



ADAMS履帶小車仿真 
在設計鏈輪之前要確定:齒數z、分度圓直徑d、鏈條滾子直徑d1、節距p等參數,本文取鏈節數為11,節距為9.5。為保證履帶與鏈輪的配合關系,在整條履帶長度為節距的整數倍的前提下,保證履帶的幾何參數。
3373 2
擺渡人張 ??? 2年前
履帶建模常見問題及解決方法-履帶穿透、脫軌、彈飛問題 
履帶仿真時,脫軌了怎么辦?答案:嘗試將把全部輪系的接觸方式都更改為Full search就行2. 仿真空轉履帶模型時,驅動輪運行,但履帶被彈飛了,是什么原因呢?答案:檢查初始位置是否有穿透發生,可以將被彈飛的履帶通過Convertor工具轉化為General Body定義接觸后,查看接觸力的大小。3.
2579
杭州擬創(RecurDyn原廠) ??? 2年前
2024年RecurDyn優秀案例競賽作品分享:核探測機器人底盤設計與越障性能仿真驗證 
其中對履帶板形狀、尺寸的參數定義結果如下所示:履帶板主要尺寸參數信息如下表2-1所示:(2)創建四輪 履帶底盤的創建主要包括四輪一帶,其中履帶通過履帶板來創建,剩下的四輪通過參數化建模來實現,在創建四輪之前要先將懸架模型導入,隨后對輪系位置及尺寸參數進行定義,最后通過Assembly功能生成履帶。
2557
杭州擬創(RecurDyn原廠) ??? 1年前
2023年6月培訓報名 
日期 內容 6/14Track_LM(低速履帶+MFBD分析) 履帶工具包Track_LM/HM適用場景; 低速履帶的結構組成與工作原理; Track_LM工具包建模:驅動輪建模、支重輪建模、導向輪建模、托輪建模、履帶鏈節建模
2259
杭州擬創(RecurDyn原廠) ??? 3年前
RecurDyn成功案例:多履帶式城市偵察機器人虛擬驗證 
▎仿真過程① 快速準確地建立復雜的履帶組件② 定義履帶與樓梯間接觸參數③ 用直觀、簡單的數學表達式定義機器人各部件的運動④ 計算驅動和爬樓梯所需的扭矩,用于確定適當的電機容量▎關鍵仿真技術? 專用UI可快速裝配履帶系統,實現快速建模? 高速計算履帶板和樓梯間接觸的接觸算法? “Function Expression
4330
杭州擬創(RecurDyn原廠) ??? 2年前
履帶建模常見問題及解決方法-履帶翹頭、懸浮、偏軌問題 
履帶車輛在仿真過程中會自動偏離軌跡,是什么原因呢?答案:若履帶車輛經過復雜路面后發生輕微偏離,則屬于正常現象。若平面發生偏離:a) 檢查左右履帶是否對稱,質心是否在車輛的中心位置。b) 檢查鏈輪、導向輪等各個車輪和履帶之間的接觸參數是否合理,如果履帶尺寸比較小,默認的接觸參數會過大導致出現偏離的問題。
2373
杭州擬創(RecurDyn原廠) ??? 2年前
Recurdyn履帶問題 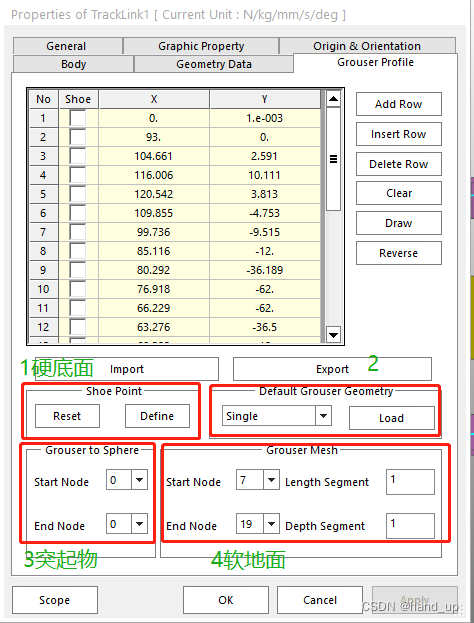
1.問題:整車履帶仿真出錯,車輛越障時遇到障礙物直接彈開思路:關于這類模型需要調節履帶和地面之間的接觸參數、Bushing force,還有驅動函數。
4239 3
CAE仿真學習菌 ??? 2年前
履帶建模常見問題及解決方法-接觸問題 
RecurDyn中如何修改履帶與地面的接觸參數?答案:進入履帶子系統模式,從數據窗口最下端選擇Track(LM)—TrackAsembly,右鍵選擇Property,在Contact Parameter中設置6. 在仿真履帶在路面運動時出現這種報錯,該怎么解決啊?
2555
杭州擬創(RecurDyn原廠) ??? 2年前
RecurDyn成功案例:小型履帶式裝載機通過仿真分析來控制成本 
▎仿真過程① 履帶系統的動力學建模② 物理實驗與仿真結果的比較及詳細的參數調試③ 進行仿真分析得到無法通過物理實驗得到的結果④ 基于”worst-case”的荷載和應力結果進行疲勞耐久分析來得到最安全的結果▎關鍵仿真技術? 專屬的履帶工具包,可輕松的建立各種履帶系統模型? 履帶部件創建功能支持自動創建復雜的履帶部件?
2404 2 2
杭州擬創(RecurDyn原廠) ??? 2年前
recurdyn履帶車輛指導教學(不限于履帶) 
本人專注recurdyn動力學仿真5年,具有豐富的仿真經驗,針對履帶建模仿真資料有以下5部分:1、通用履帶底盤建模,包括紙質版資料和視頻,2、擺臂履帶底盤建模,包括教學視頻和源文件,3、輪-履復合式履帶建模,4、recurdyn+EDEM聯合仿真。包括視頻和源文件,5、Recurdyn+Matlab聯合仿真
2307
Recurdyn 13060190875 ??? 4年前
從0到1學習Adams軸承建模方法 
模型介紹:在本文中,將導入一個行星齒輪組,它包含太陽輪、齒圈和安裝在行星架上的行星齒輪。本次建模過程主要使用Detailed類型的單列深溝球軸承,其內圈固定在太陽輪的軸上,外圈和太陽輪進行連接。施加驅動到太陽輪軸承上,這樣軸承將會傳遞傳遞運動給太陽輪,并進一步傳遞到軸上,通過這種軸承連接關系,模擬齒輪間的交互及其動態行為。
5009 35 11
郝大妞 ??? 1年前
RecurDyn建模常見問題:履帶建模 
履帶建模
3087 4 2
CAE仿真學習菌 ??? 2年前
東瀛輕騎兵——日本2款新型輪式裝甲車面世 
據資料顯示,該車戰斗全重26噸以下,車長8.09米,寬2.98米,車高2.27米(至車體頂)/2.87米(至炮塔頂),噸位與89式履帶式步兵戰車相近,外形尺寸較后者更大。該車采用8×8全輪驅動,擁有較好機動性,最大公路速度達到100千米/小時,但由于車寬超過了《日本道路交通法》的2.5米車輛寬度限制,因此出行必須要專門申請報告。
5675 1 1
飛天豬主 ??? 3年前
RecrDyn履帶專用Track工具包 

RecurDyn履帶專用Track工具包適用人群:履帶機構研究及從業人員,廣大動力學仿真用戶、RecurDyn興趣愛好者RecurDyn履帶專用Track工具包,打破傳統建模方式,引領仿真新潮流(免費)【已結束】 直播時間:2022-08-03 19:30課程背景:近年來隨著來履帶車輛的發展,人們對其機動性能的要求也越來越高,研究人員也越來越關注車輛的參數
4784 1 1
杭州擬創(RecurDyn原廠) ??? 3年前
ADAMS汽車差速器模擬仿真 
下圖是建立驅動齒輪和從動齒輪的參數(需要注意的是:兩個齒輪的位置,軸的方向),其他步驟與上文相同。
5353 4 1
擺渡人張 ??? 2年前
純電驅動車輛動力總成的優化與比較研究 
以純電動汽車為例,常見的動力總成拓撲結構包括有:中央驅動式動力總成、輪邊驅動式動力總成和輪轂直驅式動力總成等,如圖1所示。本文即以上述三種典型的動力總成拓撲結構為研究對象。 輪轂電機驅動方式用于微型純電動汽車,主要研究了拓撲結構的構型和參數設計。多輪驅動轉矩協同控制解決了車輛防滑工況時的縱向驅動轉矩和加速度降低等問題。
2977 6 5
天佑有限元 ??? 4年前
開發一種 Orbitless 電動汽車主減系統 附機械傳動系統Romax Designer建模、分析 
本項中的挑戰在于,Orbitless 傳動的結構和參數是否可在 Romax 仿真平臺中進行建模,完成分析和技術,并給出準確、可信的分析結果。目標和分工 此項目有效地證明,從系統級角度對電驅傳動系統進行建模與分析更加能夠降低開發風險、加速產品應用周期。
2403
機械加 ??? 4年前
電驅動系統減速器剛柔耦合動力學建模及振動噪聲優化 
3.2.5 空載滑行工況測試結果 在空載狀態下,電驅動系統減速器振動噪聲明顯小于轉矩負載情況時所產生的振動噪聲,且階次變化較弱。 4 結語 通過本文研究可知,導致電驅動系統減速器發生振動噪聲的原因有很多,比如載荷 / 扭矩工況、嚙合錯位量、加工制造誤差、輕量化輪體結構等,因此在實際工作中,技術人員可以通過對上述情況進行優化來降低電驅動系統減速器振動噪聲。
4251 2 1
聲學工程師小吳 ??? 2年前
案例 | Adams-EDEM聯合仿真預測軟土上軍事車輛的機動性 
Adams – EDEM 設置工作流程 模型定義 為原論文定義了兩個單獨的 Adams 車輛模型:輪式車輛和履帶式車輛。在本文中,我們僅討論輪式車輛。開發 EDEM 地面材料模型,并將其用于所有不同的聯合仿真。 A.Adams 輪式車輛模型 HMMWV的Adams 模型 (Humvee,請參見圖3)用于開發和驗證。
3038 1 1
Cruise ??? 3年前
DTAS 3D多約束裝配助力懸架公差分析&尺寸鏈計算:麥弗遜/雙叉臂/多連桿/H臂一網打盡 
本文主要討論雙叉臂前懸與五連桿后懸的建模方法。 如圖所示: 二、雙叉臂前懸與五連桿后懸的公差分析建模思路: 雙叉臂前懸主要建立如下的運動副,包括2個驅動副,一個是輪跳的,另一個是轉向驅動。 五連桿后懸懸架由于有5個連桿,所以與車架轉向節共有10個球副,減震器等可以建立滑塊副、球副等。
2554
DTAS棣拓尺寸公差分析及尺寸鏈計算 ??? 12月前
20條/頁 
 44
44 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
