輪式和履帶式車輛的多體動(dòng)力學(xué)(MBD)模型已經(jīng)得到驗(yàn)證,并用于預(yù)測(cè)車輛在硬質(zhì)路面上的各種工況性能。然而,在可變形的地形上進(jìn)行車輛仿真時(shí),目前的方法還無法完全表示車輛與軟土的動(dòng)態(tài)相互作用。設(shè)計(jì)車輛時(shí),工程師通常會(huì)利用其過去的物理測(cè)試經(jīng)驗(yàn)來預(yù)測(cè)車輛離開硬質(zhì)路面后的性能。 只有當(dāng)車輛做出來并測(cè)試之后,才能獲得有關(guān)車輛在軟土上的性能的實(shí)際數(shù)據(jù)。對(duì)于許多低比率或昂貴的車輛,樣機(jī)實(shí)際上也可能是最終產(chǎn)品,一旦進(jìn)行越野測(cè)試,就需要對(duì)實(shí)際車輛進(jìn)行重大修改。
準(zhǔn)確地模擬地形力學(xué)是理解越野車輛機(jī)動(dòng)特性的關(guān)鍵,并理解車輛和地形的變化將如何影響其動(dòng)態(tài)性能。
離散元模型(DEM)將土壤表示為單個(gè)粒子,它與其它粒子之間以及所遇到的任何物理對(duì)象之間都具有完全的自由運(yùn)動(dòng)。DEM 是一種粒子尺度數(shù)值方法,用于對(duì)顆粒材料和許多地質(zhì)材料(包括煤,礦石,土壤,巖石,骨料,顆粒,片劑和粉末)的散料行為進(jìn)行建模。DEM Solutions 的 EDEM? 是目前該領(lǐng)域領(lǐng)先的解決方案之一。
DEM 允許顆粒分解或者與料床分離,并且可以很容易地表示不同大小和形狀的顆粒。可以將不同類型的顆粒混合在一起以獲得非均質(zhì)的材料,或者根據(jù)需要分層。由于顆粒是三維動(dòng)態(tài)作用的,因此,側(cè)向推土效應(yīng)、車輪或履帶上的土壤堆積以及小丘的垂向表面特征可以很容易地用土壤模型來表示。另外,可以將顆粒壓實(shí)一次或多次,以提供各種土壤條件。
MBD 和 DEM 模型的集成
為了同時(shí)用單獨(dú)的 DEM 土壤模型求解現(xiàn)有的 MBD 車輛模型,需要進(jìn)行聯(lián)合仿真,以允許每個(gè)求解器準(zhǔn)確地計(jì)算車輛與土壤相互作用的動(dòng)態(tài)特性(圖 1)。MBD / DEM 對(duì)象的力和位移必須通過連接和管理通訊的結(jié)構(gòu)化接口在每個(gè)程序之間共享。

圖 1. Adams-EDEM 聯(lián)合仿真
當(dāng) MBD 模型與軟土 EDEM 模型集成時(shí),傳統(tǒng)的車輛-路面作用力被車輛和土壤顆粒之間的相應(yīng)力所代替。MBD 模型在每個(gè)積分步驟提供幾何位置,然后 EDEM模型根據(jù)所采用的離散顆粒模型計(jì)算作用在設(shè)備零件上的顆粒力。然后,將每個(gè)幾何體上的合力傳遞回 MBD模型,MBD模型在隨后的動(dòng)態(tài)時(shí)間步長中使用這些力。
MBD 模型與 DEM 土壤模型集成的第一步是在各自領(lǐng)域驗(yàn)證每個(gè)模型。通過隔離初始驗(yàn)證階段,可以獨(dú)立測(cè)試每個(gè)模型,以確保特性符合期望的要求。
驗(yàn)證MSC Adams MBD 模型之后,下一步是確定哪些幾何體可能與軟土接觸。對(duì)于輪式車輛,這可能簡(jiǎn)單來說就是四個(gè)輪胎。相反,履帶車輛將需要更多的接觸幾何體,包括履帶片段、連接器、車輪和車體。對(duì)于每一個(gè)包含相應(yīng)幾何圖形的 Adams 零件,都會(huì)創(chuàng)建一個(gè)GFORCE 元素,保存由 EDEM 土壤模型計(jì)算得出的力值。
EDEM 軟土顆粒必須設(shè)置好,以代表所需的 MBDEDEM 測(cè)試方案。例如,如果要求平坦的地形,則需要確定顆粒床的適當(dāng)尺寸。寬度應(yīng)足夠大,以確保任何橫向顆粒位移不會(huì)到達(dá)側(cè)面邊界,并且長度應(yīng)足夠長,可以執(zhí)行車輛操縱。
一旦EDEM 顆粒準(zhǔn)備完畢,車輛幾何體將從 Adams 模型導(dǎo)出,然后導(dǎo)入到EDEM 中。導(dǎo)入幾何體,以便為每個(gè)對(duì)應(yīng)的 Adams 零件有單個(gè) EDEM 幾何體生成。隨著 Adams 和EDEM 模型準(zhǔn)備好進(jìn)行仿真,最后一步是定義一個(gè)用于模型集成的通信協(xié)議。Adams 聯(lián)合仿真接口 (ACSI)是一個(gè)框架,可通過配置腳本和相應(yīng)的粘合代碼在 Adams 與其它軟件之間提供拓?fù)浣涌凇CSI 控制聯(lián)合仿真,允許異步通信以及各種內(nèi)插和外推算法。
ACSI 界面啟動(dòng)后,提供的配置文件將定義 Adams 和EDEM 模型在每個(gè)通信步驟如何共享數(shù)據(jù)。Adams 模型將提供每個(gè) GFORCE的位置,然后EDEM 模型將位置分配給相應(yīng)的 EDEM 幾何體。基于此幾何位移,EDEM 求解器將計(jì)算土壤顆粒的散料行為,并確定每個(gè)EDEM 幾何對(duì)象上的復(fù)合顆粒力和彎矩。然后,力通過ACSI傳遞回去,ACSI將值分配給相應(yīng)的 GFORCE 元素這些力將包含在 Adams 求解器采取的下一個(gè)動(dòng)力學(xué)時(shí)間步中。
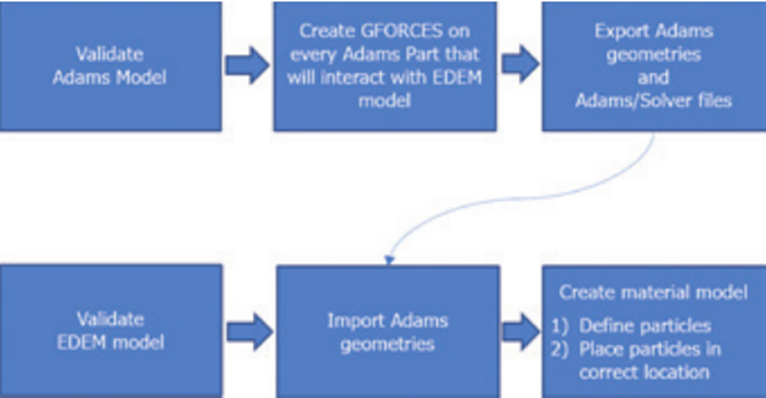
圖 2. Adams – EDEM 設(shè)置工作流程
為原論文定義了兩個(gè)單獨(dú)的 Adams 車輛模型:輪式車輛和履帶式車輛。在本文中,我們僅討論輪式車輛。開發(fā) EDEM 地面材料模型,并將其用于所有不同的聯(lián)合仿真。
HMMWV的Adams 模型 (Humvee,請(qǐng)參見圖3)用于開發(fā)和驗(yàn)證。該模型先前已用于硬質(zhì)路面的仿真,并使用各種測(cè)試手段驗(yàn)證了其性能。與 EDEM 顆粒模型的初始集成僅包括四個(gè)輪胎作為與地形的接觸對(duì)象。隨后,車身和某些裸露的懸架元件也被導(dǎo)出,以便在聯(lián)合仿真中使用。

EDEM 的用戶已經(jīng)進(jìn)行了廣泛的測(cè)試和關(guān)聯(lián),以定義與所需物理土壤的特性相匹配的顆粒。為了幫助用戶得到所期望的顆粒模型,EDEM 提供了 GEMM 材料數(shù)據(jù)庫用戶可以基于三個(gè)輸入查找預(yù)定義的材料:應(yīng)用規(guī)模:坡度角;材料的堆密度。最終,EDEM 土壤入門包提供了八種開箱即用的樣本材料,這些材料具有不同的可壓縮性和粘性范圍。
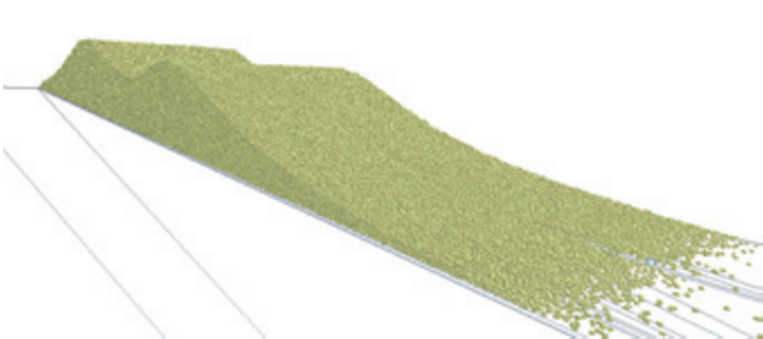
圖4 顯示了一個(gè)雙小丘地形設(shè)置,用于HMMWV 和坦克的 Adams 模型。為了創(chuàng)建此測(cè)試用例,將 Adams路面導(dǎo)入 EDEM,然后將一定量的顆粒落到路面上,這些顆粒根據(jù)材料特性形成自然的圓形小丘。然后將相同數(shù)量的顆粒在固定的偏移位置落到路面上,創(chuàng)建所述背景中的第二個(gè)圓形小丘,其山峰略高于第一個(gè)小丘。
Adams HMMWV 模型在各種軟土地形上進(jìn)行了仿真,每種情況中都使用相同的EDEM顆粒模型。第一次操縱,是 HMMWV 穿越平面顆粒床,如圖 5 所示。
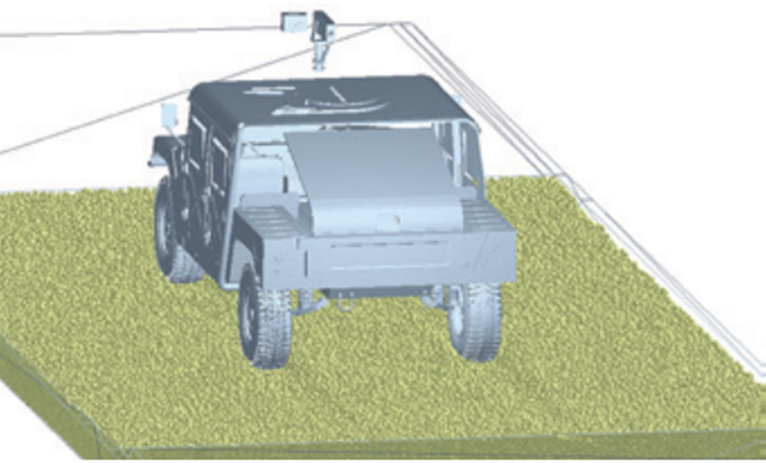
圖 5. HMMWV 以 20kph 的速度在平坦地形上
然后,HMMWV 以不同的速度翻越一個(gè)小丘,以研究穿越障礙物的能力,以及工況中所需的功率。圖 6 顯示了以 20kph 的速度行駛的 HMMWV,試圖爬上小丘,并使前輪卡在軟土中。

圖 6. HMMWV 以 20kph 的速度行駛在單個(gè)小丘上
高速行駛中,HMMWV到達(dá)小丘的頂峰時(shí)會(huì)在空中飛行基于這一特性,HMMWV 以不同的速度在雙丘上行駛車輛以不同的速度在不同點(diǎn)撞擊地面。如圖 7所示,當(dāng)以 60kph 的速度行駛時(shí),HMMWV 剛好在第二座小丘的頂峰前著陸,其沖擊力將土壤顆粒“飛濺”起來。

圖 7. HMMWV 以 60kph 的速度行駛在雙丘地形上
下面討論 HMMWV 模型的兩個(gè)仿真結(jié)果。第一,車輛穿越平坦地形;第二,HMMWV 穿過 30%的邊坡。
為了使HMMWV在邊坡上行駛,車輛從平坦堅(jiān)硬的路面上啟動(dòng),然后逐漸旋轉(zhuǎn),直到達(dá)到所需的坡度。在硬質(zhì)路面終點(diǎn)開始軟土路面。邊坡上,Adams 模型的轉(zhuǎn)向控制器設(shè)置為嘗試保持直線。圖8 展示了車輛離開硬質(zhì)路面并進(jìn)入料床時(shí)的行為。當(dāng)轉(zhuǎn)向系統(tǒng)對(duì)減小的牽引力作出反應(yīng)時(shí),車輛最初會(huì)滑下斜坡,并進(jìn)行補(bǔ)償,直到車輛恢復(fù)到所期望的直線路徑。
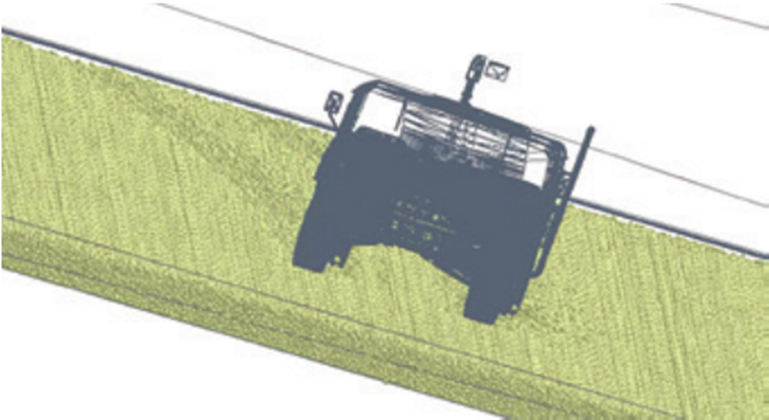
圖 8. HMMWV 以 25kph 的速度行駛在 30% 的邊坡上
一個(gè)重要驗(yàn)證步驟,是對(duì)車輛在硬質(zhì)路面上的輪胎力與穿越軟土?xí)r的輪胎力進(jìn)行比較。圖9顯示了整個(gè)模擬過程中左后輪胎與地面之間的作用力。直到大約時(shí)間=1秒,HMMWV 位于硬質(zhì)路面上,通過標(biāo)準(zhǔn)的 Adams當(dāng)車輛過渡到Tire 子程序計(jì)算輪胎力 (以紅色顯示)。軟土上時(shí),Adams 輪胎力變?yōu)榱悖?EDEM 顆粒力(以藍(lán)色顯示) 開始承載。在初始過渡階段之后,車輛穩(wěn)定下來,由 EDEM 顆粒計(jì)算出的接觸力等于硬質(zhì)路面上的輪胎力。
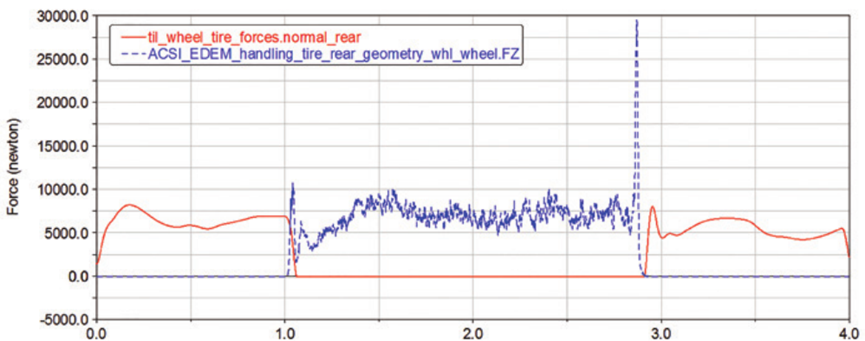
HMMWV 離開料床時(shí),EDEM 顆粒力出現(xiàn)峰值,這是由于從軟土過渡到硬質(zhì)路面時(shí)的局部顆粒效應(yīng)(橫穿一定比例的被推到硬質(zhì)路面上的顆粒)。一旦車輛返回到硬質(zhì)路面,輪胎力將再次通過 Adams Tire 方法計(jì)算。
HMMWV邊坡操縱(從右到左的向下傾斜),為研究車輛過渡到軟土?xí)r的特性和在 EDEM 顆粒上保持直線行駛的能力,提供了機(jī)會(huì)。
仿真從HMMWV 在平坦堅(jiān)硬的路面上以25kph 的恒定速度行駛開始。在 3.75 秒處,硬質(zhì)路面開始逐漸滾動(dòng),直到大約 5.5 秒時(shí)達(dá)到30%的邊坡。車輛繼續(xù)在堅(jiān)硬的邊坡道路上行駛直到大約 7.6 秒,此時(shí)硬質(zhì)路面段結(jié)束,軟土開始。EDEM 顆粒床的放置,使得硬質(zhì)路面的坡度與軟土相匹配:然而,如圖 10 所示,車輛進(jìn)入可變形地形時(shí)會(huì)出現(xiàn)瞬態(tài)響應(yīng)。
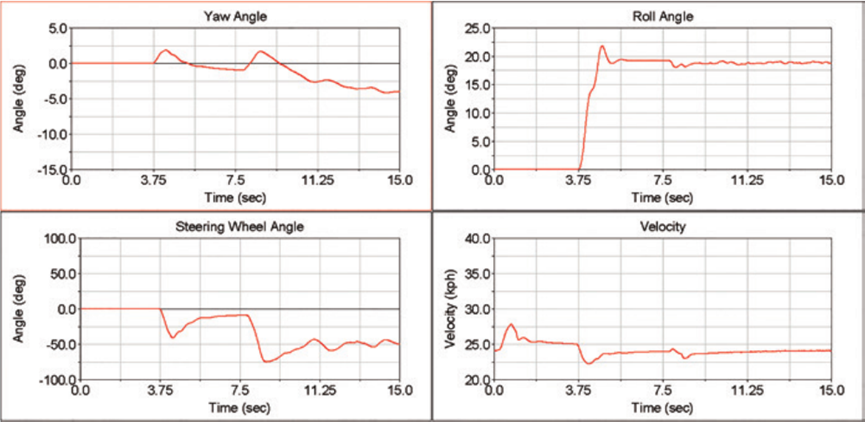
當(dāng)HMMWV的前輪進(jìn)入顆粒床時(shí),車輛最初向左側(cè)偏航而后輪仍在硬質(zhì)路面上。一旦整輛車都在軟土上,它就會(huì)開始沿斜坡向下漂移,轉(zhuǎn)向控制器會(huì)增加角度,使其返回到直線路線,從而導(dǎo)致車輛朝相反的方向偏航。仿真結(jié)束時(shí),偏航已經(jīng)穩(wěn)定,轉(zhuǎn)向角保持在 50 度左右,以便沿直線方向行駛。

為了驗(yàn)證 Adams-EDEM 的實(shí)施,提出了一種測(cè)試程序(參考文獻(xiàn) 1)。
在 Adams 多體動(dòng)力學(xué)模型內(nèi)部創(chuàng)建試驗(yàn)臺(tái),壓力/力也在 Adams 中定義。
試驗(yàn)臺(tái)的幾何體將從 Adams導(dǎo)出,并導(dǎo)入 EDEM,然后填充所需的上壤顆粒(見圖11)。
運(yùn)行 Adams-EDEM 聯(lián)合仿真,對(duì)板施加規(guī)定的力或壓力,并對(duì) Adams 仿真結(jié)果進(jìn)行后處理,生成相應(yīng)的 Bekker-Wong 參數(shù)。
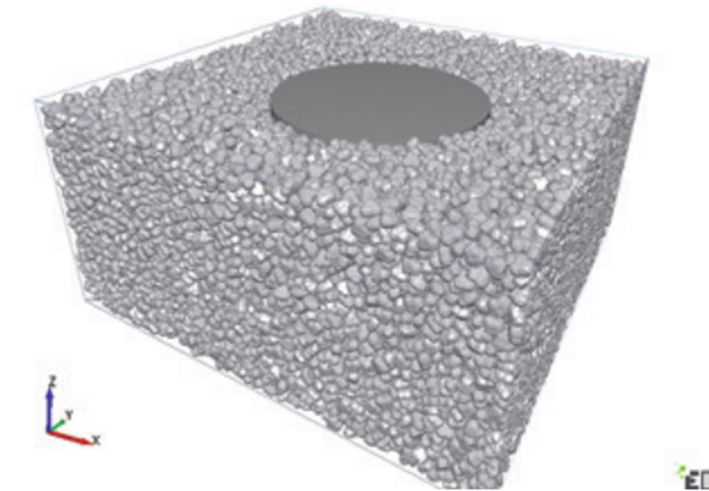
圖 11. Adams-EDEM 試驗(yàn)臺(tái)用于土壤參數(shù)表征
B. Adams-EDEM 土壤特性與 Bekker-Wong 參數(shù)的一致性
Adams 多體動(dòng)力學(xué)車輛與 EDEM 離散元土壤模型聯(lián)合仿真的流程,將既定程序引入到一個(gè)新的維度,以驗(yàn)證離散元土壤特性。整個(gè)解決方案在離散元環(huán)境中執(zhí)行時(shí),力 / 位移相互作用全部在內(nèi)部計(jì)算。借助 Adams-EDEM 聯(lián)合仿真,每個(gè)軟件求解各自的方程,在既定的通信間隔交流位移和力。此外,車輛動(dòng)力學(xué)可以在車輛和土壤顆粒之間產(chǎn)生快速變化的位移和力值。
深圳市優(yōu)飛迪科技有限公司成立于2010年,是一家專注于產(chǎn)品開發(fā)平臺(tái)解決方案與物聯(lián)網(wǎng)技術(shù)開發(fā)的國家級(jí)高新技術(shù)企業(yè)。
十多年來,優(yōu)飛迪科技在數(shù)字孿生、工業(yè)軟件尤其仿真技術(shù)、物聯(lián)網(wǎng)技術(shù)開發(fā)等領(lǐng)域積累了豐富的經(jīng)驗(yàn),并在這些領(lǐng)域擁有數(shù)十項(xiàng)獨(dú)立自主的知識(shí)產(chǎn)權(quán)。同時(shí),優(yōu)飛迪科技也與國際和國內(nèi)的主要頭部工業(yè)軟件廠商建立了戰(zhàn)略合作關(guān)系,能夠?yàn)榭蛻籼峁┩暾漠a(chǎn)品開發(fā)平臺(tái)解決方案。
優(yōu)飛迪科技技術(shù)團(tuán)隊(duì)實(shí)力雄厚,主要成員均來自于國內(nèi)外頂尖學(xué)府、并在相關(guān)領(lǐng)域有豐富的工作經(jīng)驗(yàn),能為客戶提供“全心U+端到端服務(wù)”。



























