



求助一下怎么在一個孔的位置約束兩個轉動副和如何將中間的正弦桿約束到只在槽內平移和旋轉,并且正弦桿旋轉的時候帶動所接觸的長方塊一起運動?
1784
用戶_105580 ??? 11月前
ansys apdl 實體單元怎么實現繞軸轉動,在極坐標下施加徑向約束和加載周向位移行不通呀?
呀呀
2046 1
用戶_37319 ??? 2年前
多學科統一的多體動力學建模方法 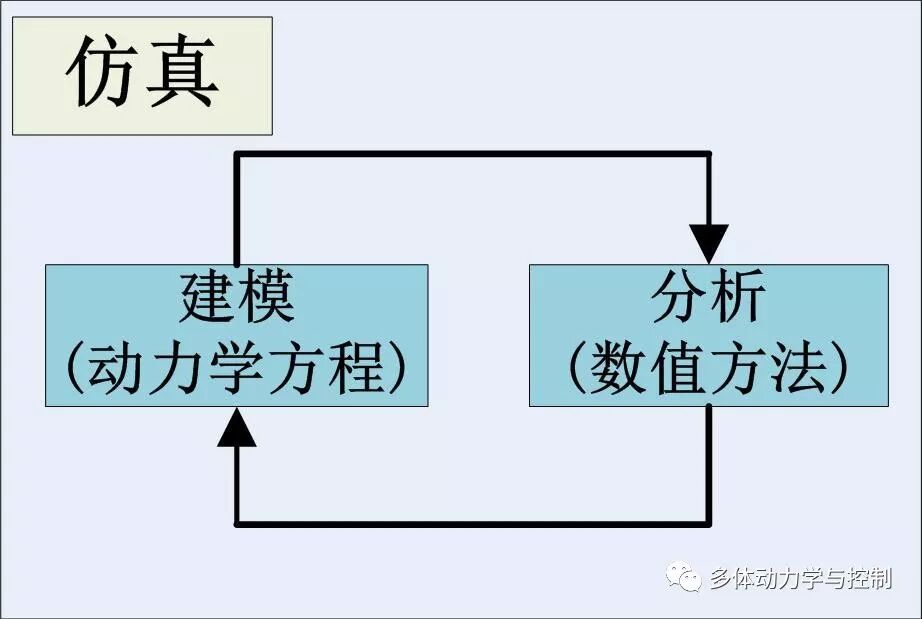
在機械轉動中,轉動慣量為理想感元。在電學系統中,電感為理想感元。2.理想容元 在機械平移運動中,彈簧為理想容元。在機械轉動中,扭轉彈簧為理想容元。在電學系統中,電容為理想容元。3.理想耗元 在機械平移機構中的阻尼器為理性耗元,例如輪胎的阻尼。機械轉動中的轉動阻尼為理性耗元。電學系統中的電阻為理性的耗元。
3299 5 3
CAE仿真學習菌 ??? 2年前
喵星人嘔心瀝血總結ABAQUS易出錯的邊界條件 
</p><p>另外,由于對整個底面設置了U2方向的位移自由度,因此該面不會發生轉動。這是因為轉動時該面需繞軸轉動,因此必定有面上的點發生U2方向位移,如果約束U2方向位移,相當于約束面的轉動自由度。
3082 27 14
會CAE的喵星人 ??? 9月前
喵星人嘔心瀝血總結ABAQUS易出錯的邊界條件 

1.支架設置的常見問題——鉸接邊界條件設置了豎向約束認為支座是固定鉸接,因此釋放了轉動自由度UR1,事實上,對于實體單元而言并無轉動自由度,因此UR1,UR2,UR3的約束設置與否均無意義。另外,由于對整個底面設置了U2方向的位移自由度,因此該面不會發生轉動。這是因為轉動時該面需繞軸轉動,因此必定有面上的點發生U2方向位移,如果約束U2方向位移,相當于約束面的轉動自由度。
1152
會CAE的喵星人 ??? 6月前
案例19 挖掘機臂裝配體的瞬態動力學分析 
活塞1和力臂1,活塞2和力臂2之間的轉動副 自由自由度——1個沿轉動軸的相對轉動 約束自由度——3個相對位移,2個相對轉動 很顯然由于平動連接副中的轉動約束,活塞1相對壓力缸1沒有轉動,因此活塞1和力臂1,活塞2和力臂2之間的轉動副中的轉動約束是不需要的,而這些部件之間的相對位移必須保留,所以轉動副可被球面副所代替,球面副提供相同的相對位移約束
3342 8 1
龍飛宇 ??? 3年前
有限元理論基礎及Abaqus內部實現方式研究系列47:約束關系(3)-船舶規范約束導致的Max Ratio問題 
3.2 反饋的工程問題按這個綁定,理論上講該橫剖面y和z方向不會平動,且不會繞x軸(船長方向)轉動,而可以在x方向平動,且可以繞y和z軸轉動,我們對規范不了解,但和我們主觀上其它艙段對中間三個艙段的作用還是比較吻合的。那么正常來說,有限元計算出的結果也應該是這樣。但事實上用戶對不同的三艙段模型,采用iSolver或者Nastran計算,部分結果正確,部分模型結果不對。
3742 3 7
SnowWave02 ??? 1年前
CAE黑話:自由度(DOF)/多點約束(MPC)/剛體位移 
3D結構中,一個節點通常有6個自由度:3個平動 (UX, UY, UZ) 和 3個轉動 (ROTX, ROTY, ROTZ)。約束 (Boundary Condition) 的本質就是限制某些節點的DOF。DOF過少導致欠約束,計算報“奇異”;DOF過多導致過約束,結果失真。
1451
技術鄰-大奎 ??? 2月前
abaqus桁架單元在一根桿上設置不同的材料屬性?
求助各位大神,我想在abaqus中利用桁架單元T3D2建立網架模型,同時把一根桿的兩端設置成與中間不一樣的材料屬性,請問要怎么設置,如果直接打斷的話一根桿就變成三根桿了,如果是打算之后把節點約束三個方向的轉動的話,桁架單元不是只傳遞軸力不傳遞彎矩嗎,能通過約束轉動實現嗎?
2287 5 2
天祿石渠 ??? 3年前
仿真工程師為什么要在bonded(粘結)連接中使用基于MPC(多點約束)的接觸? 
? 由于約束方程定義了剛性連接,因此不需要進行接觸剛度計算。? 同時考慮了平動自由度和轉動自由度。? 由于約束方程基于MPC,因此在大變形分析中它們將被更新。? MPC 選項也適用于不分離線性接觸。因此,如果你需要一個真正的粘結或不分離連接,同時減少自由度數量并在大變形中更新,不妨試試MPC粘結和MPC不分離公式。
4113
格澤 ??? 1年前
基于ANSYS軟件的1+6鋼絲繩網格劃分策略及仿真 
加載端面具有x、y、z 3個方向的移動、轉動自由度,因此參考節點可以選用質量21單元。本文對參考節點施加位移載荷0.2 mm, 控制參考節點z向的轉動自由度可以實現鋼絲繩加載端面約束扭轉和自由扭轉2種不同的邊界約束。本方法通過對參考節點定義邊界條件和施加載荷可以實現對加載端面的等效操作。
5820 3 5
Infiniteelements ??? 2年前
Abaqus圓盤轉動分析 
(顯示體約束,連接單元的使用)
2684 1 12
寒江雪_123 ??? 8年前
基于hypermesh與ansys apdl的聯合仿真——如何建立運動副 
移動副的區別在于建立兩個接觸組,接觸面與mpc的i節點連接,目標面與mpc的j節點連接,如下樹狀圖如下對于mpc單元這里的設定改為了移動而不是轉動后續操作都是一樣的就不介紹了,也就是建立坐標系,坐標系編號,建立約束。
3820 28 9
仿真學習cae ??? 1年前
lsdyna計算結果中為什么我的鉸支座無法轉動?
中間有一個鉸支座,上下分別是兩塊剛性板,限制的下板的位移,上板無任何約束,但是邊側這個柱無任何轉動,有人知道嗎?
2230 4
有點is ??? 1年前
Ansys中級認證窗口課程:LS-DYNA中殼體與實體單元連接技術應用 
如果不需要傳遞轉動可以使用合并節點法和約束法,合并節點法要求節點重合,計算效率最高,約束法不要求節點重合。接觸法可以傳遞轉動,接觸法使用最為靈活,消耗的計算資源較多。殼體單元的每個節點只有3個沿著x、y和z方向的平動自由度UX、UY、UZ;在實體單元中,每個節點具有六個自由度:沿x、y 和z方向的平動自由度UZ、UY、UZ以及繞X、Y和Z軸的轉動自由度TOTX、TOTY、ROTZ。
4017 7 3
李安民 ??? 3年前
奇妙的abaqus hinge 連接器單元(二) 
Join 連接器約束了兩點之間的相對位置關系,revolute連接器約束了兩點之間的旋轉關系,兩者結合就是hinge——只存在一個方向的相對轉動,其他五個相對自由度均被約束的運動關系。在abaqus中,定義基礎連接器join和revolute的結合(下圖左),與直接定義hinge(下圖右),效果是一毛一樣的。
5114 10 5
MaCC ??? 4年前
Abaqus應用之常見問題處理 (三) 
12) 摩擦約束的局限性:不要依賴摩擦力來約束剛體的平動和轉動,而應根據實際工程情況定義盡可能多的邊界條件,因為在分析初期接觸關系尚未建立,摩擦力無法起到約束作用。13)“零主元”和“過約束”警告:這些警告可能由約束不足或過多引起。
4374 8
Abaqus_JUN ??? 1年前
有限元分析需要注意的三大原則 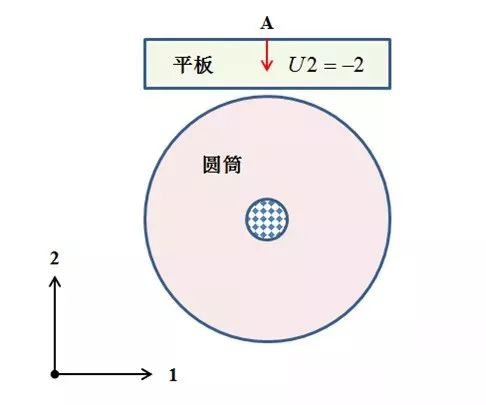
有限元接觸分析時的另一個重要原則是,盡量不要依靠摩擦來約束剛體的平動和轉動,而應該根據工程實際定義盡可能多的邊界條件。因為在分析剛開始時,各個接觸關系還沒有建立起來,摩擦力無法起到約束作用。有限元分析除了網格劃分之外,載荷、約束、邊界條件的設定技巧也是重點,需要基于產品模型,工況條件等具體情況具體分析,多做項目積累經驗,用盡可能少的計算資源得到盡可能精準的仿真分析結果。
2635 1
仿真客 ??? 3年前
挖掘機多體動力學仿真 
圖3 幾何模型導入 圖4 部件材料賦予 約束創建 INTESIM-FMBD多體動力學軟件支持豐富的約束類型及運動副,包括常用的固定副、轉動副、滑移副、圓柱副、球副、萬向節
3709 3
CAE仿真學習菌 ??? 2年前
基于ADAMS的車輛減速器制動性能分析 
其中,傳動組件有確定的約束關系,宜采用運動副進行約束;制動組件主要為車輛車輪和制動軌等部件的相互摩擦作用,需通過接觸建立約束。搭建好的減速器三維模型見圖2,藍色部分為基礎組件,綠色部分為制動組件,灰色部分為傳動組件。
3337 6 1
擺渡人張 ??? 2年前
20條/頁 
 10
10 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
