Recurdyn履帶問題

1.問題:整車履帶仿真出錯,車輛越障時遇到障礙物直接彈開
思路:
關于這類模型需要調節履帶和地面之間的接觸參數、Bushing force,還有驅動函數。
彈飛了是因為接觸剛度太大了,調小一些,在100以內繼續調節,Bushing force也太大了,Rz改成0或者小一些就行,這樣雖然不會彈飛,但是由于坡度問題,還是需要將你的驅動函數進行修改
2.問題:履帶脫落
思路:
履帶鏈節之間是通過力來連接的,有力的限制,一般情況下尺寸參數合適不會考慮干涉
另外Bushing Force中其實是有關于鏈節之間旋轉角度限制的參數,Stop angle,可以防止前后履帶板之間旋轉角度過大而碰撞
用于搜索與鏈輪接觸的鏈節的工具。有兩種方式,Full Search,搜索所有的鏈節并與之進行接觸,和Partial Search,搜索鏈輪附近的履帶鏈節并與之進行接觸,選用Partial Search可以減少仿真時間,但是可能會出現鏈輪與部分履帶鏈節之間不發生接觸導致穿透的情況,而Partial Search又可以讓用戶自定義搜索范圍,就是User boundary」,因此如果沒接觸上建議先變為Full search
3.問題:履帶齒與地面參數設置
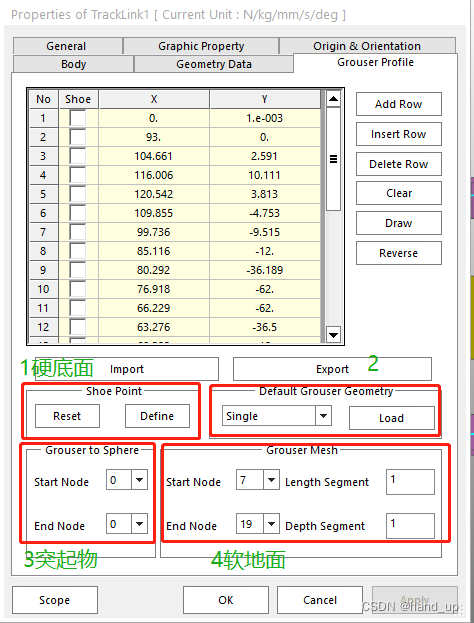
有兩種類型的車輛-土壤相互作用。一種是硬地面接觸,另一種是根據Bekker理論的軟土壤接觸。在硬地接觸中需要鞋點(shoe point),在軟土中需要格柵網(grouser mesh)。
另外,如果光柵與球體(grouser to sphere)的接觸被定義為代表與巨石和巖石的接觸,則必須選擇光柵結點。
1.Shoe Point鞋點: 鞋點用于定義履帶齒和硬地面之間的相互作用。這些點是通過在表格的第一列前打勾進行選擇。
Reset:重置
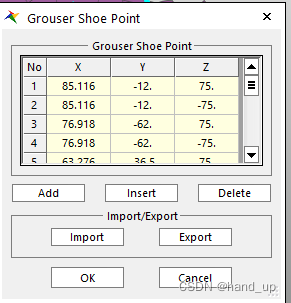
Define:在以下對話框中修改鞋底點的位置。
2.Default Grouser Geometry默認履刺形狀:有各種類型的履刺適用于不同的工作目的和地面條件,如特別設計的履刺,在軟地面上具有較低的地壓。在RecurDyn/Track_LM中,有單層、雙層和三層的。
3.Grouser to Sphere: 埋在地下的石頭等物體通常被簡單地定義為一個球體。碾盤和球體之間的接觸是由碾盤輪廓上的接觸點定義的。如果用戶定義了磨盤的起始節點和結束節點,那么兩個節點之間的所有節點都會成為磨盤與球體接觸的接觸點。
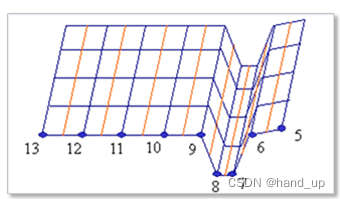
4.Grouser mesh格柵網: 當車輛在軟土上運行時,用點來定義接觸是不夠的。因此,必須提供更多的點,以在格柵的表面形成斑塊。為了實現這一目標,可以將格柵的長度和深度劃分為若干段。例如,當起點節點數為5,終點節點數為13,長度段為2,深度段為4時,軌道鏈接光柵的網格劃分如下。
4.問題:履帶路面性質修改
建立其他特征路面
方法一:選擇在建立路面的時候,就將路面曲線Curve繪制成自己需要的形狀,然后再變成Road
方法二:在安裝路徑下找到文件:RecurDyn V * R * \ Toolkits \ MF tire \ Road data Files,然后將其拷貝到存儲模型的同一個文件夾中,接下來單擊:Ground>Road Data GRImport,選擇剛剛保存的rdf文件即可
5.問題:履帶裝配信息
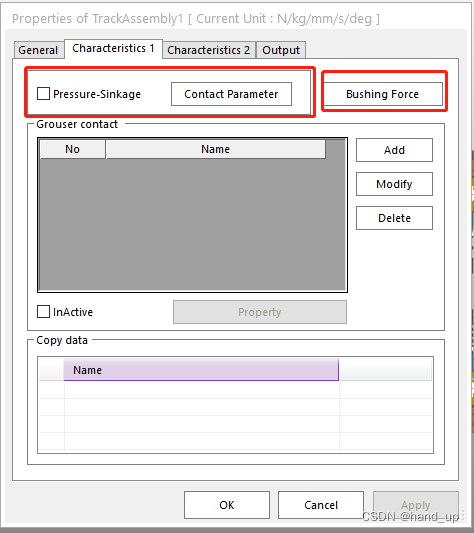
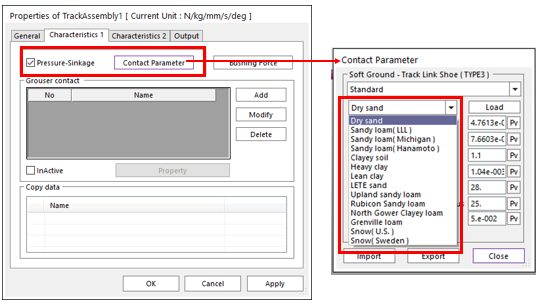
Pressure-Sinkage壓力下沉:如選定,地面和履帶板之間的接觸參數會隨著土壤條件的變化而變化
Contact Parameter接觸參數:定義地面和履帶板之間的接觸特征值。
A:若選中“壓力下沉”選項,則“土壤地面”的接觸參數。
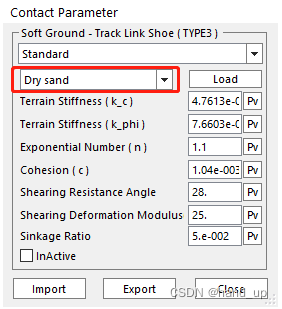
壓沉關系用Bekker提出的方程描述
式中,p為壓力,b為接觸片的較小尺寸,即矩形接觸區域的寬度,z為下沉,n,Kc,Kφ 為壓力-下沉參數。
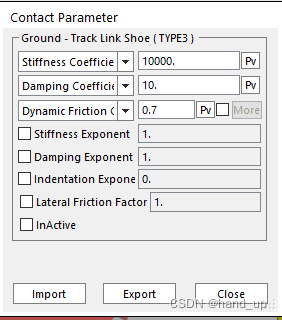
B:若未選中“壓力下沉”選項,則“剛性地面”的接觸參數。
Bushing Force襯套力:定義要在兩個連桿之間連接的特征值,設置履帶剛度。
Bushing Force是力元,旋轉副是約束,這是最本質的區別;
約束是限制自由度的,力元不會限制自由度,因此用Bushing Force可以避免冗余約束,
Bushing Force可以自定義6個自由度剛度和阻尼的大小去限制物體的運動,因此可以實現旋轉副的作用效果,具體什么時候用旋轉副、什么時候用Bushing Force就看你結構的運動,以及是否考慮冗余約束.
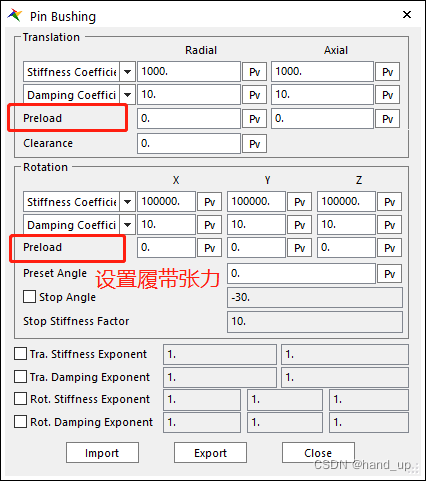
設置兩個履帶板之間的連接襯套所有自由度的平移和旋轉的剛度和阻尼;在襯套力的軸向,通過設置preload,設置track tension(履帶張力)
Grouser contact履帶齒接觸: 將Grouser之間的接觸定義為球體到球體的接觸
Copy Data復制數據:對于兩個以上的履帶系統,用戶可以很容易地將相同的特性應用于另一個履帶系統

Characteristics 2標簽用來定義或修改履帶接觸的元素列表
履帶子系統中要增加另一個托輪,創建新的車輪后,使用Navigation或List,從列表中,選擇新的車輪。
使用Grouser-to-Sphere Contact,選擇用來表示地面石頭的球,或其它與履帶接觸的物體。
通過在對話框的底部勾選Initial Velocity(x-axis) of Links對話框,并在文本框中輸入初始速度,設置履帶的Initial Velocity。
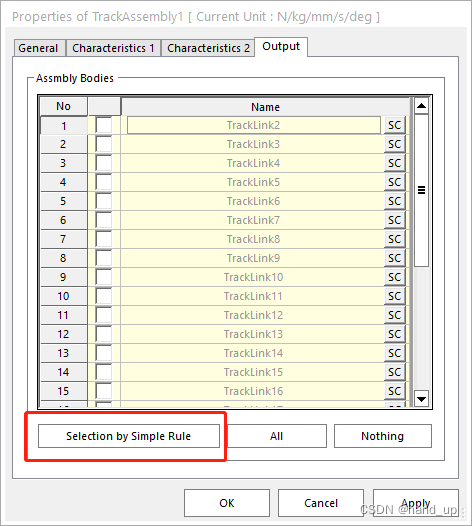
Output標簽,定義輸出單獨鏈節仿的真結果
默認是從第一個鏈節TrackLink2,保存數據。可以手動勾選對話框,或根據編號增量,通過Selection by Simple Rule自動選擇鏈節
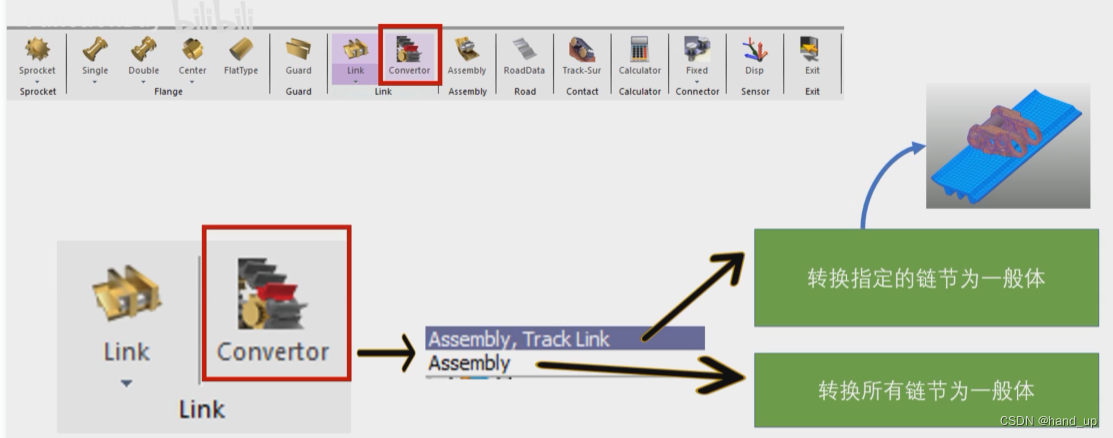
6.履帶質量較輕,求解器的步長小,求解速度慢,轉換為一般體。
求解步長在-7、-8次方,這是使用T-Part模型(工具包創建的履帶)求解時常遇到的問題, 如果T-part的質量較輕(所謂T-part是指用于裝配的體;相對應的是一般體。T-part不能柔性化),求解器的步長就會變小。履帶的質量很輕,建議使用Convertor工具將履帶轉換為一般體進行求解。
————————————————
版權聲明:本文為CSDN博主「hand_up」的原創文章,遵循CC 4.0 BY-SA版權協議,轉載請附上原文出處鏈接及本聲明。
原文鏈接:https://blog.csdn.net/hand_up/article/details/130871729





















工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP




