



局部坐標系到全局坐標系的轉化?
一種橫觀各向同性材料,在局部坐標系下 x軸垂直于橫觀各向同性面,yoz為橫觀各向同性面,給出局部坐標系下的剛度矩陣,用E1、E2、ν1、ν2、G12表示,E1和ν1為垂直于橫觀各向同性面的彈性模量和泊松比,E2和ν2為平行于橫觀各向同性面的彈性模量和泊松比,G12為剪切模量繞z軸旋轉α角度到全局坐標系,給出旋轉矩陣如果能加微信長期交流,就更好了,有償拜謝
4304 2 3
Summy27 ??? 2年前
農業機械清選仿真-Fluent-RockyDEM單向耦合 
這個點的坐標可以提前通過spaceclaim中的測量功能點擊料滾的軸或者一端的中心點測量出來,然后記錄下這個點的坐標,輸入進axis origin一欄。 右上方入口設為-100Pa靜壓,左下方和右下方入口設為表壓為0的條件。
3128 9 5
臨淮散仙 ??? 3年前
[軟件使用]abaqus殼單元局部坐標系,你學會了嗎? ![[軟件使用]abaqus殼單元局部坐標系,你學會了嗎?](https://img.jishulink.com/upload/202112/48ea4955cef14d1bb2584d8f32631e07.png?image_process=resize,fw_294,fh_172,)
(2)確定好n軸之后,接下來的1軸和2軸按照以下規則確定: 將整體坐標系的X軸投影到殼單元上,投影方向即為1軸。再按照右手定則,1-2-n軸形成右手坐標系,即右手拇指指向n軸時,其余4指的旋轉方向從1軸轉向2軸,具體圖解如下:右側為整體坐標系,左手為局部坐標系。
4474 14 8
寒江雪_123 ??? 4年前
質量管理 | 功能尺寸和局部坐標系在eMMA軟件輔助車身裝配中的應用 
局部坐標系設定“正確的測量基準”01 為何需要局部坐標系?在全局坐標系下,一個零件可能因夾具偏差或焊接變形發生整體位移或旋轉。這種“整體偏差”可能并不影響其與相鄰零件的裝配。如果在全局坐標系下評價,所有測點都會顯示超差,從而掩蓋了零件自身真正的制造誤差和關鍵的裝配問題。
2164
海克斯康設計與仿真 ??? 6月前
Abaqus疑難雜癥——局部坐標系的那些事兒 
其 含義 為: 創建節點集合ex,將這些節點的自由度轉換至柱坐標系下,為這些節點定義位移邊界條件,約束2方向(周向)上的位移。 其中TYPE=C表示局部坐標系的類型為柱坐標系,如果TYPE=R,則為局部直角坐標系,TYPE=S,則為球坐標系。 在大位移分析中,此局部坐標系的方向不會隨著材料的旋轉而旋轉。
7043 8 8
易公子 ??? 4年前
生產制造 | 產品加工-EDGECAM創建多方向坐標系 
wx_fmt=png&from=appmsg"></p><p><br></p><p><strong>圓弧:</strong>提取圓弧特征,選擇圓弧,以圓弧建立面,以法面為Z軸建立坐標系;</p><p><strong>直線:</strong>提取直線特征,選擇直線,以直線方向為Z軸建議坐標系;</p><p><strong>通過 3 點:</strong>選擇三點建立面,以法面為Z軸建立坐標系;
2807
海克斯康設計與仿真 ??? 1年前
如何實現局部坐標系跟隨物體一起轉動?
有兩個剛體,一根軸,一個底座,均為軸對稱結構,Y方向為對稱軸 我需要底座首先繞Z軸旋轉一定角度,然后底座和軸各自沿著自己移動后的對稱軸自轉。 我分別設置了局部坐標系,可是自轉時卻是繞著全局坐標系的Y反向旋轉的,請問如何解決呢?
2204 1
齊沂 ??? 3年前
lsdyna如何輸出局部坐標系下的動畫d3plot?
k文件定義了繞全局坐標系坐標軸的旋轉,但是輸出的動畫中模型一直在轉動,不方便觀察,目前考慮定義一個局部坐標系,讓其靜止不動,請問這樣可以實現嗎?
3324 5 3
興_6072 ??? 3年前
*DEFINE_BOX_LOCAL定義局部坐標系的Box 
它是從上步得出的局部坐標系的z軸,再將局部坐標系的z軸 和 局部坐標系的x軸 這兩個向量 叉乘得到的。</p><p><br></p><p><br></p><p>所以,看明白上邊的圖,這個局部坐標系的box就<strong> 一眼明了。
2709 2 1
OnTheWay08 ??? 1年前
Ansys Zemax|如何使用坐標返回功能恢復原坐標系 
坐標返回功能非常易于使用:先選擇“坐標返回”的坐標系的方式,再選擇“至表面”返回至期望表面的坐標系。“無”為禁用坐標返回功能其次還有三種恢復坐標系的方式可供選擇:“僅方向”:僅確定關于X、Y和Z軸的傾斜,以將坐標系的方向恢復到前一個表面。不會調整表面頂點的位置偏移。“XY方向”:確定關于X、Y和Z軸的傾斜以及在X和Y方向上的偏心,以恢復坐標系的方向。
1215
宇熠科技 ??? 2月前
Maxwell繪圖 坐標系簡介 
(只改變原點,不改變X軸、Y軸、Z軸方向)
旋轉(Rotated):相對于現有坐標系,通過旋轉坐標軸,來創建新坐標系,坐標系原點不變,X軸、Y軸、Z軸方向均發生改變。
偏移和旋轉(Both):利用以上偏移和旋轉角度來創建新坐標系,坐標系原點和X軸、Y軸、Z軸同時發生變化。
4993 3 2
陳亞明 ??? 1年前
坐標轉換與參數計算介紹 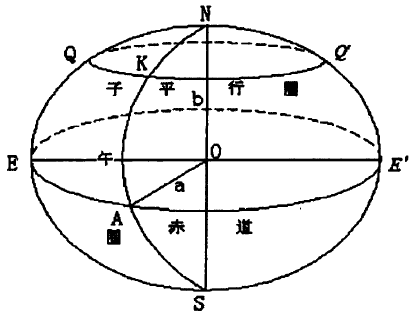
它與正高 H正和正常高 H正常,存在以下關系:H=H正+N(大地水準面差距)圖2 大地坐標系示意圖圖3 大地高程示意圖(2)空間直角坐標空間直角坐標系的坐標原點為橢球的中心,X軸為赤道面和起始子午面的交線;將在赤道面上并與X軸垂直的方向定為Y軸;坐標系的Z軸為橢球的旋轉軸,由此構成右手直角坐標系0-XYZ。
2676 2
繪夢流光 ??? 3年前
FBD型礦用軸流式通風機葉輪氣動噪聲的數值分析 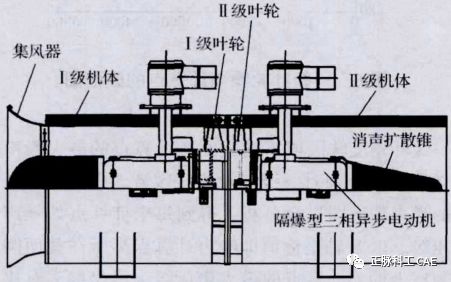
圖4 坐標系 圖5 旋轉區域截面及計算點所在位置(mm) 3.2 二級葉輪旋轉區域噪聲計算點的布置 二級葉輪噪聲計算點的布置與一級葉輪相同,同樣以二級葉輪輪轂中心為坐標原點,出口軸線方向為 Z 軸正方向,以過原點的兩兩相互垂直的徑向分別為 x 、Y 軸,以同樣的數值在垂直于 z 軸方向取 5 個截面。
2239 1
雙螺桿泵 ??? 2年前
離心式壓縮機仿真案例 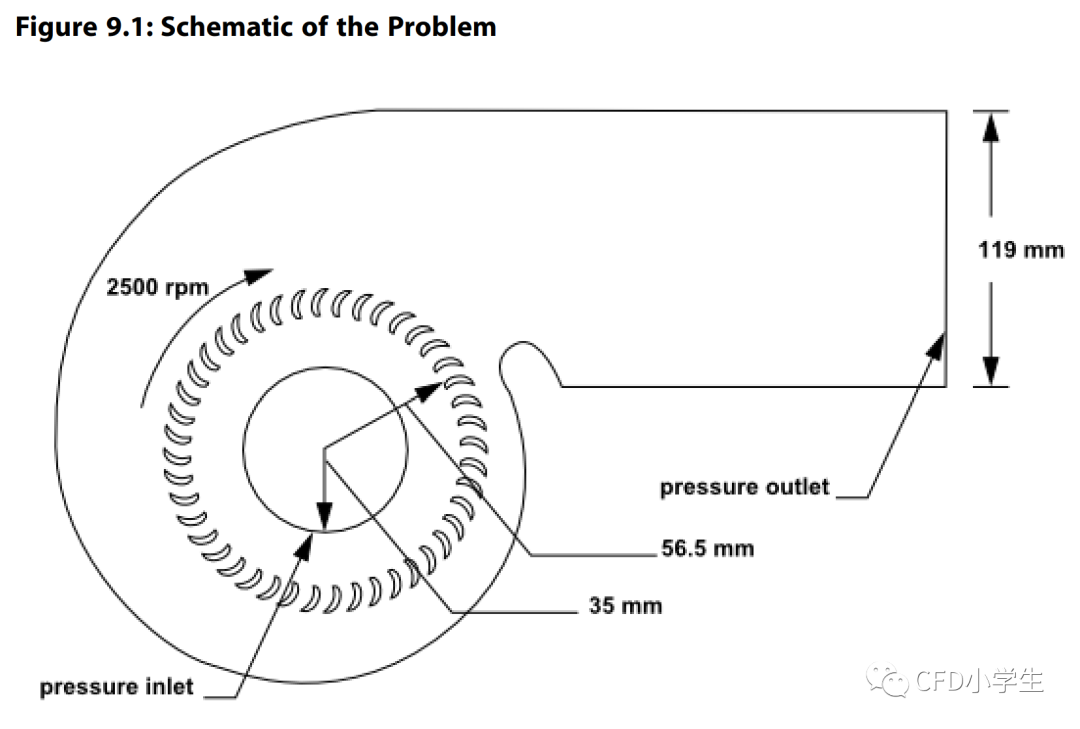
“mesh interface”創建(自動配對、命名并創建成“interior zones”); 3、移動參考坐標系方程;考慮坐標系統以線性速度vt進行平移并以角速度ω旋轉相對于靜止參考坐標系(stationary/inertial),旋轉系統原點位置矢量為r0;旋轉軸單位方向矢量a:對于CFD問題中計算域被定義為與旋轉坐標相關,計算域中任一點距離移動坐標系原點位置矢量為
2787 2 1
我愛汽輪機仿真 ??? 2年前
Altair SimSolid 2023 新版本功能和安裝方法\學習教程 
要導入虛擬襯套,需要襯套坐標、沿所有三個軸的線性和旋轉剛度以及坐標系。襯套基于指定的直徑進行映射。它連接到從輸入坐標指定直徑范圍內的兩個零件。 局部坐標系中的云圖 現在可以沿局部坐標系繪制用于結構和模態分析的所有云圖。
2662 1
蝰蛇設計 ??? 2年前
Fluent UDF為所欲為的后門 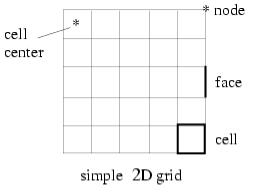
UDF遍歷網格的順序很簡單,就是c從小到大遍歷,既不按照x軸坐標,也不按照y軸坐標</p><p><br></p><p><img src="https://mmbiz.qpic.cn/mmbiz_png/8tJMdLVYZy8j0rCdSib2lia3rRltUFjNabZ6m2ricW6gibjwyBb6y5QHsxG4CpdbhWGlP8ufibkkjGicStpVibd8THJmw/640?
2845 2
Fluent學習筆記 ??? 1年前
Fluent案例解析_MRF旋轉機械_水泵 
CFD_POST后處理得到的流線圖視頻_ ▊案例解析 ?本案例采用MRF多重參考系模型進行水泵葉片旋轉的一個仿真,與單一旋轉坐標系模型的區別在于本案例中存在多個坐標系,葉片旋轉區域采用一個旋轉坐標系,其他部分流體域采用另外一個坐標系; ?實際情況是葉片通過旋轉來帶動靜止的水,本案例采用的是流體域旋轉但葉片相對靜止的方式進行近似的穩態計算求解,需要特別注意旋轉部分流體域和葉片的設置
4135 7 1
我愛汽輪機仿真 ??? 2年前
螺栓管道法蘭連接的軸對稱分析(Axisymmetric analysis of bolted pipe flange connections) 
因此,在本例中,對稱面處節點應施加對稱邊界條件(約束對稱面法向位移和兩個剪切方向的旋轉自由度)。在定義不同對稱面的邊界條件時需要考慮到引用多個坐標系帶來的求解問題。螺栓載荷采用bolt load載荷定義模塊施加,螺栓載荷的施加一般要考慮到過程中的收斂性,一般會定義較小的值逐漸增大到預緊力后再使螺栓保持固定長度以進行后續分析。
2597 3
CAE從入門到入土 ??? 12月前
Fluent實用案例 | 重疊網格UDF撲翼機氣動仿真 
本案例選擇DEFINE_CG_MOTION進行定義,omega[0]代表z軸旋轉方向,本案例設計翼型上下擺動18°,相關的UDF代碼如下:C#include "udf.h"#include "mem.h"#include "dynamesh_tools.h"DEFINE_CG_MOTION(pyj, dt, vel, omega, time, dtime)
2692 2 1
CFD仿真庫 ??? 8月前
有限元理論基礎及Abaqus內部實現方式研究系列39: 梁單元差異(3)-剪力和彎矩 
由上可知,對y-加載,彎矩是繞-z軸旋轉。而-z軸也就是Mz方向可由梁方向t與加載方向F按右手正交坐標系規則叉乘得到。梁方向t由節點1指向節點2。如下圖所示。 對y加載,y下半部的為正,彎矩為正,彎矩是繞z軸旋轉。
6912 12 6
SnowWave02 ??? 3年前
20條/頁 
 23
23 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
