



技術分享︱多重參考系模型在風扇通風仿真中的自動化實現(xiàn):精度與效率的工程平衡 
,因參考系旋轉(zhuǎn)而受到的切向與法向偏轉(zhuǎn)效應。
1901
神工坊(高性能仿真) ??? 2月前
abaqus中怎么對同一參考點在不同分析步邊界條件使用不同局部坐標系?
1、abaqus中對邊界條件的設置是只允許使用一個坐標系么?2、設置第一個分析步使用局部坐標系1,在第二步取消激活,第二步時使用局部坐標系23、以上設置方法只是針對同一個剛體的參考點
2676 3
小程序用戶_HNT7beM6 ??? 1年前
abaqus中如何建立坐標系去描述輪胎運動時側(cè)偏角度的變化?
abaqus中如何建立坐標系去描述輪胎運動時側(cè)偏角度的變化?
2189 1
胡啦 ??? 1年前
Xflow如何建立不同的參考坐標系,對設置運動方向?
Xflow
1866 2
阿阿阿龍哦 ??? 3年前
STAR-CCM+風扇旋轉(zhuǎn)仿真-移動參考系法 

本課程主要講解了采用STAR-CCM+軟件進行旋轉(zhuǎn)機械的仿真,采用穩(wěn)態(tài)、移動參考系法。主要內(nèi)容包括如下:?導入網(wǎng)格 ?縮放網(wǎng)格?設置物理模型 ?創(chuàng)建移動參考系 ?設置初始條件 ?創(chuàng)建交界面 ?設置邊界條件 ?設置求解器參數(shù)和停止條件 ?可視化求解 ?報告監(jiān)視和繪圖 ?運行模擬 可視化結(jié)果
2881 37
johnchee ??? 8年前
fluent中的旋轉(zhuǎn)參考系 
介紹fluent中旋轉(zhuǎn)參考系的使用,以及RNG湍流模型
1831
CFD流 ??? 5年前
hypermesh可以建立隨節(jié)點運動的坐標系嗎?
在hypermesh中,能否建立一個隨選擇的節(jié)點移動和旋轉(zhuǎn)的坐標系
2529 2
quency ??? 1年前
力學筆記#4:結(jié)構(gòu)動力學和彈性動力學運動平衡方程的異同,順便簡述拉格朗日描述和歐拉描述 
參考資料見文后,文中的引用以“作者+頁碼”、“作者名年份+頁碼”等方式呈現(xiàn)。
2947
數(shù)峰青 ??? 1年前
基于機械系統(tǒng)動力學自動分析的多噴頭3D打印機運動學研究 
在打印過程中對2個噴頭的位移和速度曲線進行比較分析,運動過程平滑無突變,由曲線可以看出在0~10 s的時候位移比較大,這是因為2個噴頭要在工作臺上的參考點處,2個噴頭在空間上的位置不相同,所以在回參考點的時候位移不相同。在20 s的時候位移和速度曲線呈簡諧運動曲線。2個噴頭在同一工作面的時候,2個柱座下面的行星齒輪電機開始運動,圍繞工作臺作勻速運動,所以得到的曲線呈簡諧運動曲線。
4504 4
擺渡人張 ??? 2年前
基于DeltaD打印機的剛?cè)狁詈?em>運動學分析 
由坐標變換關系可知,相鄰量坐標之間可通過4個齊次坐標變換進行描述,關系表達式為:通過計算最終可得其表達式為:綜合上式得出運動方程為:其中:k表示坐標系的編號,c和s分別代表cos和sin的縮寫;Ttz為坐標系k沿Zk軸平移距離bk,使Xk和Xk+1軸相交;Trz為坐標系k的Xk軸繞Zk軸旋轉(zhuǎn)θk,使Xk軸和Xk+1軸共線;Ttx為坐標系k沿Xk+1軸平移距離ak,
4398 3
擺渡人張 ??? 2年前
2000坐標系與現(xiàn)行坐標系的關系及采用2000坐標系之后的一些變化 
WGS84坐標系與2000國家大地坐標系的關系 在定義上,2000國家大地坐標系與WGS84是一致的,即關于坐標系原點、尺度、定向及定向演變的定義都是相同的。兩個坐標系使用的參考橢球也非常相近,唯有扁率有微小差異。
2725
巖土聯(lián)盟 ??? 4年前
基于hypermesh與ansys apdl的聯(lián)合仿真——如何建立運動副 
最近重點學習了一下這方面的內(nèi)容,談談我的感想:1.使用hypermesh去建立運動副相比于workbench來說操作上的繁瑣程度高了不止一點,所以其實不是很懂學這個的意義在哪里;2.唯一覺得可能有用的在于后續(xù)去在dyna聯(lián)合仿真中去建立運動副有一定的參考意義,再者就是apdl本身在后處理方面的批量化于實時性的反饋比較好,這是我個人的理解;3.最后說說瑕疵吧,我用的hypermesh
3821 28 9
仿真學習cae ??? 1年前
基于ADAMS的點按手法運動仿真 
ADAMS采用世界上廣泛流行的多剛體系統(tǒng)動力學理論中的拉格朗日方程方法,選取系統(tǒng)內(nèi)每個剛體質(zhì)心在慣性參考系中的3個直角坐標和確定剛性方位的3個歐拉角作為笛卡爾廣義坐標,用帶乘子的拉格朗日方程處理具有多余坐標的完整約束系統(tǒng)或非完整約束系統(tǒng),導出以笛卡爾廣義坐標為變量的運動學方程。
3011 2
擺渡人張 ??? 2年前
離心式壓縮機仿真案例 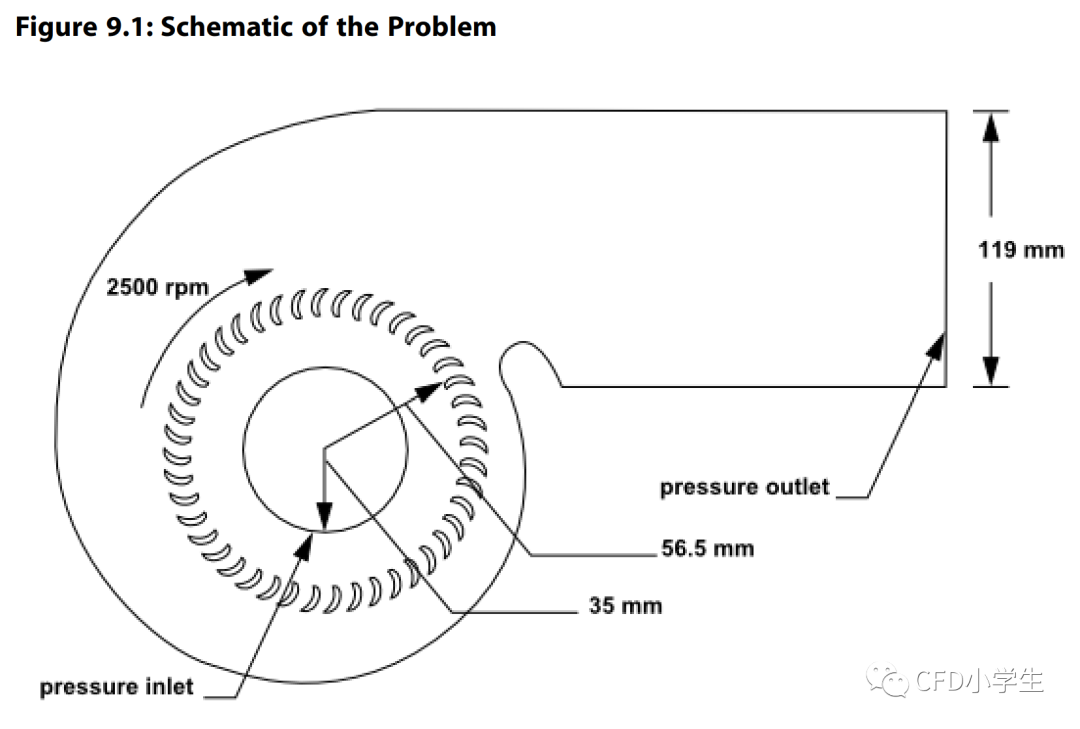
;注,MRF方法不能夠考慮移動區(qū)域?qū)τ谙噜弲^(qū)域(可能是移動或靜止)的相對運動,計算網(wǎng)格保持恒定不變,這是一種類似于在某一位置凍結(jié)(analogous to freezing)運動部件運動,并觀察轉(zhuǎn)子在某一位置的瞬態(tài)連續(xù)流場,因此MRF通常被成為是凍結(jié)轉(zhuǎn)子方法“frozen rotor approach”; 2、MRF Interface Formulation;MRF形式被應用在交界面處將取決于使用的速度形式
2787 2 1
我愛汽輪機仿真 ??? 2年前
《經(jīng)典力學》札記 
在邏輯上,拉格朗日方程如果可以有廣泛的應用價值,必須可以在任意坐標系求解。非常遺憾,很多教材沒有給出這個變換的證明;或者提到了,但沒有明確點明其重要性(和意義)。如果我們可以在任意坐標下計算這些問題,那么我們可以選擇最合適的坐標系/參考系,從而得到更多的守恒量。這些守恒量可以讓我們的問題大大化簡。拉格朗日的第三個優(yōu)勢在于,它對應最小作用量原理——即哈密頓原理。
3023 21 20
仿真客 ??? 3年前
數(shù)控機床高逼格編程術語,多少要學幾句
8)參考位置( Reference Position )機床啟動用的沿著坐標軸上的一個固定點,它可以用機床坐標原點為參考基準。 9)絕對尺寸(Absolute Dimension)/絕對坐標值(Absolute Coordinates)距一坐標系原點的直線距離或角度。
2301
數(shù)控編程網(wǎng) ??? 4年前
基于動參考系法(MRF/滑移網(wǎng)格)+DPM模型的植保無人機螺旋槳下洗和噴霧仿真 
1、掌握DPM模型的參數(shù)設置,理解參數(shù)含義。包括:噴霧仿真的思路,模型的簡化;DPM模型的設置;注射器的設置,包括:類型,顆粒類型,材料,噴嘴參數(shù)的設置等;DPM壁面模型的設置與講解;2、掌握螺旋槳(旋轉(zhuǎn)機械)的穩(wěn)態(tài)和液滴軌跡追蹤仿真。包括:SCDM的幾何創(chuàng)建;Fluent Meshing 的不共節(jié)點多區(qū)域網(wǎng)格的劃分;MRF法計算旋轉(zhuǎn)機械(螺旋槳)的方法,包括:
1352 2
無人機工坊 ??? 1年前
使用 COMSOL 對慣性傳感器進行仿真 
在銀河系上方,有一個箭頭指向其中一個小點,上面毫無意義的寫著幾個文字:“你在這里”。一個沒有任何參照系的導航儀示例。就像天空中的星星一樣,它確實隱含了一些關于導航(還有生活)的相對論本質(zhì)的真理。也許它給我們的主要教訓是,一個物體的位置只有在與它周圍的空間相關的情況下才能進行有用的描述。在導航中,這個空間就是參考系。當我們在道路地圖上繪制路線時,是在一個二維參考系中導航。
2747
我是小能 ??? 3年前
基于ANSYS軟件的1+6鋼絲繩網(wǎng)格劃分策略及仿真 
由于提取接觸線上各節(jié)點在笛卡爾坐標系下的位移很難描述中心絲和側(cè)絲的相對運動狀態(tài),因此提取接觸線上各節(jié)點在柱坐標下的運動位移,1+6鋼絲繩內(nèi)部中心絲與側(cè)絲的相對運動主要通過周向相對位移和軸向相對位移體現(xiàn)。約束扭轉(zhuǎn)和自由扭轉(zhuǎn)時1+6鋼絲繩中心絲(IW)和側(cè)絲(OW)接觸線的周向相對位移和軸向相對位移沿鋼絲繩軸向的變化如圖7所示。
5821 3 5
Infiniteelements ??? 2年前
三自由度機械臂運動學分析+仿真 
建立坐標系 1正運動學分析 采用標準的D-h法進行機械腿模型分析: 將連桿坐標系的原點建立在連桿的關節(jié)連桿末端。 一、建立D-H連桿坐標系的原則 1.Z,軸沿關節(jié)軸i+1的軸向。 2.原點O為Zi.,與Zi軸的交點或其公垂線與關節(jié)軸Zi的交點。3.Xi軸沿Zi與Zi軸的公垂線方向,由關節(jié)軸i指向關節(jié)軸i+1。
3993
余俊煒 ??? 2年前
20條/頁 
 84
84 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
