



三自由度機械臂運動學(xué)分析+仿真 
robot.teach; %畫出模型并進(jìn)行調(diào)控 robot.display(); %顯示建立的機器人的DH參數(shù) 運行上述程序,即可得到機器人模型如圖 3-3 圖 33機器臂模型 運動空間分析 依據(jù)機器人三個自由度的運動范圍,采用三自由度機器人模型進(jìn)行計算
3992
余俊煒 ??? 2年前
三自由度系統(tǒng)固有頻率及振型的求解 
求解三自由度系統(tǒng)固有頻率; 求解三自由度系統(tǒng)固有頻率對應(yīng)的振型; 理解歸一化是如何實現(xiàn)的。
1961
刺殺泊松比 ??? 4年前
五自由度機械臂運動學(xué)分析(三轉(zhuǎn)動+兩移動自由度) 
1正運動學(xué)分析采用標(biāo)準(zhǔn)的D-h法進(jìn)行機械腿模型分析:D-h表如下(2)通過(1)求解出機器人各位姿變換矩陣后,求解機器人手臂變換矩陣。通過matlab 計算,寫出機器人末端位置。正運動學(xué)分析根據(jù)D-H表規(guī)定得到如下變換矩陣為:由此可得機器人相鄰兩關(guān)節(jié)位姿分別為:所以,坐標(biāo)系{4}相對于基坐標(biāo)系的變換矩陣為
3035
余俊煒 ??? 3年前
【JY】基于Matlab的(單)多自由度動力學(xué)代碼分享 
寫在前文多自由度分析是現(xiàn)代工程和科學(xué)研究中不可或缺的一部分。它涉及到對復(fù)雜系統(tǒng)的動力學(xué)行為進(jìn)行精確描述和預(yù)測。分享下多自由度的源代碼,僅供學(xué)習(xí)。
4296 12 2
建源之光 - 減隔震 ??? 2年前
淺析有限元分析中自由度的概念 
這是因為在三維空間中,質(zhì)點可以沿著三個彼此垂直的坐標(biāo)軸(通常是x、y和z軸)移動。空間中的剛體有六個自由度。這是因為一個剛體在三維空間中可以進(jìn)行平移運動(沿x、y、z軸方向),同時還可以繞這三個軸進(jìn)行轉(zhuǎn)動。假設(shè)A點位于某條線上,則A點有幾個自由度?假設(shè)A點位于某條線上,除了可以在該線上進(jìn)行平移運動外,還可以繞該線旋轉(zhuǎn)。
2694
CAE知識手札 ??? 2年前
Zemax案例 | 基于Zemax相機多自由度主動對準(zhǔn)技術(shù)研究 
現(xiàn)有技術(shù)可分為三類: 像差分析法:基于節(jié)點像差理論,建立誤差與波前像差的解析關(guān)系,需高精度波前測量,設(shè)備成本高昂[2]; 數(shù)據(jù)驅(qū)動法:通過深度學(xué)習(xí)、靈敏度矩陣建立數(shù)值映射[3],依賴大量樣本與復(fù)雜訓(xùn)練,工程落地門檻高; 搜索優(yōu)化法:構(gòu)建評價函數(shù)引導(dǎo)優(yōu)化,無需復(fù)雜建模,但遍歷搜索耗時極長,多自由度場景下效率暴跌。
978
摩爾芯創(chuàng) ??? 15天前
Adams模擬單自由度系統(tǒng)強迫振動 
如果沒有阻尼,系統(tǒng)將由將變?yōu)橄率剑? 公式由三部分組成:1是系統(tǒng)由初始條件產(chǎn)生的振動,2是激勵產(chǎn)生的強迫振動,3是伴隨強迫振動產(chǎn)生的自由振動。
2756 1
擺渡人張 ??? 2年前
CAE黑話:自由度(DOF)/多點約束(MPC)/剛體位移 
?? CAE黑話科普:DOF、MPC與剛體位移 (工程師實戰(zhàn)篇) CAE新人常聽到的這三個詞,是理解有限元分析(FEA)約束的核心。 1?? 自由度 ( Degree of Freedom , DOF ) 節(jié)點能運動的獨立方向。
1451
技術(shù)鄰-大奎 ??? 2月前
第七自由度及二階張量介紹 

θ′≠β′的物理來源第八自由度:截面畸變(箱形截面輪廓變形)與橫向雙力矩橫隔板/墜板加強體系:離散力法求解與連續(xù)化等效數(shù)學(xué)同構(gòu):隔板連續(xù)化方程與彈性地基梁方程的對比及邊界層衰減效應(yīng)第三章 空間穩(wěn)定、幾何剛度與有限元落地邏輯偏心荷載下的壓彎扭耦合與幾何剛度矩陣構(gòu)建變系數(shù)特征值問題與 Galerkin 近似解法有限元軟件底層架構(gòu):7自由度單元的形函數(shù)基底與剪切自鎖假設(shè)
4
飯42 ??? 19天前
Zemax案例 | 基于自由曲面的高分辨率成像光譜儀設(shè)計 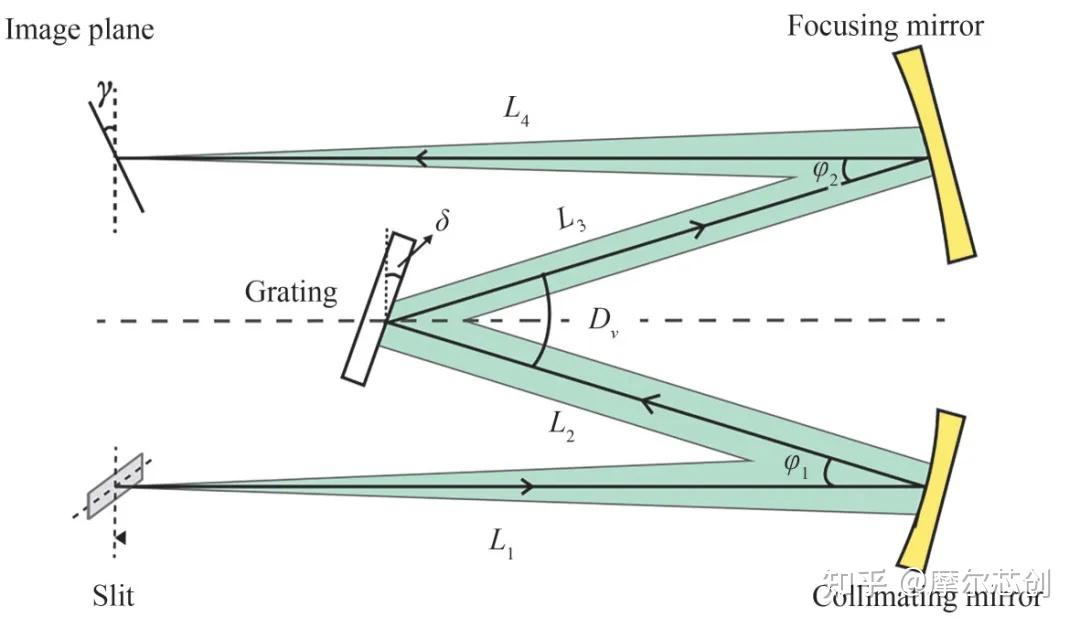
仿真結(jié)果顯示(如圖4所示),優(yōu)化后系統(tǒng)在475nm、500nm、525nm三個關(guān)鍵波長下,MTF曲線均接近衍射極限,且在31.25lp/mm處的MTF值均大于0.7——這意味著系統(tǒng)即使在高空間頻率下,仍能保持優(yōu)異的圖像對比度,可精準(zhǔn)還原目標(biāo)的空間細(xì)節(jié)。
2291
摩爾芯創(chuàng) ??? 4月前
有限元理論基礎(chǔ)及Abaqus內(nèi)部實現(xiàn)方式研究系列47:約束關(guān)系(3)-船舶規(guī)范約束導(dǎo)致的Max Ratio問題 
剛度陣每一行都對應(yīng)某個自由度,這一行的剛度*未知量=這個自由度上的載荷(由文章第45篇可知,其實也是一個約束方程),如果這個行的剛度都是0,只要這個自由度對應(yīng)的載荷項也是0,那么在高斯分解成LU矩陣后反向求解自由度對應(yīng)的位移時,可以跳過這個方程,同時將這個自由度對應(yīng)的位移設(shè)為為0就行。
3742 3 7
SnowWave02 ??? 1年前
Ansys Workbench模態(tài)分析 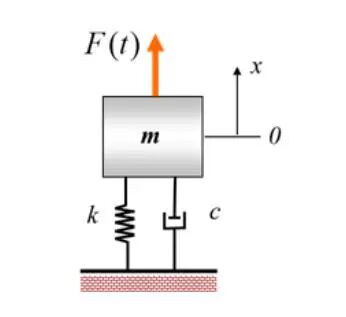
空間上的質(zhì)點有三個自由度,分別為三個方向的平動自由度;空間上的剛體有六個自由度,分別為三個平動、三個轉(zhuǎn)動自由度。一個連續(xù)體實際上有無窮多個自由度,有限元分析時將連續(xù)的無窮多個自由度問題離散成為離散的有限多個自由度的問題,此時,結(jié)構(gòu)的自由度也就有限了。因此,可以這樣理解,一個自由度對應(yīng)一階,連續(xù)體有無窮多階。像彈簧--質(zhì)量模型為單自由度系統(tǒng),故對應(yīng)的頻率只有一階。兩自由度系統(tǒng)有兩階。
7150 6
乘風(fēng)破浪_ ??? 2年前
Abaqus應(yīng)用之常見問題處理 (三) 
10) 邊界條件與自由度:所有不會發(fā)生位移的自由度都應(yīng)在邊界條件中設(shè)為零。在每個分析步中,若某自由度未施加力載荷,需通過邊界條件約束該自由度;若施加了力載荷,則需去掉該自由度上的邊界條件。11) 先位移后力載荷:施加力載荷前,應(yīng)先利用位移邊界條件建立平穩(wěn)的接觸關(guān)系,然后在下一個分析步中施加力載荷。
4376 8
Abaqus_JUN ??? 1年前
【HyperWorks優(yōu)化實例向?qū)А恐?em>自由形狀優(yōu)化 
例1 內(nèi)外邊界節(jié)點優(yōu)化 (classic 方法)優(yōu)化三要素變量節(jié)點位置如下圖所示,限制四個角點只能沿著y軸方向移動。
2485 4
清風(fēng)徐來asd ??? 2年前
尺寸鏈計算中組合位置度如何處理? 
,兩孔中心線分別能在Ф0.2的范圍內(nèi)變化;因為C基準(zhǔn)帶有 “><”符號,C基準(zhǔn)只約束方向自由度不約束位置自由度,所以兩黃色圓的圓心的連線必須與C基準(zhǔn)保持平行,兩黃色圓可以圓心保持理論正確尺寸作為一個整體在藍(lán)色圓范圍內(nèi)平移但不能旋轉(zhuǎn),公差帶相對于ABC基準(zhǔn)的位置是浮動的。
3835 1
笑酒仙 ??? 3年前
【HyperWorks優(yōu)化實例向?qū)А恐?em>自由形狀優(yōu)化
Altair OptiStruct? 自由形狀優(yōu)化算法:classic 和 vertex morphingAltair OptiStruct? 自由形狀優(yōu)化算法分 classic 和 vertex morphing 兩類,vertex morphing 方法自由度更大,但是計算量也會隨之大幅度增加,而且 vertex morphing 方法目前還是 beta 版本,使用時需謹(jǐn)慎。
2562 5
清風(fēng)徐來asd ??? 2年前
Ansys 院士私享講堂|“一天跑完上億自由度”——大規(guī)模裝配-接觸仿真的最新突破 
10 月 24 日 · 線下零距離 · 與 Ansys Fellow 朱永誼博士面對面當(dāng)產(chǎn)品復(fù)雜度從“零件”躍遷到“系統(tǒng)”,有限元模型動輒上億自由度,接觸對數(shù)量呈指數(shù)級增長。如何讓“超大規(guī)模裝配模型在 8 小時內(nèi)完成建模-求解-校核”成為日常,而非傳奇?
2286 1 1
Ansys中國 ??? 7月前
SYNOPSYS 光學(xué)設(shè)計軟件課程三十九:設(shè)計自由曲面反射系統(tǒng) 
課程三十九:設(shè)計自由曲面反射系統(tǒng) SYNOPSYS 提供可以簡化設(shè)計自由曲面的過程。閱讀幫助文件中的 FFBUILD。我們將展示如何設(shè)計一個具有自由曲面的反射系統(tǒng)。 第一步是初略的列出幾何圖形。
2206
墨光科技 ??? 2年前
UEL單元開發(fā)教程 | 三節(jié)點梁單元 
要點 為防止軸力過大出現(xiàn)“過度的剛性行為”,常常在梁單元內(nèi)部增加一個節(jié)點,發(fā)揮“緩和”作用,增加的這個節(jié)點只有切線自由度,即切線位移,單元剛度矩陣的求解需要用到高斯數(shù)值積分。 三節(jié)點梁單元示意圖 如上圖所示,三節(jié)點梁單元共有 7 個自由度,需要兩個高斯積分點保證數(shù)值結(jié)果精度,節(jié)點順序按照上圖表示的來,中間節(jié)點為第三個節(jié)點。
2978 2 2
易公子 ??? 3年前
有限元理論基礎(chǔ)及Abaqus內(nèi)部實現(xiàn)方式研究系列45:約束關(guān)系(1)-統(tǒng)一形式 
有限元中的約束很多場景大家用的是邊界中的簡支、固支等約束,但從更廣泛的角度上講,只要表示一個節(jié)點的某個自由度依賴于其它的節(jié)點自由度或者取某個特定值,就可以稱為約束關(guān)系。只不過對固支、簡支等直接自由度=0,在有限元中直接減縮剛度陣就行,很容易求,但對節(jié)點自由度相互依賴的約束關(guān)系就比較復(fù)雜了。約束關(guān)系主要有兩類。(1) 一類是MPC點之間的約束。
4762 5 3
SnowWave02 ??? 2年前
20條/頁 
 49
49 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
