如今,大多數人在駕車旅行時都會連接 GPS 導航設備。但當車輛進入地下通道或高樓之間時,GPS 信號可能會中斷,這就是許多車輛、手機等設備都帶有慣性測量單元或慣性傳感器的原因。慣性傳感器使用的陀螺儀和加速度計非常小巧并且精確度高,用于確定與地球正交軸 x、y 和 z 相關的運動。使用 COMSOL Multiphysics? 軟件,我們可以對慣性傳感器的組件(包括 MEMS 陀螺儀和加速度計)進行建模。
“你在這里”遇到“就這樣結束了”
想象一下,一片暗黑色的天空中布滿了成千上萬的白點,它們排列成的形狀顯示出它們正處在銀河系。在銀河系上方,有一個箭頭指向其中一個小點,上面毫無意義的寫著幾個文字:“你在這里”。

一個沒有任何參照系的導航儀示例。
就像天空中的星星一樣,它確實隱含了一些關于導航(還有生活)的相對論本質的真理。也許它給我們的主要教訓是,一個物體的位置只有在與它周圍的空間相關的情況下才能進行有用的描述。在導航中,這個空間就是參考系。
當我們在道路地圖上繪制路線時,是在一個二維參考系中導航。僅憑一張地圖無法知道我們是在上坡還是下坡,或者我們的車輛是否有翻車的風險。配備慣性傳感器的導航系統可以通過測量線加速度和角加速度來計算車輛在三維空間中的軌跡。有了三個分別沿 x 軸、y 軸或 z 軸定向的加速度計,我們就可以跟蹤三維空間中的線性運動。同樣,用三個分別沿 x 軸、y 軸或 z 軸的定向陀螺儀,我們就可以測量三維空間中的旋轉。
腦袋里的石頭?它們是你的加速度計的一部分
如果你做了一件蠢事,你可能會被問“你腦袋里有石頭嗎?”如果發生這種情況,你可以如實回答:是的,我們都有!即使是傻瓜也應該知道它們非常重要!每一種脊椎動物的身體里都含有主要由碳酸鈣(石灰石的主要成分)組成的微小耳石 。我們腦袋里的這些石頭是身體自然加速度計不可或缺的一部分。
加速度計由一個質量塊組成,懸掛在與外殼相連的柔性結構上。當外殼加速時,質量塊也會加速,從而對懸架造成可以測量的應變。對于我們耳朵內的加速度計而言,質量塊是一束耳石。這束耳石附著在一層薄膜上,薄膜懸掛在細微的毛發和黏附的神經上,當質量發生變化時,這些神經會捕捉到電信號變化。這個有機的加速度計附著在我們的內耳結構上,是人體的參照系。
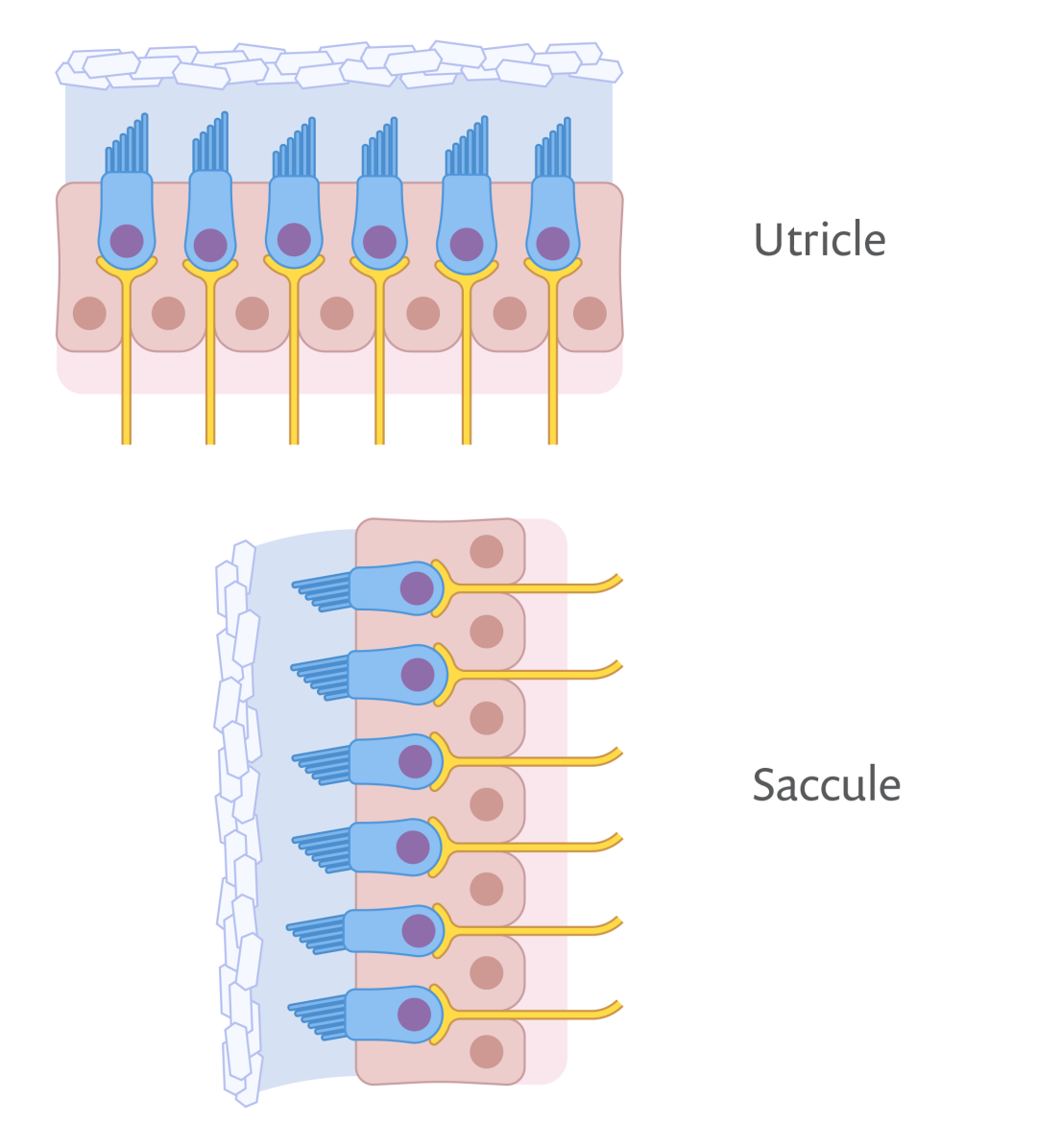
人的每只耳朵里都有一個水平放置的橢圓囊和一個垂直放置的球囊。每一個微型囊結構都包含一個懸浮的質量塊,它會刺激附著的神經對加速度作出響應。
當我們的身體突然移動時,質量塊的位移會提醒神經有跌倒的可能性。因此,我們的神經可以探測到身體的運動,即使其他感覺器官(例如眼睛或耳朵),失去了它們的參照系。表面微機械加速度計為設備和車輛提供了類似的功能。
MEMS 加速度計仿真“積木”
本文介紹的教程模型演示了如何使用 COMSOL 軟件 MEMS 模塊的機電 多物理場接口對表面微機械加速度計進行建模。該模型由三個子組件組成:質量塊、支撐質量塊的錨定彈簧和電極陣列。瀏覽下列圖片查看所有三個子組件以及完整模型。
當器件受到加速度時,質量塊將發生位移,從而改變固定電極和移動電極之間的電容。電容的變化與加速度成正比。
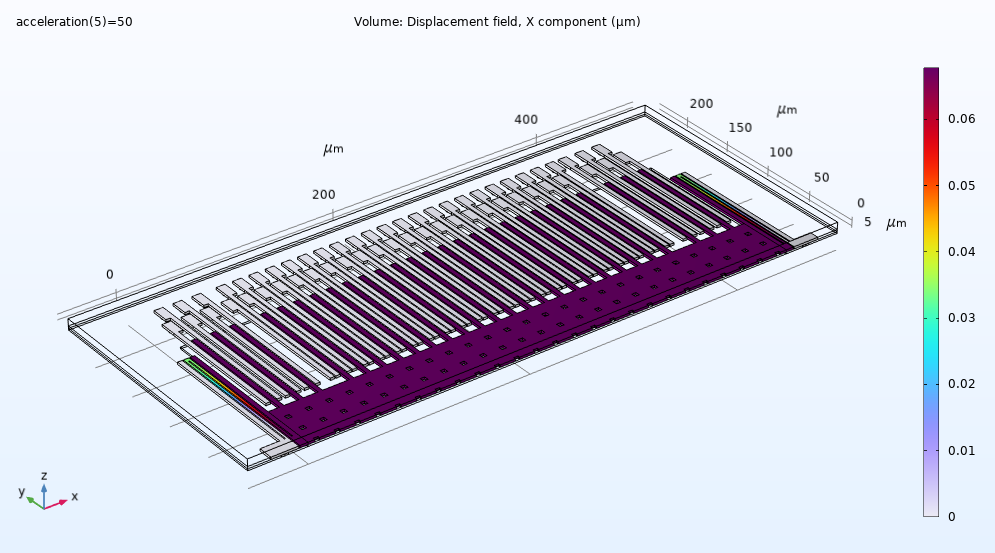
施加 50 g 加速度的位移。在這個示例中,質量塊移動了大約 0.07μm。
在定義模型時,我們可以指定質量塊、彈簧和電極三個核心組件的尺寸、方向和其他屬性。還可以通過調整這些模塊化構建塊(也稱為子序列)的關鍵屬性值來測試不同的設計選項。這種模塊化支持模擬原型機和加速度計的配置和測試。
加速度計模型的模塊化“構建塊”電極陣列。
重新設計的陣列是通過調整關鍵屬性從相同的模塊化 子序列 構建出來的。
音叉陀螺儀的起伏
就像大自然為一些動物配備了加速度計一樣,另一些動物也自帶陀螺儀!家蠅、蚊子和其他飛蟲有兩個稱為 平衡棒 的附件,如下圖中鶴蠅的翅膀后面所示:
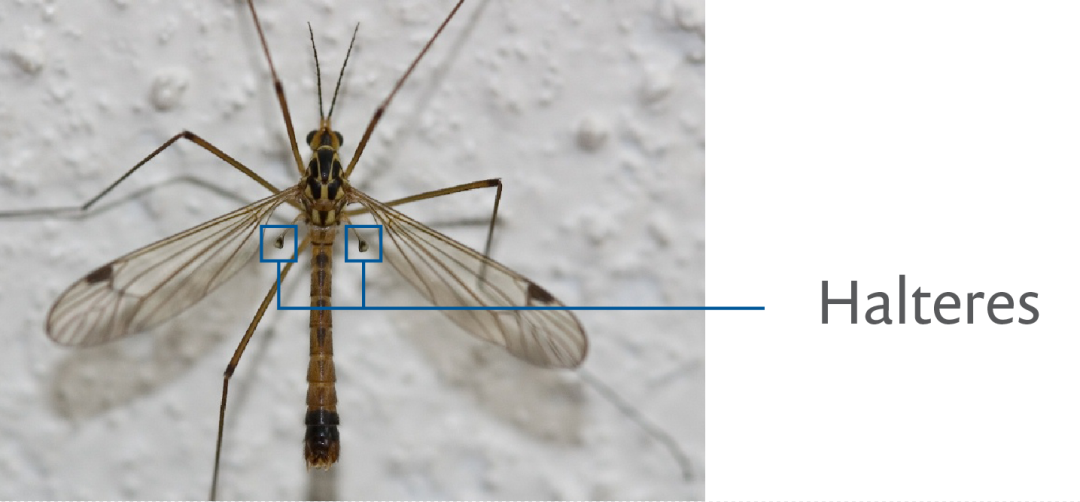
鶴蠅的俯視圖,顯示了平衡棒的位置。圖片來自Andre Vrijens,通過Wikimedia Commons 獲得許可(CC BY 3.0)。
昆蟲的平衡棒隨著它的翅膀迅速地拍打。在水平飛行中,平衡棒的運動沿著向上和向下的路徑進行。但是當昆蟲傾斜它的身體時,平衡棒的路徑會因科里奧利效應而發生變化,向左右移動和上下移動。昆蟲通過它們對附著的毛發施加的壓力來感知平衡棒的移動。這個信息使它們能夠控制相對于它的飛行路徑的方向。
壓電速率陀螺儀就是根據類似的原理工作的。接下來,我們來探索一個陀螺儀模型,了解它是如何工作的。
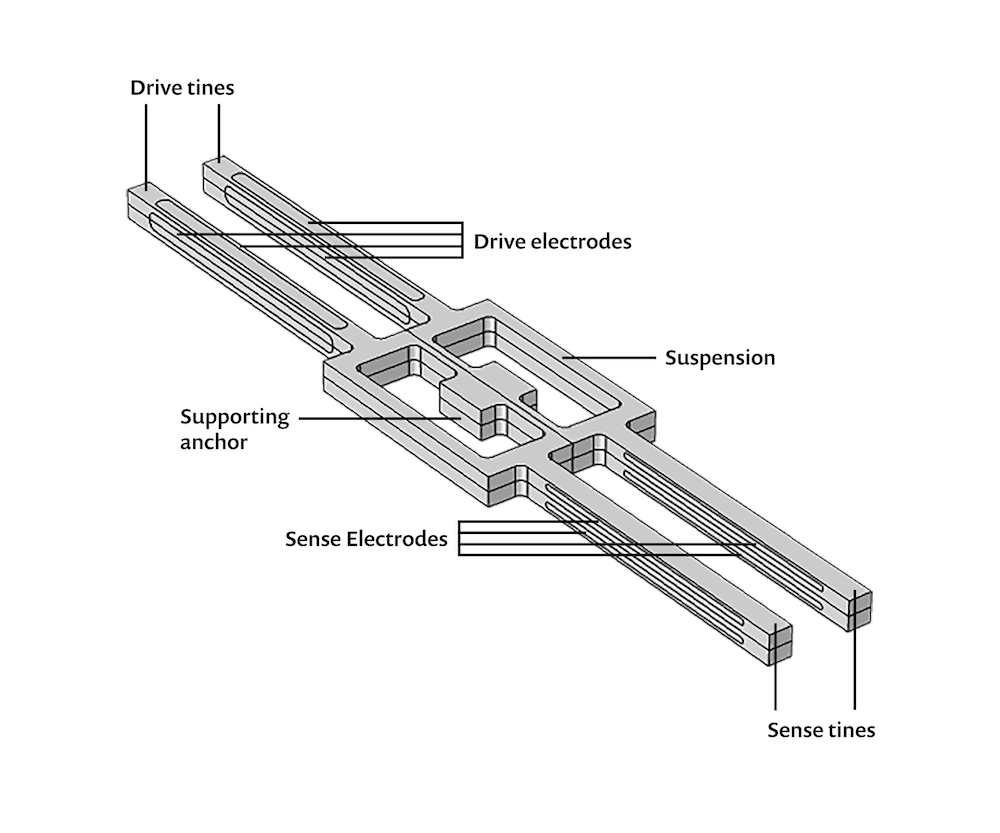
模擬的音叉陀螺儀示意圖,顯示了通過器件中心和關鍵組件的對稱平面。
陀螺儀中心的矩形結構是它的懸架。該組件的支撐錨固定在安裝陀螺儀的器件上。兩對突出的組件是驅動尖齒和感應尖齒。兩組尖齒上的電極使它們能夠提供有關器件方向的有用數據。
為了解釋這個器件是如何工作的,我們來考慮當器件相對于它的參考坐標靜止或勻速運動(沒有線性或旋轉加速度的運動)時尖齒的行為。我們將研究當器件旋轉時尖齒的行為如何變化。施加到驅動尖頭的電信號導致感應尖頭在 xy 平面中以它們的諧振頻率振動。當設備繞 y 軸旋轉時,科里奧利力會導致面外振動,如下圖所示。
圖中當器件勻速運動時施加電流會導致尖齒沿 xy 平面振動
請注意,驅動尖齒和感應尖齒具有不同的諧振頻率。當陀螺儀工作時,驅動齒中的電極通過反向壓電效應刺激它們以共振頻率振動。當整個設備繞 y 軸旋轉時,產生的科里奧利力將激發傳感尖齒在平面外振動,這種運動將通過直接壓電效應在傳感尖的電極中產生電流。
圖中顯示了器件勻速運動的兩個曲線,沒有加速或旋轉。請注意,尖齒在 xy 平面中振動。
圖中設備繞 y 軸旋轉,導致尖齒在 xy 平面外振動。
在這兩幅圖中,左側的圖表顯示的顏色變化用于指示位移的大小,而右側顯示了叉齒在空間中的實際位移。
動畫顯示了當器件圍繞 y 軸旋轉時尖齒的行為,導致面外振動。左邊的顏色變化表示位移的大小,而右邊的圖像顯示了空間中的運動。
本文來自:COMSOL博客


























