



RecurDyn 應(yīng)用:基于多體動力學(xué)的齒輪傳動系統(tǒng)動力學(xué)仿真 
本文介紹基于多體動力學(xué)的齒輪傳動系統(tǒng)動力學(xué)仿真,使用多體動力學(xué)對齒輪傳動系統(tǒng)進行動態(tài)仿真的一種新方法,這一方法能使工程師在各種情況或條件下開發(fā)齒輪傳動系統(tǒng)。首先,介紹RecurDyn/DriveTrain 解決方案;其次,分享相關(guān)應(yīng)用案例;然后,將繼續(xù)驗證這種齒輪接觸計算方法;最后進行總結(jié)。
3871 2
CAE仿真學(xué)習(xí)菌 ??? 2年前
RecurDyn熱力學(xué)仿真新突破:摩擦生熱與油冷散熱的集成解決方案 
</p><p>最后,RecurDyn2025結(jié)合Particleworks,提供了業(yè)界領(lǐng)先的熱學(xué)仿真解決方案:</p><p>1.<strong>精準內(nèi)熱源:</strong>通過<strong>摩擦熱耦合</strong>功能,在系統(tǒng)動力學(xué)仿真中直接、準確地計算接觸面摩擦生熱。</p><p>2.
3115 2 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 10月前
RecurDyn是否可以批量建立接觸約束,如圓環(huán)鏈鏈輪傳動系統(tǒng)?
RecurDyn是否可以批量建立接觸約束,如圓環(huán)鏈鏈輪傳動系統(tǒng)?
2630 1 2
邱_2257 ??? 3年前
技術(shù)小貼士:RecurDyn接觸元素(Contact)初級教程-Solid/Geo Contact 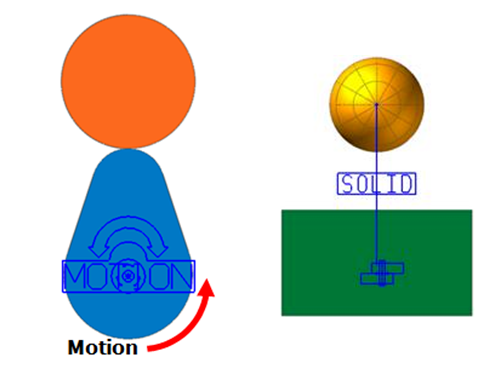
繼上次“RecurDyn接觸元素(Contact)初級教程第一彈”之后,這次我們來看看RecurDyn的接觸元素中最常用的是Solid Contact和Geo Contact。注意:Contact的運用受到模型中各種因素(形狀,參數(shù)等)的影響。因此,下面介紹的內(nèi)容是基本的向?qū)В趯嶋H模型中,根據(jù)不同的情況,會發(fā)生與下面介紹不同的情況。
3391 1
CAE仿真學(xué)習(xí)菌 ??? 2年前
《基于 RecurDyn 的四履帶足機器人運動學(xué)仿真》現(xiàn)已開放領(lǐng)取 
摘要: 應(yīng)用多體動力學(xué)仿真分析軟件 RecurDyn 對四履帶足機器人進行全三維建模及越障過程仿真,并分析了履帶機器人行走過 程 中 的 力 學(xué) 模 型,仿真 結(jié) 果 動 態(tài),準確的反映了四履帶足機器人行走機構(gòu)的越障過程,驗證了四履帶足機器人行走機構(gòu)較之雙履帶結(jié)構(gòu)形式出色的越障能力,體現(xiàn) 了 RecurDyn 軟件在履帶機器人的動力學(xué)仿真分析方面的有效性和優(yōu)越性 。1. 引言2.
2553
上海安世亞太 ??? 2年前
技術(shù)小貼士:RecurDyn/DriveTrain 提供的3種接觸到底怎么選? 
以上就是今天給大家分享的關(guān)于RecurDyn/DriveTrain中三種接觸的用法,感興趣的朋友可以點個關(guān)注,我們下期再見! 作者: RecurDyn中國 毛可春
2738 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
Recurdyn接觸特征參數(shù)含義 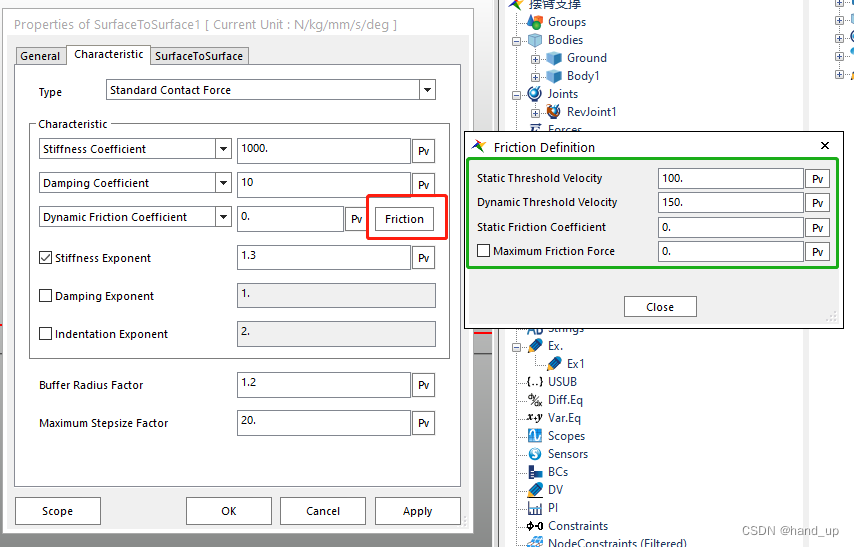
即使是盒形幾何,如果這個值被定義(選中),盒形幾何也可以與大量三角形或四邊形補丁一起使用,如下圖所示。 5.Cubic Cell Size立方單元格大小: 顯示在每個方向上劃分接觸邊界框的立方單元格數(shù)量。該值是自動計算的,但可以由用戶修改。
4447 2
CAE仿真學(xué)習(xí)菌 ??? 2年前
跟我一起來認識RecurDyn 附RecurDyn柔性體技術(shù)介紹下載 
RecurDyn不僅可以探究由若干個構(gòu)件(柔性體和/或剛性體)相互連接、支承所組成的多體系統(tǒng)的運動學(xué)/動力學(xué)規(guī)律,還可以進行多學(xué)科集成仿真,實現(xiàn)機電液一體化。它采用相對坐標系運動方程理論和完全遞歸算法,具備令人震撼的求解速度與穩(wěn)定性,非常適合用于求解大規(guī)模及復(fù)雜接觸的多體系統(tǒng)動力學(xué)問題。RecurDyn擁有強大的接觸建模及求解功能,在解決工程中機構(gòu)接觸碰撞問題方面有其獨到之處。
3505 1
huanggu4797 ??? 3年前
基于RecurDyn的節(jié)能與新能源汽車傳動系統(tǒng)動力學(xué)仿真技術(shù) 

課程內(nèi)容:1、兩擋純電動車變速箱動力學(xué)仿真及NVH特性分析2、汽車發(fā)動機正時帶傳動系統(tǒng)動力學(xué)建模與仿真分析3、基于RecurDyn和AMESim聯(lián)合仿真的鏈式CVT動力學(xué)性能分析4、基于RecurDyn與Particleworks聯(lián)合仿真的鏈傳動系統(tǒng)潤滑分析5、鋼帶CVT數(shù)字化設(shè)計與動力學(xué)仿真工具二次開發(fā)及案例演示
2674 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
RecurDyn成功案例:多體動力學(xué)仿真研究行星絞線機的運行場景 
在設(shè)計過程中采用RecurDyn軟件對絞線機所有可能面臨的操作場景進行仿真分析,依據(jù)仿真結(jié)果確定了最大負載、零件尺寸以及大型電機的規(guī)格型號。
2284
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecurDyn成功案例:多體動力學(xué)仿真研究行星絞線機的運行場景 
在設(shè)計過程中采用RecurDyn軟件對絞線機所有可能面臨的操作場景進行仿真分析,依據(jù)仿真結(jié)果確定了最大負載、零件尺寸以及大型電機的規(guī)格型號。
2318 2 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
RecurDyn 新手入門指導(dǎo)
Tutorial(教程)包含RecurDyn多個模塊的內(nèi)容: Professional為多體動力學(xué)基本建模模塊,包含了建立體、接觸、約束等功能; ProcessNet為二次開發(fā)模塊,基于.NET框架,支持c#和VB兩種編程語言; AutoDesign為優(yōu)化設(shè)計模塊; Colink為RecurDyn內(nèi)置的控制模塊;
4249 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
關(guān)鍵建模技術(shù)全解析(基于RecurDyn) 
控制棒落棒問題是一個典型的多物理場耦合動力學(xué)問題。通過RecurDyn結(jié)合二次開發(fā)能力,可以實現(xiàn)結(jié)構(gòu)、接觸與流體作用的統(tǒng)一建模,為核電安全分析提供高精度、可驗證的仿真手段。 關(guān)注我們,下期將介紹RecurDyn在更多領(lǐng)域的仿真應(yīng)用,一起探索工業(yè)仿真的更多可能。本文由RecurDyn原廠(杭州擬創(chuàng)科技有限公司)發(fā)布
1022
杭州擬創(chuàng)(RecurDyn原廠) ??? 1月前
【RecurDyn在工程/農(nóng)業(yè)機械領(lǐng)域的應(yīng)用】直播補充 
答:需要在EDEM中設(shè)置wall的參數(shù),在Recurdyn中也要給皮帶設(shè)置真實的物理屬性。 履帶仿真問題 問:怎么把建立的剛性履帶合并到一起,柔性化以后添加接觸和約束,讓它能仿真成功?
3686 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 4年前
RecurDyn應(yīng)用—自動注射器釋放機構(gòu)動態(tài)仿真 
二、關(guān)鍵技術(shù):RecurDyn 柔性接觸仿真,精準捕捉部件互動 在該注射器釋放機構(gòu)建模中,RecurDyn的FFlex模塊成為核心支撐——它能實現(xiàn)柔性體動力學(xué)仿真,其接觸算法可精準捕捉系統(tǒng)中可變形部件的相互作用:?通過FFlex模型,可細致分析機構(gòu)觸發(fā)過程中的應(yīng)力分布與變形情況,確保釋放機構(gòu)功能完全符合設(shè)計要求;?即使在高速動態(tài)工況下,RecurDyn的接觸檢測與處理能力,也能高保真還原剛性部件與柔性部件的相互作用
2422
杭州擬創(chuàng)(RecurDyn原廠) ??? 8月前
齒輪箱全方位仿真:RecurDyn 與 Particleworks 的聯(lián)合應(yīng)用 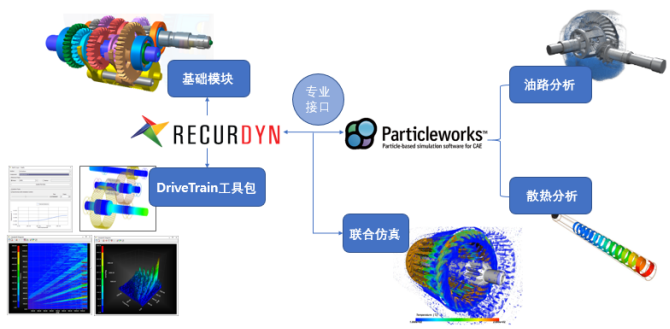
本文將介紹使用RecurDyn對齒輪箱進行仿真時的整體技術(shù)路線:首先設(shè)計好齒輪箱的整體結(jié)構(gòu),在RecurDyn中搭建多體動力學(xué)模型,定義各部分的運動行為及不同構(gòu)建之間的接觸關(guān)系。使用RecurDyn的Drivetrain工具包對模型進行修改,將齒輪箱中的齒輪、軸、軸承等部件使用Drivetrain工具包中的模塊進行替換,輸出軸變形、齒輪傳動誤差分析、NVH分析等仿真結(jié)果。
3513 3
杭州擬創(chuàng)(RecurDyn原廠) ??? 1年前
RecurDyn成功案例:鼓式制動系統(tǒng)的噪聲和振動分析 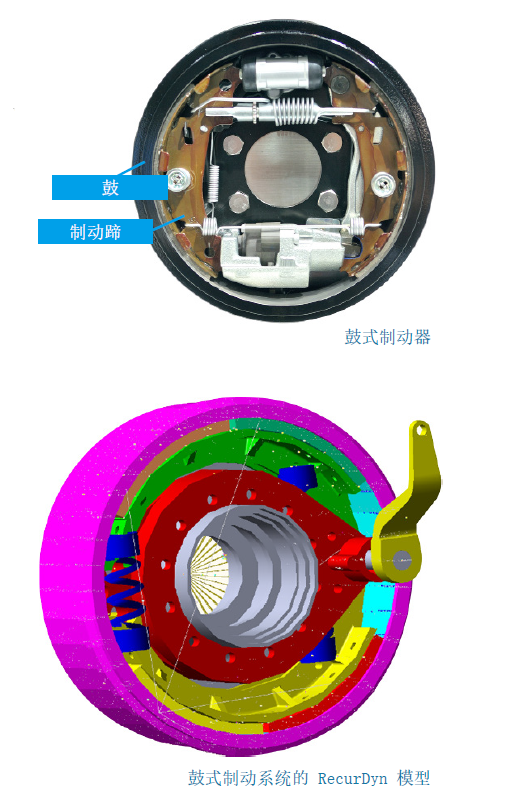
為優(yōu)化制動設(shè)計,采用多柔體動力學(xué)軟件RecurDyn,對鼓式制動系統(tǒng)運行過程中的摩擦和振動進行復(fù)現(xiàn),并評估其振動和制動性能。創(chuàng)建制動系統(tǒng)數(shù)字孿生模型,并評估兩種不同制動系統(tǒng)的設(shè)計。
2210 1 5
仿真客 ??? 3年前
基于RecurDyn的多工況下的尼龍蝸輪疲勞性能研究 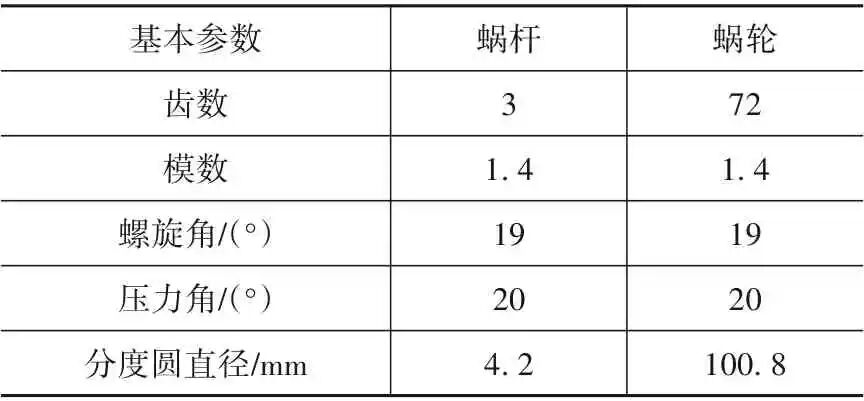
圖2 蝸輪蝸桿動力學(xué)模型Fig.2 Dynamics model of worm and worm gear蝸輪蝸桿的動態(tài)接觸模型是進行動力學(xué)分析的關(guān)鍵,RecurDyn 采用Hertz 接觸理論表達兩物體之間的接觸,在非線性瞬態(tài)接觸中,假定兩物體接觸時產(chǎn)生了穿透,依據(jù)穿透量、接觸剛度系數(shù)及接觸阻尼系數(shù)計算接觸力。
3019 1 1
仿真客 ??? 3年前
recurdyn動力學(xué)分析 
recurdyn動力學(xué)分析
Recurdyn 13060190875 ??? 4年前
recurdyn履帶車輛動力學(xué)分析 
recurdyn履帶車輛動力學(xué)分析
1730
Recurdyn 13060190875 ??? 4年前
20條/頁 
 18
18 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
