性面的彈性模量和泊松比,G12為剪切模量繞z軸旋轉α角度到全局坐標系,給出旋轉矩陣如果能加微信長期交流,就更好了,有償拜謝
4303 2 3
Summy27 ??? 2年前
comsol中壓電陶瓷仿真學習-邊界設置篇 
按右手定則,先繞Z軸旋轉α角,然后基于新坐標系繞X軸旋轉β角,再基于新坐標系繞Z軸旋轉γ角,即可得到最終的坐標系,這里僅需要輸入β角為pi即可。這里也可以使用基失坐標系,X3軸填-1即可。
4357
CAE備忘錄 ??? 3年前
【6/15更新】一個比較古怪的CAD三維模型,看似簡單,畫對的卻很少,你能嗎? 
,旋轉坐標軸,繞著X軸轉83°9、為了演示方便,已經通過旋轉視圖,改變了坐標圖標方向(實際是物體觀察方向),但是上一步轉的坐標值結果沒有改變。
2039 1 1
技術鄰CAD學習 ??? 3年前
基于ADAMS的點按手法運動仿真 
圖2 機器人手臂中的關節表1 D-H參數表表1中,ai-1指沿Xi軸,從Zi移動到Zi+1的距離;αi-1指繞Xi軸,從Zi旋轉到Zi+1的距離;di指沿Zi軸,從Xi-1移動到Xi的距離;θi指繞Zi軸,從Xi-1旋到Xi的角度。至此完成了機器人手臂的虛擬模型的建立[6]。
3010 2
擺渡人張 ??? 2年前
在 COMSOL 中正確模擬壓電材料 
極化方向沿 x 軸的壓電晶體(右圖)的表示方法與左圖不同,其中 1st 主方向與材料坐標系的 Z 軸一致。使用旋轉坐標系COMSOL Multiphysics 中的“旋轉坐標系”讓您可以使用 Euler 角的 Z-X-Z 約定來指定方向。如果壓電材料的晶體取向或極化方向可以被表示為繞著默認直角坐標系的一次或多次旋轉,那么這項功能就可以提供非常大的幫助。
4065 7
我是小能 ??? 3年前
生產制造 | 產品加工-EDGECAM創建多方向坐標系 
wx_fmt=png&from=appmsg"></p><p>05</p><p>繞 Z 軸逆時針旋轉 90°。
2807
海克斯康設計與仿真 ??? 1年前
三自由度機械臂運動學分析+仿真 
4.關節角0i,:定義為從X i-1旋轉到Xi的角度,繞Zi軸正向旋轉為正。 三、相鄰坐標系之間的齊次變換矩陣 D-h表如下 (2)通過(1)求解出機器人各位姿變換矩陣后,求解機器人手臂變換矩陣。通過matlab 計算,寫出機器人末端位置。
3992
余俊煒 ??? 2年前
Ansys Zemax | 如何使用坐標返回功能 
如果您選擇“無(None)”則會關閉坐標返回功能,除此之外你可以選擇以下三種模式進行坐標返回: 僅方向(Orientation Only):在這種情況下,系統只改變繞X,Y,Z軸的傾斜量來使系統坐標軸方向與所定義表面坐標軸方向一致。
2425 3
宇熠科技 ??? 3年前
有限元理論基礎及Abaqus內部實現方式研究系列40: 梁單元差異(4)-形心、剪心和偏置 
當一個集中力矩移動到另一點時,力矩和扭轉角度都不會變,但繞剪心的旋轉對節點導致截面兩個方向的位移v、w的變換,且顯然與剪心和節點的距離NS有關,具體這個v、w的變換如何影響剛度也可看我們以前梁單元剛度陣的文章。 1.3.2 彎曲的轉動軸彎矩是繞某個軸的旋轉,我們來分析究竟繞過節點還是形心旋轉?
5179 11 6
SnowWave02 ??? 3年前
離心式壓縮機仿真案例 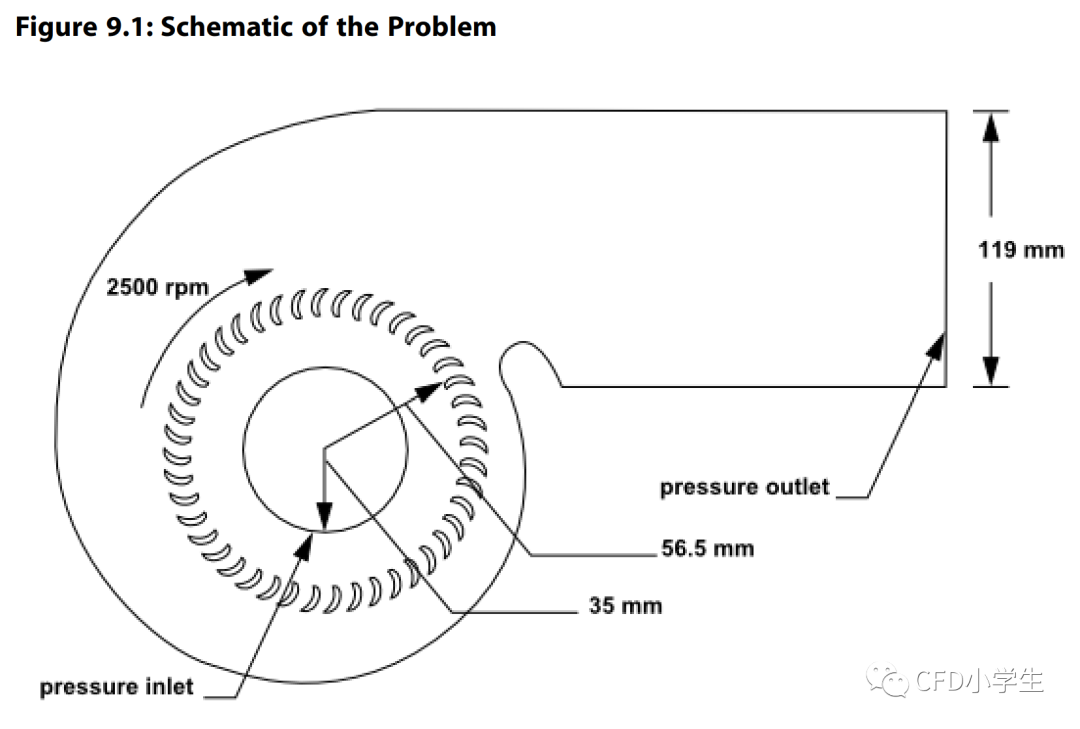
side),使用三個參考坐標系來進行模擬:靜止坐標系應用到槳葉外部區域和兩個分開的移動參考坐標系應用到兩個槳葉區域;三、離心式壓縮機流場仿真關鍵設置2D模型共節點網格劃分;穩態求解,流體材料默認為空氣,標準k-e湍流模型和增強型壁面函數,動域繞z軸正方向順時針旋轉,轉速為2500rpm;自然壓力入口和出口邊界,壓力入口和壓力出口邊界的壓力值均設置為0Pa;
2787 2 1
我愛汽輪機仿真 ??? 2年前
Ansys Zemax|如何使用坐標返回功能恢復原坐標系 
在下圖中,S2和S3處產生了y偏移,這僅僅是因為在S1的坐標系中傳播了一段非零的Z距離(S1繞X軸傾斜了20度)。 圖 2:鏡頭編輯器與三維布局圖。如果要定義S3在物空間坐標系中的位置,可以采取以下幾種方法之一:1、手動計算出由于沿傾斜坐標系傳播z距離而產生的y偏移量,對應地偏心表面。
1215
宇熠科技 ??? 2月前
008. 淺析有限元分析中自由度的概念 
這是因為在三維空間中,質點可以沿著三個彼此垂直的坐標軸(通常是x、y和z軸)移動。空間中的剛體有六個自由度。這是因為一個剛體在三維空間中可以進行平移運動(沿x、y、z軸方向),同時還可以繞這三個軸進行轉動。假設A點位于某條線上,則A點有幾個自由度?假設A點位于某條線上,除了可以在該線上進行平移運動外,還可以繞該線旋轉。
2694
CAE知識手札 ??? 2年前
Workbench LS-DYNA墜落向導新能源電池包墜落過程操作文檔-附講解視頻及模型文件 
進入向導后,右側彈出向導設置模塊和幫助說明,在這可設置模型相對于參照物初始位置和墜落高度,讀者可根據自己實際需求進行設置,本文設置如下,目標旋轉30°,模型繞y軸旋轉30°,墜落高度為1m,然后點擊下一個,就進入到了向導的第二個界面。
3956 15 7
孫一凡仿真 ??? 11月前
lsdyna如何輸出局部坐標系下的動畫d3plot?
k文件定義了繞全局坐標系坐標軸的旋轉,但是輸出的動畫中模型一直在轉動,不方便觀察,目前考慮定義一個局部坐標系,讓其靜止不動,請問這樣可以實現嗎?
3324 5 3
興_6072 ??? 3年前
坐標轉換與參數計算介紹 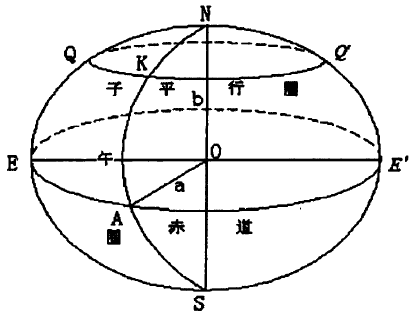
如圖1所示,O為橢球中心,NS是旋轉軸,a是長半軸,b是短半軸。子午面是通過橢球旋轉軸的平面,其與橢球面的交線叫做子午圈;平行圈是橢球面與垂直于旋轉軸的平面截得的圓,這其中經過橢球中心O的平行圈叫做赤道。2、常用坐標表現形式為了表示橢球面上點的位置,必須建立相應的坐標系,選用不同的坐標系,其坐標表現形式也不同。
2676 2
繪夢流光 ??? 3年前
算例丨圓盤類零件的振動模態與動態響應有限元分析 
為模擬圓盤旋轉,在其一端裝一個半徑為70mm、長度為700mm的軸(如圖1所示)。圓盤繞軸轉動,使圓盤頂部上一點全局坐標系的某方向上移動200mm。假設圓盤和軸都是剛體。
3651 2
聲學工程師小吳 ??? 2年前
ANSYS Workbench周期對稱模型的模態分析方法 
確保扇區的兩個邊界(起始面和終止面)與旋轉對稱軸形成的角度為 360°/n(n 為葉片總數)。例如,對于 6 葉片風扇,單個扇區角度為 60°。 定義坐標系,在 DM 中創建全局坐標系,確保 Z 軸與旋轉對稱軸重合(即葉片繞 Z 軸旋轉)。 2.
4341 2 1
大龍貓?? ??? 12月前
20條/頁 
 9
9 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
