



[CATIA DMU——Kinematic] CATIA DMU運動仿真案例分享+DMU運動仿真教程。 ![[CATIA DMU——Kinematic] CATIA DMU運動仿真案例分享+DMU運動仿真教程。](https://mmbiz.qpic.cn/mmbiz_gif/qEsbqRTFJZDS8icoJURqjRIlic7yVBq0lQiaHt3rYCblDHeAl5oyojAAldmnqd2J14r3cj2wClXUibP2icQibLUcul5w/640?wx_fmt=gif)
在CATIA軟件DMU KIN模塊優(yōu)雅的做一個運動仿真案例?如下簡單介紹下本案例,運動副添加以及模擬仿真過程(三維建模過于簡單,不做介紹,如果需要模型,可以聯(lián)系作者獲取。)
3794 6 2
張偉一 ??? 3年前
ADAMS履帶小車仿真 
經(jīng)過計算后,兩驅(qū)動輪在相同的驅(qū)動下使履帶小車向前運動,具體如下: 然后改變驅(qū)動方式:保持右側(cè)驅(qū)動不變,將左側(cè)的驅(qū)動設(shè)置為0,也就是左側(cè)鏈輪不發(fā)生相對轉(zhuǎn)動,經(jīng)過仿真,具體如下所示,履帶小車以左側(cè)履帶為圓心進(jìn)行繞圓運動。
3370 2
擺渡人張 ??? 2年前
基于ADAMS的點按手法運動仿真 
虛擬樣機仿真分析軟件ADAMS[1],是對機械系統(tǒng)的運動學(xué)和動力學(xué)進(jìn)行仿真計算的商用軟件。用戶可以利用各種模塊方便地建立機械系統(tǒng)虛擬樣機,并通過強大的后處理模塊對參數(shù)的測量結(jié)果進(jìn)行處理與分析。
3012 2
擺渡人張 ??? 2年前
基于ADAMS的助老起升裝置的運動學(xué)仿真分析 
2.4 仿真設(shè)置 最后進(jìn)入 Simulation 模塊,根據(jù)模型的實際運動 情況對仿真時長及步數(shù)進(jìn)行設(shè)置,進(jìn)而得到相關(guān)運動 參數(shù)曲線,自此完成 ADAMS 環(huán)境下模型的設(shè)置,如 圖 4 所示。
2602 5
擺渡人張 ??? 2年前
ADAMS行星齒輪機構(gòu)運動學(xué)及動力學(xué)仿真 
動力學(xué)仿真 3.1 模型修改 對于行星齒輪機構(gòu)運動學(xué)仿真和動力學(xué)仿真之間的區(qū)別在于齒輪間相互關(guān)系的建立,在運動學(xué)仿真中齒輪間靠齒輪副連接,相互之間的運動與理論值高度吻合。動力學(xué)仿真時齒輪間采用接觸的方式相互連接,在動力學(xué)仿真中會因為齒輪間接觸剛度和間隙,而使仿真結(jié)果和理論計算值產(chǎn)生一定的出入,但是更加真實。
4603 8 1
劉曉東 ??? 2年前
渦旋壓縮機的虛擬建模與運動仿真
關(guān)鍵詞: 渦旋壓縮機; 虛擬建模; 運動仿真 前言:虛擬樣機( Visual Prototype) 技術(shù)是通過計算機等技術(shù)手段把產(chǎn)品資料集成到一個可視化環(huán)境中,實現(xiàn)產(chǎn)品的仿真分析。使用系統(tǒng)仿真軟件,可以在各種虛擬環(huán)境中真實地模擬系統(tǒng)的運動,不斷修改設(shè)計缺陷及改進(jìn)系統(tǒng),直至獲得最優(yōu)設(shè)計方案,最終做出比較理想的物理樣機[1]。
2661
我愛汽輪機仿真 ??? 2年前
基于Matlab Simulink的三軸運動平臺剛?cè)狁詈?em>仿真 
關(guān)鍵詞:Simulink;三軸運動平臺;模態(tài)綜合法;剛?cè)狁詈希粍討B(tài)仿真;三軸運動平臺作為精密制造、測試模擬與高端裝備的關(guān)鍵部件,其動態(tài)性能直接影響系統(tǒng)的定位精度與運行穩(wěn)定性。多體動力學(xué)仿真方法通常將平臺視為純剛性體,忽略結(jié)構(gòu)柔性在高速、高加速運動下引發(fā)的彈性變形與振動,導(dǎo)致仿真結(jié)果與實際效果之間存在顯著偏差,難以有效指導(dǎo)高精度設(shè)計與控制策略優(yōu)化。
1057
320科技工作室 ??? 1月前
六軸碼垛機器人admas正逆運動學(xué)仿真 
2000毫秒,仿真步數(shù)要設(shè)為500,利用仿真的軌跡跟蹤功能繪制出如圖5-14所示運動軌跡。
2373
余俊煒 ??? 3年前
某型號接觸器--開關(guān)的觸頭電弧運動仿真分析 
因此,研究接觸器觸頭電弧運動特性,對接觸器的設(shè)計與改進(jìn)至關(guān)重要。2.計算難點 傳統(tǒng)對電弧的研究主要以實驗為主,但電弧運動涉及流場、熱場和電磁場等復(fù)雜變化過程,實驗研究難度較大。隨著計算機計算性能和仿真軟件技術(shù)的進(jìn)步,電弧仿真逐漸成為可能,且仿真結(jié)果的準(zhǔn)確性大大提高。通過仿真分析,可以在虛擬環(huán)境中模擬電弧運動過程,深入了解電弧特性,為接觸器的優(yōu)化設(shè)計提供依據(jù)。
2769 4
大龍貓?? ??? 12月前
【CATIA運動仿真】用CATIA DMU 點-曲線運動副模擬機床切割小螞蟻LOGO模型? 
老鐵們大家好:學(xué)過CATIA 運動仿真的朋友都知道,dmu里有一個點-曲線(point on curve)運動副,典型的高副,但是這個運動副無法進(jìn)行獨立的運動模擬。
3068 3 1
張偉一 ??? 3年前
基于hypermesh與ansys apdl的聯(lián)合仿真——如何建立運動副 
最近重點學(xué)習(xí)了一下這方面的內(nèi)容,談?wù)勎业母邢耄?.使用hypermesh去建立運動副相比于workbench來說操作上的繁瑣程度高了不止一點,所以其實不是很懂學(xué)這個的意義在哪里;2.唯一覺得可能有用的在于后續(xù)去在dyna聯(lián)合仿真中去建立運動副有一定的參考意義,再者就是apdl本身在后處理方面的批量化于實時性的反饋比較好,這是我個人的理解;3.最后說說瑕疵吧,我用的hypermesh
3821 28 9
仿真學(xué)習(xí)cae ??? 1年前
基于AMESim仿真分析軟件的氣動閥門運動特性研究 AMESim氣動附軟件下載 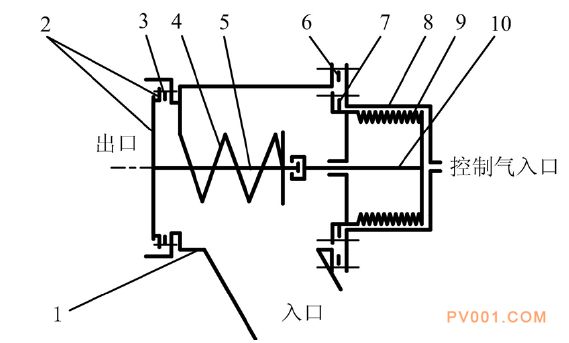
摘要:基于AMESim仿真分析軟件,對氣動閥門內(nèi)部的運動規(guī)律、閥門內(nèi)部零組件相互運動關(guān)系進(jìn)行了研究,并采取了非接觸測量方法,測量了閥門內(nèi)部閥桿運動速度,確定了仿真分析的正確性。結(jié)果表明:氣動閥門在打開瞬間,閥桿會有較大的運動速度,并可能發(fā)生頂桿與閥桿的反向碰撞問題,給頂桿或閥桿帶來損傷。
2570 1
仿真客 ??? 3年前
三自由度機械臂運動學(xué)分析+仿真 
,'MarkerSize',0.5);%畫出落點 hold on; 下載咨詢鏈接 三維模型+word+仿真源代碼文件下載見收費內(nèi)容
3993
余俊煒 ??? 2年前
全新HexaRev運動平臺+HyperDock座艙技術(shù),重塑駕駛員在環(huán)仿真體驗 
?? 通過將運動、振動和聲音整合到一個同步環(huán)境中,這種設(shè)置實現(xiàn)了更真實的駕駛者在環(huán)仿真體驗。#HexaRev 先進(jìn)的六自由度運動系統(tǒng)旨在克服傳統(tǒng)六足平臺的局限,即使在制動和過彎等綜合動作中,也能保持更大的可用運動包絡(luò)。這使得工程師能夠更準(zhǔn)確地感知高動態(tài)條件下的車輛行為。
2514 1 1
VI-grade中國 ??? 1月前
【多體系統(tǒng)仿真算例】齒輪鏈條多體系統(tǒng)運動仿真 
仿真設(shè)計:【仿真平臺】自建高性能計算集群【算例說明】通過數(shù)值仿真,可模擬齒輪鏈條多體系統(tǒng)運動和受力狀況【工程應(yīng)用】齒輪鏈條多體系統(tǒng)運動仿真、多體系統(tǒng)動力學(xué)仿真、機械工程等【創(chuàng)新貢獻(xiàn)】自動化計算流程+計算參數(shù)優(yōu)化+后處理自動生成!!文章內(nèi)容轉(zhuǎn)自微信公眾號“云數(shù)仿真”,更多精彩內(nèi)容請前往微信公眾號進(jìn)行關(guān)注。
2319 1
云數(shù)仿真 ??? 2年前
基于FLUENT的油罐內(nèi)流體運動規(guī)律仿真 
關(guān)鍵詞:FLUENT,油罐,VOF模型,計算流體力學(xué),流體運動罐車緊急制動或者減速過程中會出現(xiàn)液體晃現(xiàn)象,液體晃動會對罐壁產(chǎn)生沖擊載荷,容易影響其使用壽命,并且可能會存在安全問題。對這類運動過程進(jìn)行研究有著重要的工程應(yīng)用意義。利用FLUENT軟件對油罐內(nèi)流體運動規(guī)律進(jìn)行了數(shù)值模擬。通過精細(xì)的網(wǎng)格劃分和仿真設(shè)置,得到了其內(nèi)部流場的速度分布、壓力分布和相分布。
2293
320科技工作室 ??? 11月前
【技術(shù)分享】全新HexaRev運動平臺+HyperDock座艙技術(shù),重塑駕駛員在環(huán)仿真體驗 
?? 通過將運動、振動和聲音整合到一個同步環(huán)境中,這種設(shè)置實現(xiàn)了更真實的駕駛者在環(huán)仿真體驗。#HexaRev 先進(jìn)的六自由度運動系統(tǒng)旨在克服傳統(tǒng)六足平臺的局限,即使在制動和過彎等綜合動作中,也能保持更大的可用運動包絡(luò)。這使得工程師能夠更準(zhǔn)確地感知高動態(tài)條件下的車輛行為。
990 1 1
技術(shù)鄰公告 ??? 1月前
【CAE案例】受地質(zhì)運動影響的大壩非線性仿真 
圖1:工作視圖圖2:監(jiān)測結(jié)構(gòu)位移圖02 解決方案根據(jù)大壩和閘門尺寸,在固體力學(xué)仿真軟件上建立物理模型,研究不同力學(xué)行為對壩體及閘門的位移應(yīng)力影響。圖3是大壩的有限元模型和計算施加的邊界條件。圖3:使用的網(wǎng)格和施加的邊界條件在固體力學(xué)仿真軟件計算中,施加荷載與邊界條件時除了要考慮力載荷(重力、靜水壓力)外,還通過模型邊界的強制位移來模擬地質(zhì)運動現(xiàn)象。
4241 1 1
CAE璐姐 ??? 3年前
基于Adams的六足直立式步行機器人運動仿真分析 
仿真結(jié)果與理論運動學(xué)分析結(jié)果一致,lHJ 擺動角范圍可達(dá)45.5°,可通過改變lHJ延伸桿lJK的長度和曲柄lOF桿長度來調(diào)節(jié)機體步幅大小。4 原型樣機搭建及行走試驗圖9 所示為雙電機驅(qū)動的六足直立式步行機器人。根據(jù)單側(cè)步行腿連桿機構(gòu)運動仿真模型,構(gòu)建另一側(cè)步行腿機構(gòu)模型進(jìn)行運動學(xué)仿真,結(jié)果表明,兩側(cè)步行腿連桿機構(gòu)的運動軌跡和測量曲線變化一致,仿真結(jié)果與理論運動學(xué)分析結(jié)果一致。
4179 7 8
仿真客 ??? 3年前
MCCB觸頭打開電弧運動過程仿真分析 
采用的動網(wǎng)格顯示效果如圖所示 獲取電壓的變化過程云圖,電弧進(jìn)入柵片,動靜觸頭打開,電弧電壓上升,該過程能夠很好的變化電流運動過程,查看其效果觀察柵片的布局合理性,觀察電壓變化過程,為滅弧室設(shè)計提共很好的支撐關(guān)鍵詞:MCCB 電弧仿真 斷路器 ---------------------------------------------------------
2657 3 1
電弧仿真 ??? 4年前
20條/頁 
 74
74 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
