



力學筆記#4:結構動力學和彈性動力學運動平衡方程的異同,順便簡述拉格朗日描述和歐拉描述 
^_^另外,上圖1中的結構動力學運動平衡方程的建立也運用了微元法。當時作為初學者,其實是比較難以想象阻尼力在微元體中到底是怎樣的一種存在的,而目前結構動力學的其他教材,例如克拉夫以及Anil.K.Chopra的那本,都是直接從彈簧振子出發直接建立剛度方程,就少了引出運動平衡方程這一步了。對于偏導符號這個問題,經過學習,大致有了些個人看法,供朋友們批判。
2945
數峰青 ??? 1年前
基于DeltaD打印機的剛柔耦合運動學分析 
摘 要:為避免打印機工作過程中出現運動突變和沖擊,影響打印精度等問題,以Delta打印機為研究對象,完成3D打印機的模型繪制,分析其運動學求解過程,建立打印機的運動學方程,并借助Matlab和Adams軟件完成對運動學方程的驗證.借助Hypermesh對關鍵部件柔性化處理,完成剛柔耦合仿真驗證,對特定工況下傳動誤差?位移?速度和加速度進行分析,驗證了模型設計的合理性.
4395 3
擺渡人張 ??? 2年前
1/4懸架二自由度運動學方程——通過狀態方程的方法在Simulink里面構建模型 

本節課主要是在前兩節課的基礎上,通過狀態方程的方法,在simulink里面構建1/4懸架二自由度運動學方程,然后對懸架的幅頻特性進行分析。以車身加速度對路面位移響應的幅頻特性為例,進行闡述,保姆級教學。。。附帶simulink模型以及matlab求解幅頻特性的方法,歡迎大家一起學習探討并進行指正。
543 2
東邪不邪 ??? 3年前
三自由度機械臂運動學分析+仿真 
機器人逆運動學問題采用矩陣逆乘方法進行求解,如下所示: 1.
3985
余俊煒 ??? 2年前
并聯機械手爪運動學分析 
對采摘機器手爪的運動理論模型驗證是通過理論模型得到與由矩陣計算得到的兩個末端位置進行比較判斷。設定運動模型的起始點和結束點: 代入公式中求得的采摘機器手爪末端位置坐標與采摘機器手爪運動模型的末端位置坐標相等,證明了采摘機器手爪正向運動學求解方程正確,模型姿態如下圖2.10。
2283
余俊煒 ??? 2年前
六軸機械臂(帶抓手)運動學分析+軌跡規劃 
驗證了正運動學方程的正確性。
5207 1
余俊煒 ??? 2年前
五自由度機械臂運動學分析(三轉動+兩移動自由度) 
驗證了正運動學方程的正確性。需要完整代碼看付費內容或者加扣扣2386317960
3035
余俊煒 ??? 3年前
matlab與Adams的機械臂運動學驗證 
圖1 初始位置 2、Matlab編寫運動學方程 通過機械臂幾何信息建立機械臂的DH參數 α θ a d 1 0 0 0 0
2971 1 1
木火柴 ??? 4年前
ADAMS行星齒輪機構運動學及動力學仿真 
動力學仿真 3.1 模型修改 對于行星齒輪機構運動學仿真和動力學仿真之間的區別在于齒輪間相互關系的建立,在運動學仿真中齒輪間靠齒輪副連接,相互之間的運動與理論值高度吻合。動力學仿真時齒輪間采用接觸的方式相互連接,在動力學仿真中會因為齒輪間接觸剛度和間隙,而使仿真結果和理論計算值產生一定的出入,但是更加真實。
4597 8 1
劉曉東 ??? 2年前
[機器人學習]-樹莓派6R機械臂運動學分析 ![[機器人學習]-樹莓派6R機械臂運動學分析](https://img.jishulink.com/msimage/202212/724f9dd4ed1679d29341729d06ff291c.png?image_process=resize,fw_294,fh_172,)
驗證了正運動學方程的正確性。模型與matlab程序如下:如需要定制服務可以咨詢扣扣2386317960
2558 1
余俊煒 ??? 3年前
基于ADAMS的助老起升裝置的運動學仿真分析 
首先基于機械原理完成核心機構和裝置的設計,然后利用 CRE O完成三維模型的建立,再在多體動力學 ADAMS 軟件中建立該虛擬樣機的運動學模型,通過測量指定點的位移、速度、加速度等運動學參數的變化曲線完成仿真 分析,最后在實驗室制造出物理樣機進行實際驗證,該研究結果為后續批量生產提供理論研究依據。
2597 5
擺渡人張 ??? 2年前
一級方程式賽車的空氣動力學測試規定有多嚴格? 
2009 年,作為限制測試時間的一步,一級方程式車隊協會 (FOTA)簽署了資源限制協議,今天,一級方程式車隊必須遵守這些測試限制。不遵守這些規定將招致處罰。 車輛設計的 3D 表示(物理或數字)稱為受限空氣動力學測試幾何 (RATG) ,并且團隊每年分配 6 個空氣動力學測試周期 (ATP) 。第一個測試期在第 9 周結束時。第二、第三和第五個測試期各持續八周。
2935
Fidelity CFD ??? 3年前
基于機械系統動力學自動分析的多噴頭3D打印機運動學研究 
摘 要:針對目前3D打印機打印回轉體類型零件速度慢、插補復雜、效率低等缺陷,設計一種3D打印機,由底座、行星齒輪組、Z軸運動機構、橫向絲杠機構和料架等組成。通過ADAMS仿真軟件進行運動學虛擬仿真分析。3D打印機可通過增加打印噴頭數量來提高打印速度。通過對多噴頭的協作打印方案進行運動仿真模擬計算,得到運動學特性。
4499 4
擺渡人張 ??? 2年前
六軸碼垛機器人admas正逆運動學仿真 
完成機器人的運動學逆解后需要對求出的各個關節的角度再進行仿真驗證。
2373
余俊煒 ??? 3年前
Adams&Workbench&Matlab四連桿機構運動學分析 
已知四連桿機構的相關參數,通過數學公式便可推導出其運動學模型,并將其運動學模型利用Matlab語言進行編寫,其代碼如圖6所示。
2808
擺渡人張 ??? 2年前
ANSYS workbench 四連桿運動學分析 
案例介紹了ANSYS workbench 四連桿機構運動學分析。本案例完整得提供了分析相關所有分析文件。 ?
2310
天空紀年xh ??? 1年前
多學科統一的多體動力學建模方法 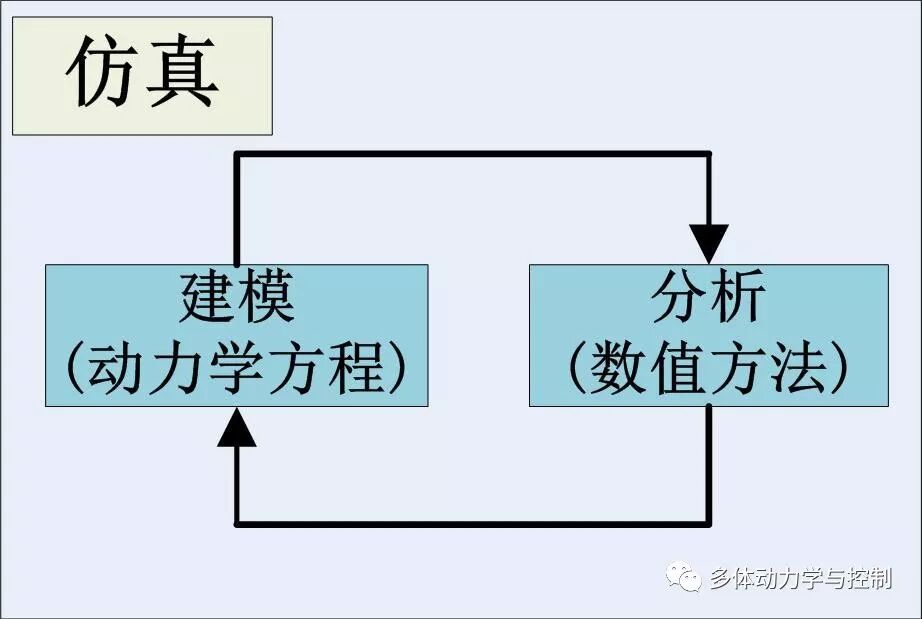
系統變量的統一表達 1.運動學變量 運動學變量包括廣義位移和廣義速度,它們的數學關系是: 廣義位移包括:機械平移運動的位移、機械轉動的角度和電學系統電荷量。廣義速度為對應的廣義位移的導數,包括:機械平移運動的速度,機械轉動的角速度,電學系統的電流。2.運動源變量 運動源變量包括廣義作用源和廣義動量源。
3297 5 3
CAE仿真學習菌 ??? 2年前
matlab調姿機構動力學?
圖 1 調姿機構三維模型示意圖4.2 調姿機構動力學分析方法 (1)基于拉格朗日方程的調姿機構動力學理論 一般說來,動力學方程可用來確定機構的運動,也就是說,只要知道所受的力和力矩就能確定機構如何運動。
2434 5
用戶_50729 ??? 1年前
請問,采用ABAQUS做一個物體不斷的旋轉運動,采用隱式動力學和顯示動力學差異巨大,是什么原因?
3.請問有沒有大佬告訴我,如何在顯示動力學里設置,可以使得計算結果與用隱式動力學相同?即在旋轉50秒時間里,物體的應力分布保持恒定,且與隱式動力學結果接近?4.如果幫我解決了這個問題和疑惑,可有償20RMB補償,謝謝各位大佬。
4304 14 12
merami ??? 2年前
Matlab機械連桿機構運動學仿真:包含三桿滑塊機構\四桿\六桿 
詳細介紹了三桿滑塊機構和四桿機構運動方程的推導及matlab對上述機械連桿機構運動仿真,并實現機械連桿機構運動動畫的繪制,注:六桿機構無公式推導文本,只有代碼。如需模型推導說明文本及matlab源碼,請附件下載。
16
SimPC ??? 3年前
20條/頁 
 101
101 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
