技術(shù)分享︱多重參考系模型在風(fēng)扇通風(fēng)仿真中的自動(dòng)化實(shí)現(xiàn):精度與效率的工程平衡


引言
在廠房通風(fēng)、數(shù)據(jù)中心散熱等封閉空間的流體力學(xué)仿真中,旋轉(zhuǎn)風(fēng)扇對(duì)全流場(chǎng)流速分布的驅(qū)動(dòng)作用是計(jì)算的核心。傳統(tǒng)的仿真工作流通常依賴(lài)人工進(jìn)行幾何處理、網(wǎng)格劃分與求解器設(shè)置,難以滿(mǎn)足海量工況的快速評(píng)估需求。
為解決這一痛點(diǎn),神工坊?技術(shù)團(tuán)隊(duì)開(kāi)發(fā)了一套基于 HPC 集群的SimForge?仿真應(yīng)用平臺(tái)。該平臺(tái)將底層復(fù)雜的網(wǎng)格拓?fù)渑c物理模型封裝,實(shí)現(xiàn)了從參數(shù)輸入到結(jié)果輸出的全自動(dòng)化。在構(gòu)建該平臺(tái)的核心求解邏輯時(shí),如何在“計(jì)算精度”與“求解效率”之間取得最佳平衡,是算法選型的關(guān)鍵。
01 MRF模型選型論證
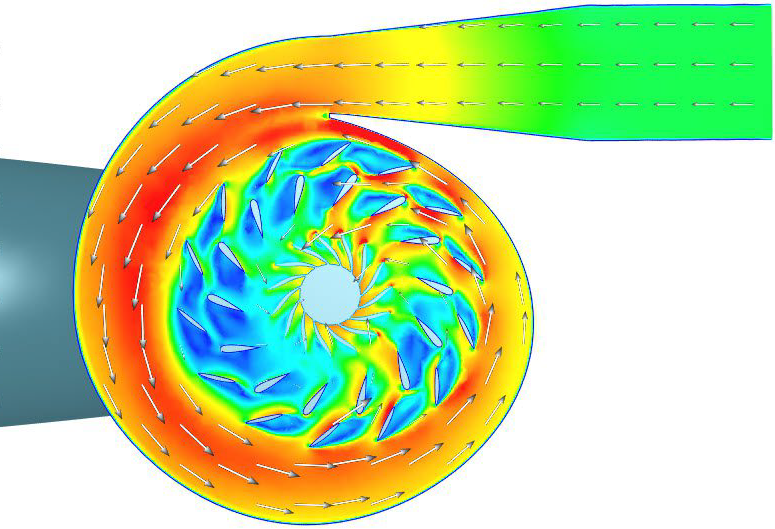
多重參考系模型應(yīng)用示例
在處理包含旋轉(zhuǎn)機(jī)械的計(jì)算流體力學(xué)問(wèn)題時(shí),靜止域與旋轉(zhuǎn)域動(dòng)靜干涉邊界的處理是求解的核心難點(diǎn)。當(dāng)前工業(yè)界針對(duì)該類(lèi)問(wèn)題的主流處理模型主要分為兩類(lèi):瞬態(tài)滑移網(wǎng)格模型(Sliding Mesh Model, SMM)與穩(wěn)態(tài)多重參考系模型(Multiple Reference Frame, MRF)。
瞬態(tài)滑移網(wǎng)格模型(SMM)基于網(wǎng)格的真實(shí)物理運(yùn)動(dòng)進(jìn)行非定常求解,能夠高保真地捕捉轉(zhuǎn)子與定子交互時(shí)的強(qiáng)瞬態(tài)氣動(dòng)效應(yīng)(如尾跡脫落與流場(chǎng)脈動(dòng))。然而,SMM 求解嚴(yán)格受限于 Courant 穩(wěn)定性條件,要求極小的物理時(shí)間步長(zhǎng)。這導(dǎo)致計(jì)算資源與時(shí)間成本呈指數(shù)級(jí)增長(zhǎng),難以匹配 SaaS 平臺(tái)對(duì)高并發(fā)與計(jì)算結(jié)果高效流轉(zhuǎn)的工程需求。
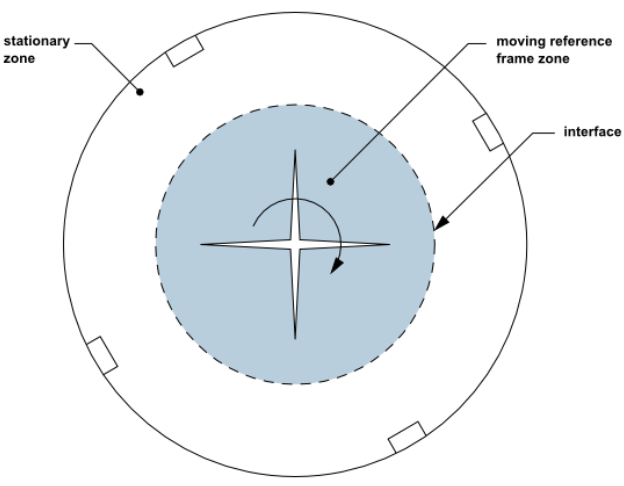
多重參考系模型(MRF)則采用穩(wěn)態(tài)近似策略,將全局計(jì)算域在空間上嚴(yán)格解耦為靜止域(如廠房宏觀環(huán)境)與旋轉(zhuǎn)域(如風(fēng)扇葉輪近場(chǎng)區(qū)域)。在數(shù)學(xué)處理上,靜止域內(nèi)的納維-斯托克斯(Navier-Stokes)方程在絕對(duì)參考系下封閉求解;而旋轉(zhuǎn)域內(nèi)的控制方程則轉(zhuǎn)換至跟隨轉(zhuǎn)子同步旋轉(zhuǎn)的相對(duì)參考系下求解,最終通過(guò)網(wǎng)格交界面實(shí)現(xiàn)動(dòng)量與質(zhì)量通量的守恒傳遞。
單旋轉(zhuǎn)葉輪幾何模型
基于宏觀封閉空間通風(fēng)的工程場(chǎng)景特性,全流場(chǎng)的時(shí)間平均分布特征(如宏觀風(fēng)流分布、有效風(fēng)速覆蓋率)遠(yuǎn)比局部的強(qiáng)瞬態(tài)動(dòng)靜干涉現(xiàn)象更為關(guān)鍵。因此,本平臺(tái)底層求解器選型確立為 MRF 模型,并由此引出“冰凍轉(zhuǎn)子法”的工程論證。
在物理等效性上,MRF 模型不考慮旋轉(zhuǎn)域與相鄰靜止域之間的真實(shí)相對(duì)位移,相當(dāng)于將轉(zhuǎn)動(dòng)部件在其某一瞬態(tài)幾何相位上“凍結(jié)”,進(jìn)而求解該位置下的穩(wěn)態(tài)流場(chǎng)。基于此物理近似特征,該理論方法在工程計(jì)算中被稱(chēng)為“冰凍轉(zhuǎn)子法”(Frozen Rotor Approach)。該方法在確保宏觀流場(chǎng)計(jì)算精度的前提下,大幅降低了計(jì)算開(kāi)銷(xiāo),實(shí)現(xiàn)了求解效率的最大化,是支撐大規(guī)模云端自動(dòng)化仿真落地的理想核心算法。
02 速度變換與算子映射
基于前述的MRF模型(冰凍轉(zhuǎn)子法),旋轉(zhuǎn)域與靜止域采用不同的參考系描述。為實(shí)現(xiàn)靜止網(wǎng)格上的旋轉(zhuǎn)效應(yīng)模擬,其核心在于速度場(chǎng)的參考系變換,以及動(dòng)量方程的重構(gòu)。與瞬態(tài)滑移網(wǎng)格方法不同,MRF 求解器并非物理移動(dòng)網(wǎng)格,而是通過(guò)算子對(duì)控制方程進(jìn)行運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)變換,將旋轉(zhuǎn)坐標(biāo)系下的慣性力(如科里奧利力、離心力) 以源項(xiàng)形式引入。
2.1 相對(duì)速度公式化與附加源項(xiàng)算子
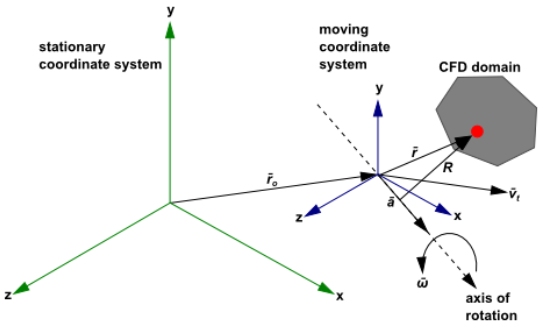
靜止與運(yùn)動(dòng)參考系
在旋轉(zhuǎn)非慣性系中,流體質(zhì)點(diǎn)的絕對(duì)速度v 與相對(duì)速度r 之間由牽連速度算子聯(lián)系:
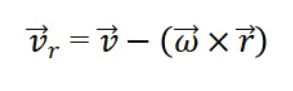
其中,ω為旋轉(zhuǎn)角速度矢量,r為位置矢量。
若以相對(duì)速度v作為動(dòng)量方程的求解變量,由于參考系的旋轉(zhuǎn),必須在動(dòng)量方程中顯式引入兩個(gè)附加的體積力源項(xiàng)算子,以維持力學(xué)平衡。其一為科里奧利力算子(Coriolis Force Operator),表達(dá)式為

該算子表征流體在旋轉(zhuǎn)參考系中相對(duì)運(yùn)動(dòng)時(shí),因參考系旋轉(zhuǎn)而受到的切向與法向偏轉(zhuǎn)效應(yīng)。其二為離心力算子(Centrifugal Force Operator),表達(dá)式為

該算子表征流體隨參考系轉(zhuǎn)動(dòng)時(shí),受到的背離旋轉(zhuǎn)軸向外的徑向慣性力。

2.2 絕對(duì)速度公式與算子簡(jiǎn)化
在風(fēng)扇全流場(chǎng)模擬中,主流底層求解器通常默認(rèn)采用絕對(duì)速度公式化。該方法以絕對(duì)速度v作為求解變量,但在計(jì)算跨越網(wǎng)格面的對(duì)流質(zhì)量通量時(shí)依然使用相對(duì)速度v。
通過(guò)嚴(yán)格的代數(shù)推導(dǎo),上述復(fù)雜的科里奧利力算子與離心力算子可以被合并與化簡(jiǎn),最終在動(dòng)量方程中表現(xiàn)為單一的簡(jiǎn)化旋轉(zhuǎn)源項(xiàng)算子

化簡(jiǎn)后的穩(wěn)態(tài)動(dòng)量方程形式為:

該公式化的工程優(yōu)勢(shì)在于,算子的簡(jiǎn)化不僅降低了計(jì)算復(fù)雜度,更重要的是,在具有強(qiáng)烈旋流的區(qū)域(如風(fēng)扇尾流區(qū)),絕對(duì)速度公式化能夠有效避免離散化過(guò)程中的數(shù)值耗散,從而顯著提高全場(chǎng)求解的魯棒性和精度。
2.3 MRF交界面公式化與通量傳遞
由于計(jì)算域被劃分為靜止域(如廠房)和旋轉(zhuǎn)域(如風(fēng)扇葉輪),兩者的控制方程參考系不同。實(shí)現(xiàn)“冰凍轉(zhuǎn)子法”的關(guān)鍵在于交界面(Interface)處的數(shù)據(jù)傳遞。
首先是局部參考系轉(zhuǎn)換算子的應(yīng)用。當(dāng)?shù)讓忧蠼馄髟谛D(zhuǎn)域邊界計(jì)算通量并向靜止域傳遞時(shí),系統(tǒng)會(huì)自動(dòng)應(yīng)用速度矢量的空間轉(zhuǎn)換算子。
其次是通量守恒的嚴(yán)格保證。無(wú)論是采用相對(duì)速度還是絕對(duì)速度公式化,流經(jīng)交界面的質(zhì)量通量(Mass flux)、動(dòng)量通量(Momentum flux)和其他標(biāo)量通量,都會(huì)通過(guò)

關(guān)系嚴(yán)格轉(zhuǎn)換為相鄰域所在參考系下的表達(dá)形式,確保物理量在非一致性(Non-conformal)網(wǎng)格交界面上的絕對(duì)守恒。
03 自動(dòng)化實(shí)現(xiàn)與調(diào)度
在 SaaS 平臺(tái)的后臺(tái)架構(gòu)中,上述多重參考系理論通過(guò) Python 腳本與底層求解器的高效交互得以實(shí)現(xiàn)。該自動(dòng)化工作流精確映射了 MRF 模型的關(guān)鍵邊界設(shè)置與求解需求,其核心落地流程涵蓋以下三個(gè)技術(shù)環(huán)節(jié)。
3.1 區(qū)域智能識(shí)別與交界面構(gòu)建
算法自動(dòng)解析幾何空間的拓?fù)涮卣鳎瑢⑷钟?jì)算域自適應(yīng)劃分為靜止域與多個(gè)相互獨(dú)立的旋轉(zhuǎn)域。在此基礎(chǔ)上,后臺(tái)腳本自動(dòng)生成底層交互指令,創(chuàng)建非一致性網(wǎng)格交界面。該機(jī)制確保了動(dòng)量通量與質(zhì)量通量在不同參考系邊界處的數(shù)據(jù)插值與嚴(yán)格守恒傳遞。
3.2 運(yùn)動(dòng)參考系的動(dòng)態(tài)映射
針對(duì)多風(fēng)扇陣列的復(fù)雜工況,自動(dòng)化腳本動(dòng)態(tài)讀取前端輸入的風(fēng)扇空間坐標(biāo)與轉(zhuǎn)速參數(shù),精準(zhǔn)定位每個(gè)轉(zhuǎn)子的旋轉(zhuǎn)軸與原點(diǎn)。通過(guò)這一映射過(guò)程,旋轉(zhuǎn)角速度 ω 的物理定義被精確轉(zhuǎn)化為底層求解器所識(shí)別的運(yùn)動(dòng)參考系邊界條件,實(shí)現(xiàn)了非慣性系算子的自動(dòng)施加。
3.3 HPC 并行調(diào)度與高效求解
針對(duì)多風(fēng)扇流場(chǎng)引入的千萬(wàn)級(jí)網(wǎng)格規(guī)模,平臺(tái)架構(gòu)在底層深度集成了 Slurm 等高性能計(jì)算集群調(diào)度系統(tǒng)。通過(guò)腳本動(dòng)態(tài)配置節(jié)點(diǎn)資源與通訊文件,系統(tǒng)調(diào)用 OpenMPI 驅(qū)動(dòng)底層 CFD 求解器執(zhí)行多節(jié)點(diǎn)跨核并行計(jì)算。該架構(gòu)在保證流場(chǎng)宏觀計(jì)算精度的前提下,實(shí)現(xiàn)了仿真任務(wù)的高并發(fā)與高效流轉(zhuǎn)。
04 結(jié)語(yǔ)
本文從工程痛點(diǎn)出發(fā),深度解構(gòu)了 SaaS 化通風(fēng)仿真平臺(tái)底層的核心計(jì)算理論。通過(guò)引入穩(wěn)態(tài)多重參考系(MRF)模型,并利用非慣性系下速度場(chǎng)與動(dòng)量方程的算子變換,神工坊?技術(shù)團(tuán)隊(duì)成功在計(jì)算精度與求解效率之間找到了最優(yōu)解。結(jié)合 HPC 集群與 Python 自動(dòng)化腳本,復(fù)雜的物理算子與底層交互被完全黑盒化。這不僅大幅降低了多風(fēng)扇聯(lián)合仿真的門(mén)檻,也為同類(lèi)流體計(jì)算的 SaaS 化落地提供了可靠的技術(shù)參考。






















工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP




