



UG NX旋轉(zhuǎn)模型時(shí)如何設(shè)置自定義旋轉(zhuǎn)點(diǎn) 
在使用UG軟件進(jìn)行模型查看過程中,旋轉(zhuǎn)模型的時(shí)候,默認(rèn)是按照坐標(biāo)原點(diǎn)旋轉(zhuǎn),如果想自定義旋轉(zhuǎn)點(diǎn),應(yīng)該如何操作實(shí)現(xiàn)呢?工具/原料教程以UG6.0為例方法/步驟教程以新建的長(zhǎng)方體模型為例,首先是點(diǎn)擊長(zhǎng)方體命令。在長(zhǎng)方體窗口,設(shè)置長(zhǎng)方體參數(shù)。設(shè)置好參數(shù)之后,單擊確定鍵即可繪制長(zhǎng)方體。
3613
張偉一 ??? 3年前
在ABAQUS中能不能在同一個(gè)位置定義一個(gè)旋轉(zhuǎn)彈簧一個(gè)剪切彈簧
在ABAQUS中能不能在兩個(gè)節(jié)點(diǎn)連接處定義一個(gè)旋轉(zhuǎn)彈簧一個(gè)剪切彈簧
2390 9 2
Bwzj ??? 2年前
新手小白求助,fluent動(dòng)網(wǎng)格運(yùn)動(dòng)能自定義旋轉(zhuǎn)軸嗎?
如圖所示,我這個(gè)平板一開始在默認(rèn)坐標(biāo)系下偏置了20度,模擬撲翼的初始仰角,我后面采用動(dòng)網(wǎng)格加udf的形式,想讓這個(gè)平板分別繞初始位置這兩條邊轉(zhuǎn)動(dòng),請(qǐng)問怎么定義這個(gè)運(yùn)動(dòng)呢,我只能修改旋轉(zhuǎn)點(diǎn)的位置,但是改不了兩個(gè)旋轉(zhuǎn)軸的位置,默認(rèn)還是繞著默認(rèn)坐標(biāo)系轉(zhuǎn),謝謝各位佬
2294 1
用戶_60723 ??? 1年前
ADAMS怎么導(dǎo)入力矩?cái)?shù)據(jù)驅(qū)動(dòng)轉(zhuǎn)動(dòng)副旋轉(zhuǎn)?
我有一組力矩?cái)?shù)據(jù),怎么導(dǎo)入ADAMS里控制轉(zhuǎn)動(dòng)副運(yùn)動(dòng)?
2185 1 1
越關(guān)山 ??? 3年前
改良楔形葉片旋轉(zhuǎn)空化器水動(dòng)力學(xué)特性數(shù)值模擬分析 
圖 9 進(jìn)一步給出了不同轉(zhuǎn)速下不同半徑處2 種葉型形成的空泡長(zhǎng)度間的定量比較,其中實(shí)心圓點(diǎn)和實(shí)心方形點(diǎn)分別代表原始葉型和改良葉型出口邊處形成的空泡長(zhǎng)度,空心三角形點(diǎn)代表改良葉型副進(jìn)口邊處形成的空泡長(zhǎng)度。此處,空泡長(zhǎng)度 L 定義為旋轉(zhuǎn)平面內(nèi)任一半徑處空泡在圓周方向上所占據(jù)的弧長(zhǎng)。
3176 2
Infiniteelements ??? 2年前
lspp中使一個(gè)part在Y軸位移的同時(shí)又繞X軸旋轉(zhuǎn)的關(guān)鍵詞如何定義?
有沒有大佬幫忙解答一下呀,感謝各位大佬
2331 1 3
白百柏 ??? 2年前
如何在多體動(dòng)力學(xué)模型中評(píng)估齒輪嚙合剛度 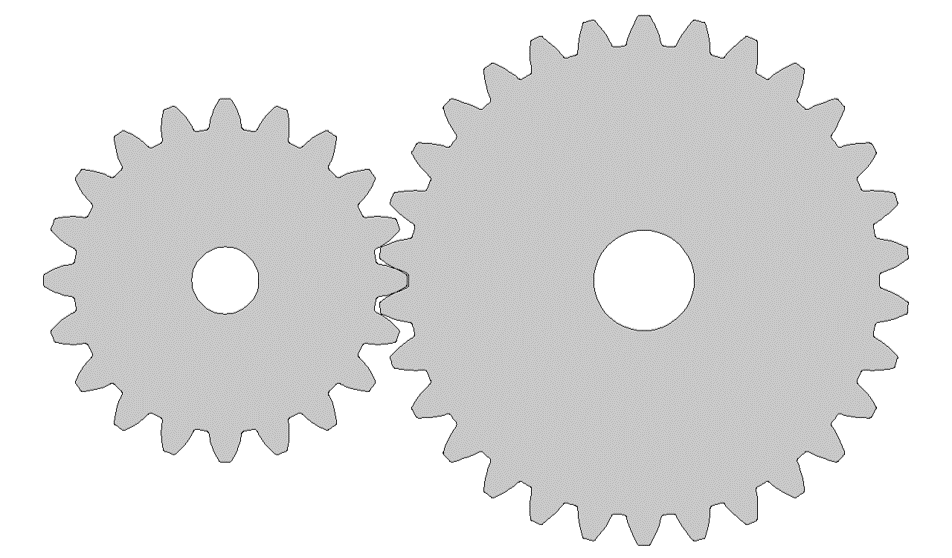
齒輪副中的接觸副邊界(左)和有限元網(wǎng)格(右)。 由于嚙合周期中齒輪在不同位置的嚙合剛度會(huì)發(fā)生變化,因此我們對(duì)兩個(gè)齒輪進(jìn)行參數(shù)化旋轉(zhuǎn)以計(jì)算齒輪嚙合剛度的變化。指定副齒輪(θp)繞平面外的軸旋轉(zhuǎn)兩個(gè)嚙合周期。齒輪繞(θw)平面外的軸旋轉(zhuǎn)的定義如下: 其中,齒輪比 gr 為 1.5,θt 的扭轉(zhuǎn)值為 0.5°。
2967 1 1
CAE仿真學(xué)習(xí)菌 ??? 2年前
ADAMS耦合副的說明及使用 
一個(gè)耦合副,控制三個(gè)旋轉(zhuǎn)副時(shí),除作為驅(qū)動(dòng)的旋轉(zhuǎn)副外,剩余兩個(gè)存在一定的比例關(guān)系,且受驅(qū)動(dòng)旋轉(zhuǎn)副的約束,為了避免這種約束,可以建立兩個(gè)耦合副,這樣就可以實(shí)現(xiàn)三個(gè)旋轉(zhuǎn)副以任意比例旋轉(zhuǎn)了,如下圖: B.旋轉(zhuǎn)副與移動(dòng)副之間的耦合 旋轉(zhuǎn)副與移動(dòng)副之間的耦合類似于渦輪蝸桿的作用,由旋轉(zhuǎn)變?yōu)槠絼?dòng),同時(shí)傳動(dòng)關(guān)系也是滿足上文中的公式,但是這種傳動(dòng)關(guān)系中,旋轉(zhuǎn)角度為弧度單位。
5538 6
擺渡人張 ??? 2年前
旋轉(zhuǎn)機(jī)械流致噪聲解決方案 
葉輪所在的區(qū)域定義為運(yùn)動(dòng)域,采用旋轉(zhuǎn)坐標(biāo)系,其余區(qū)域設(shè)定為靜止區(qū)域。網(wǎng)格采用混合網(wǎng)格,葉輪旋轉(zhuǎn)域、進(jìn)出口管流道和殼體流道大部分區(qū)域采用全六面體結(jié)構(gòu)網(wǎng)格,進(jìn)出口拐角處采用四面體網(wǎng)格填充。
5056 2
聲學(xué)工程師小吳 ??? 2年前
RecurDyn建模常見問題:約束(Joint) 
4旋轉(zhuǎn)副(Revolute joint)定義motion,角速度如何定義,單位是什么?
2610 7 5
仿真客 ??? 3年前
履帶建模常見問題及解決方法-履帶嚙合問題 
答案:如果先鏈輪上定義旋轉(zhuǎn)副,再使用Basic Objeat Control對(duì)鏈輪進(jìn)行旋轉(zhuǎn),則需要重新定義旋轉(zhuǎn)副或者單擊Copy Base to Action功能,因?yàn)樵?em>旋轉(zhuǎn)鏈輪時(shí),旋轉(zhuǎn)副的Action marker也會(huì)變化,因此在仿真的第一步,鏈輪會(huì)在旋轉(zhuǎn)副的作用下回到原先干涉的位置,所以才會(huì)導(dǎo)致仿真失敗,同樣報(bào)錯(cuò)發(fā)生穿透。未完待續(xù)...
2304
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
滾珠絲杠高精度傳動(dòng)及(Python)自動(dòng)化建模 
2、定義材料屬性:該模型中,不考慮部件的變形,因此將所有部件視為剛體,只需要將材料屬性改為鋼(Steel)即可。 3、定義約束:根據(jù)運(yùn)動(dòng)關(guān)系對(duì)關(guān)鍵部件添加約束,絲杠(Shaft)與Ground旋轉(zhuǎn)副,循環(huán)器(Return Mechanism)與螺母(Nut)固定副,螺母上端固定裝置固定副,使用Cmotion(G)限制固定裝置的旋轉(zhuǎn)運(yùn)動(dòng)。
2938
杭州擬創(chuàng)(RecurDyn原廠) ??? 8月前
技術(shù)小貼士:如何將實(shí)驗(yàn)中測(cè)量的Spline數(shù)據(jù)應(yīng)用于RecurDyn? 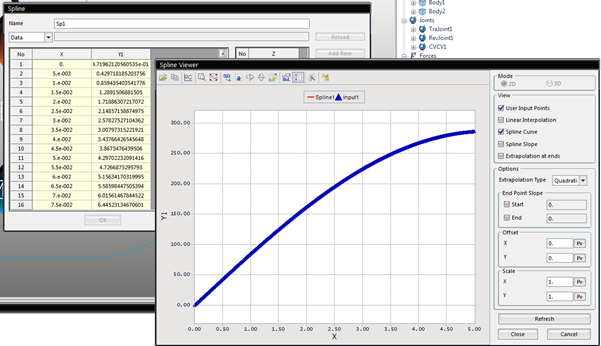
(以下示例是旋轉(zhuǎn)連接副運(yùn)動(dòng)的Spline數(shù)據(jù)。) 2. 其次, 將上面創(chuàng)建的Spline‘SP1’如下圖所示在Expression中定義。(在本例中,使用AKISPL函數(shù)定義。)
2505 2
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
案例57-輪胎性能模擬 
• 在第一個(gè)穩(wěn)態(tài)滾動(dòng)分析載荷步中,輪胎-道路接觸副的摩擦系數(shù)應(yīng)逐漸增大。可以在二維軸對(duì)稱輪胎模型中或在二維到三維分析過程中定義它。 • 輪胎-道路接觸副的允許彈性滑移(SLTO)實(shí)際常數(shù)是確定自由滾動(dòng)旋轉(zhuǎn)所需精度的主要因素。如果默認(rèn)的SLTO值不能提供所需的精度,請(qǐng)嘗試更改它。
4304 12 6
龍飛宇 ??? 3年前
RecurDyn建模常見問題:約束(Joint)
此時(shí)可以確認(rèn)創(chuàng)建連接副時(shí)一起創(chuàng)建的marker的Z軸(黃色)。 1. 對(duì)于旋轉(zhuǎn)連接副,根據(jù)+Z軸的基準(zhǔn),使用右手定律可以確認(rèn)+旋轉(zhuǎn)方向。 當(dāng)Z軸在右手拇指方向時(shí),手指纏繞的方向就是+旋轉(zhuǎn)方向。 2. 對(duì)于平移連接副,+Z軸的方向就是+方向。
2764 1
CAE仿真學(xué)習(xí)菌 ??? 2年前
RecurDyn建模常見問題:約束(Joint) 
此時(shí)可以確認(rèn)創(chuàng)建連接副時(shí)一起創(chuàng)建的marker的Z軸(黃色)。 1. 對(duì)于旋轉(zhuǎn)連接副,根據(jù)+Z軸的基準(zhǔn),使用右手定律可以確認(rèn)+旋轉(zhuǎn)方向。 當(dāng)Z軸在右手拇指方向時(shí),手指纏繞的方向就是+旋轉(zhuǎn)方向。 2. 對(duì)于平移連接副,+Z軸的方向就是+方向。
2585 3 4
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前

ANSYS Workbench多體動(dòng)力學(xué)實(shí)例——萬向節(jié) 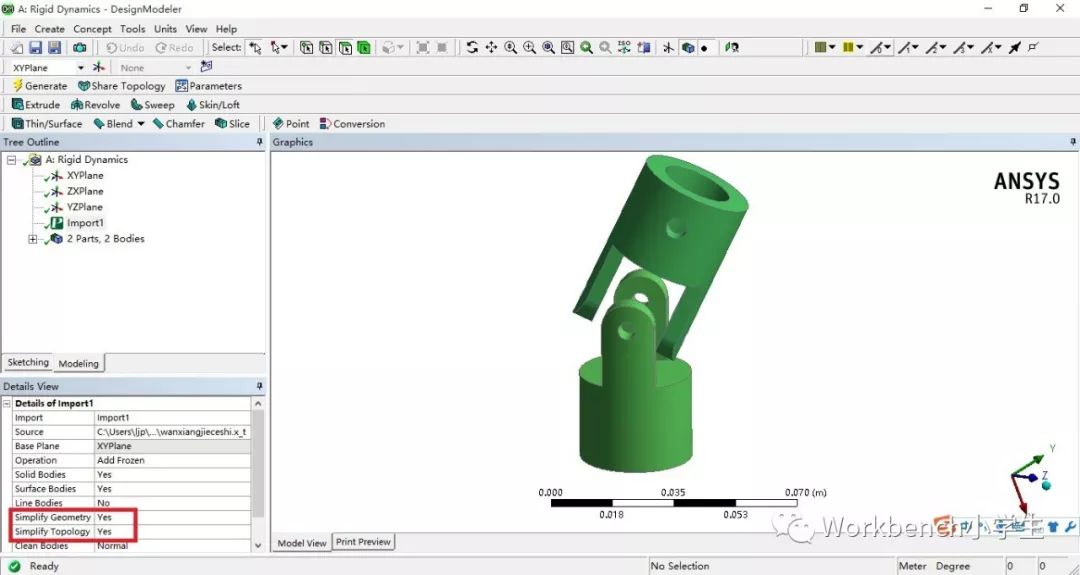
3.添加旋轉(zhuǎn)副注意:在此模型中,添加2個(gè)旋轉(zhuǎn)副,并設(shè)置為Body-ground類型,代表著兩個(gè)萬向節(jié)零件可以自轉(zhuǎn),來約束它的自由度,讀者也可以只施加1個(gè)旋轉(zhuǎn)副對(duì)比一下,就可以明白為什么要添加2個(gè)旋轉(zhuǎn)副(也可以使用其他類型的運(yùn)動(dòng)副),有些讀者在此模型中只添加一個(gè)萬向節(jié)副,然后插入Joint Load后并無法設(shè)置參數(shù),這是因?yàn)槿f向節(jié)副只是定義連接關(guān)系,并不代表可以直接驅(qū)動(dòng),當(dāng)添加完運(yùn)動(dòng)副,可以查看自由度數(shù)量
5166 3 1
CAE仿真學(xué)習(xí)菌 ??? 2年前
ADAMS行星齒輪機(jī)構(gòu)運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)仿真 
2.3 添加約束 行星齒輪機(jī)構(gòu)五處旋轉(zhuǎn)接觸,六處齒輪接觸,因此需要?jiǎng)?chuàng)建五個(gè)旋轉(zhuǎn)副、六個(gè)齒輪副和一個(gè)固定副,由于齒輪副的定義中規(guī)定兩個(gè)齒輪必須繞同一個(gè)構(gòu)件旋轉(zhuǎn),所以在建立齒輪的旋轉(zhuǎn)副時(shí)都是相對(duì)行星支架旋轉(zhuǎn),具體的各運(yùn)動(dòng)副如表1所示: 表1行星齒輪機(jī)構(gòu)運(yùn)動(dòng)約束 J1 內(nèi)齒輪與地面間固定副 J2 行星架和內(nèi)齒輪旋轉(zhuǎn)副
4603 8 1
劉曉東 ??? 2年前
20條/頁 
 72
72 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
