



Adams/car 中使用2D路面生成隨機(jī)等級(jí)路面的方法 
Adams_car中自帶的2D隨機(jī)等級(jí)路面為:2d_stochastic_uneven.rdf。根據(jù)軟件幫助文件或者各種視頻教程中的方法,只需要修改參數(shù)ISO_8608_ROAD_CLASS為A-H中的任意字母即可得到國(guó)標(biāo)中的隨機(jī)等級(jí)路面。然而整車仿真中所得到的加速度結(jié)果明顯錯(cuò)誤。
2701 6
歡樂(lè)多??π ??? 3年前
電動(dòng)賽車半主動(dòng)懸架系統(tǒng)仿真及實(shí)現(xiàn) 
2.1 路面譜的施加和仿真模型的建立從功率譜密度獲得路面激勵(lì)時(shí)域模型,也就是隨機(jī)路面不平度,通用的方法是將路面不平度定性為平穩(wěn)的Gaussian隨機(jī)過(guò)程。對(duì)于平穩(wěn)Gaussian隨機(jī)過(guò)程,有多種方法可以生成路面不平度時(shí)域模型。
2688 5 1
盧平luping ??? 4年前
HyperWorks仿真——隨機(jī)振動(dòng)理論簡(jiǎn)介 
以汽車在路面上的運(yùn)動(dòng)為例,我們可以測(cè)得某一次汽車在路面上的運(yùn)動(dòng)信息,這里指的是汽車在垂直于路面方向上的上下顛簸狀況(位移和加速度),但是重新測(cè)一次就會(huì)發(fā)現(xiàn),隨著路面狀況的不同,每次測(cè)得的數(shù)據(jù)都不一樣,那么我們?cè)撃媚囊淮螖?shù)據(jù)作為我們分析的輸入呢?這就是所謂的隨機(jī)性。對(duì)于隨機(jī)性的運(yùn)動(dòng),我們可以采用統(tǒng)計(jì)平均的方法來(lái)分析。
3909 6 1
小白Johnny ??? 2年前
RecurDyn成功案例:貨車運(yùn)輸中的路面不平度與貨物的累積疲勞的關(guān)系 
② 根據(jù)JIS標(biāo)準(zhǔn)中的道路高度PSD,使用ProcessNet生成非高斯隨機(jī)道路的縱斷面③ 根據(jù)隨機(jī)道路的輪廓,創(chuàng)建GRoad道路文件④ 在上述建立的環(huán)境中,進(jìn)行貨車行駛仿真分析⑤ 計(jì)算車內(nèi)包裝好貨物的累積疲勞⑥ 對(duì)數(shù)據(jù)進(jìn)行統(tǒng)計(jì)分析▎關(guān)鍵仿真技術(shù)建立貨車行駛仿真所需的貨車3D模型建立仿真所需的輪胎3D模型建立貨車行駛仿真所需的路面3D
4012
仿真客 ??? 3年前
RecurDyn成功案例:貨車運(yùn)輸中的路面不平度與貨物的累積疲勞的關(guān)系
由于包裝貨物在運(yùn)輸過(guò)程中的損傷評(píng)估很難通過(guò)真實(shí)的駕駛試驗(yàn)來(lái)進(jìn)行實(shí)現(xiàn),因此依賴于虛擬臺(tái)架試驗(yàn)來(lái)進(jìn)行仿真分析 JIS提供的是頻域的路面不平度而不是實(shí)際的路面形狀 貨物的疲勞與路面之間的關(guān)系不明確▎解決方案 基于非高斯隨機(jī)振動(dòng)理論(1),在RecurDyn/ProcessNet中編程生成道路縱斷面
2547 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
仿真APP在汽車電池包隨機(jī)振動(dòng)分析中的應(yīng)用 
圖1 新能源汽車電池包結(jié)構(gòu)示意圖汽車在路面行駛時(shí),會(huì)遭遇到較為復(fù)雜的路面工況,比如顛簸路、補(bǔ)丁路、坑洼路等,這些路面不平度所產(chǎn)生的激勵(lì)通過(guò)車身傳遞給電池包。為了確保結(jié)構(gòu)不受破壞,電池包必須具備足夠的強(qiáng)度來(lái)承受路面的隨機(jī)載荷。通常獲取電池包結(jié)構(gòu)振動(dòng)特性的途徑包括數(shù)值仿真與試驗(yàn)方法。
2261 1 2
仿真APP ??? 1年前
底盤零部件路譜轉(zhuǎn)臺(tái)架詳解 
三、試驗(yàn)場(chǎng)載荷轉(zhuǎn)臺(tái)架Block的核心準(zhǔn)則 用戶路面轉(zhuǎn)試驗(yàn)場(chǎng)路面暫且略過(guò)不提,我們重點(diǎn)討論試驗(yàn)場(chǎng)載荷轉(zhuǎn)臺(tái)架 Block。下表2為某車型橫向穩(wěn)定桿在一些典型試驗(yàn)場(chǎng)路面下的載荷。表2 某車型橫向穩(wěn)定桿在部分典型路面上的隨機(jī)載荷譜(實(shí)際上這里放的是微應(yīng)變譜) 我們對(duì)動(dòng)態(tài)載荷進(jìn)行觀察,就會(huì)發(fā)現(xiàn)大多數(shù)動(dòng)態(tài)載荷存在隨機(jī)性,即無(wú)明顯的規(guī)律可以尋找。
2109 3 1
辰巳午未 ??? 2年前
應(yīng)用Simulink進(jìn)行懸架系統(tǒng)雙質(zhì)量系統(tǒng)仿真-以及幅頻特性分析詳細(xì)講解 

本節(jié)課主要講解了如何使用matlab Simulink構(gòu)建二自由度懸架運(yùn)動(dòng)學(xué)方程,保姆級(jí)教學(xué),同時(shí)用matlab如何進(jìn)行車身加速度、車身速度、車身位移對(duì)路面激勵(lì)q的幅頻特性分析,這里要注意的是,該方法與編寫運(yùn)動(dòng)學(xué)方程計(jì)算傳遞函數(shù)的方法不一樣,編寫傳遞函數(shù)的方法上一節(jié)講解了,那種方法是二自由度懸架系統(tǒng)固有特性,與路面激勵(lì)q大小無(wú)關(guān),而使用Simulink計(jì)算的時(shí)候,通常獲取的是激勵(lì)與響應(yīng)的加速度、速度
326
東邪不邪 ??? 3年前
關(guān)于隨機(jī)振動(dòng)試驗(yàn)的探討 附隨機(jī)振動(dòng)試驗(yàn)應(yīng)用技術(shù)胡志強(qiáng)下載 
隨機(jī)振動(dòng)是隔振器在選型時(shí)經(jīng)常會(huì)遇到的一種振動(dòng)類型?,F(xiàn)實(shí)中隨機(jī)振動(dòng)到處可見,如車輛在路面上行駛時(shí),路面產(chǎn)生的振動(dòng)就是一種很典型的隨機(jī)振動(dòng);除此之外,還有高鐵在軌道上行駛時(shí)的振動(dòng),高層建筑在陣風(fēng)或地震作用下發(fā)生的振動(dòng);飛機(jī)在飛行時(shí)的振動(dòng);船舶在波浪中的振動(dòng)都是隨機(jī)振動(dòng)。很多國(guó)際標(biāo)準(zhǔn)和國(guó)家標(biāo)準(zhǔn)對(duì)設(shè)備以及隔振器的可靠性和疲勞壽命的驗(yàn)證也是通過(guò)隨機(jī)振動(dòng)來(lái)實(shí)現(xiàn)。
3096 22 18
有限人生 ??? 4年前
1/4懸架二自由度運(yùn)動(dòng)學(xué)方程——通過(guò)狀態(tài)方程的方法在Simulink里面構(gòu)建模型 
本節(jié)課主要是在前兩節(jié)課的基礎(chǔ)上,通過(guò)狀態(tài)方程的方法,在simulink里面構(gòu)建1/4懸架二自由度運(yùn)動(dòng)學(xué)方程,然后對(duì)懸架的幅頻特性進(jìn)行分析。以車身加速度對(duì)路面位移響應(yīng)的幅頻特性為例,進(jìn)行闡述,保姆級(jí)教學(xué)。。。附帶simulink模型以及matlab求解幅頻特性的方法,歡迎大家一起學(xué)習(xí)探討并進(jìn)行指正。
543 2
東邪不邪 ??? 3年前
adams_car_matlab_整車模型_平順性路面_聯(lián)合仿真_半主動(dòng)控制力 
本課程與一般論文里的半懸架聯(lián)合仿真不同,以B級(jí)路面勻速工況為例, 詳細(xì)教授了整車模型在勻速直線運(yùn)動(dòng)時(shí)的減振器半主動(dòng)控制力與matlab simulink的聯(lián)合仿真。并解決了直接使用仿真結(jié)果.m文件時(shí) simulink里面output項(xiàng)包括testrig下默認(rèn)參數(shù)的30余項(xiàng)output接口,我們只需要保留使用懸架動(dòng)撓度,車身垂向加速度,車身垂向速度,懸架兩端相對(duì)速度接口。
2186 11
東邪不邪 ??? 4年前
ADAMS/car中利用3Dspline路面生成等級(jí)路面的方法 
ADAMS的幫助文檔告訴我們使用3Dspline路面模型可以建立關(guān)鍵詞為”Roughness”隨機(jī)等級(jí)路面,需要輸入的三個(gè)主要參數(shù)為, GE Elevation PSD parameter. GS Velocity PSD parameter.
2624 2
歡樂(lè)多??π ??? 3年前
二分之一車輛模型的微分方程數(shù)學(xué)公式推導(dǎo)及Simulink建模和仿真分析視頻教程 
,以及對(duì)應(yīng)的Simulink動(dòng)力學(xué)模型的搭建,另外,還包含了減速帶路面和A-G級(jí)路面的模型搭建及平順性仿真分析。(從頭操作到尾的實(shí)例教程,感興趣的可以跟著作者一塊做~)
?
?
1394
辰巳午未 ??? 2年前
四分之一車輛模型微分方程公式推導(dǎo)&Simulink動(dòng)力學(xué)模型搭建及振動(dòng)舒適性仿真分析實(shí)例視頻教程 
本課程詳細(xì)介紹了四分之一車輛模型的微分方程公式推導(dǎo)及Simulink,同時(shí)介紹了懸架隔振率、懸架動(dòng)撓度和輪胎動(dòng)載荷的傳遞函數(shù)仿真分析方法;另外還介紹了A-H級(jí)路面的建模方法及不同懸架在不同路面振動(dòng)舒適性優(yōu)劣的仿真評(píng)估方法。
434
辰巳午未 ??? 2年前
【技術(shù)貼】使用VSM?實(shí)現(xiàn)車輛操穩(wěn)的精準(zhǔn)控制 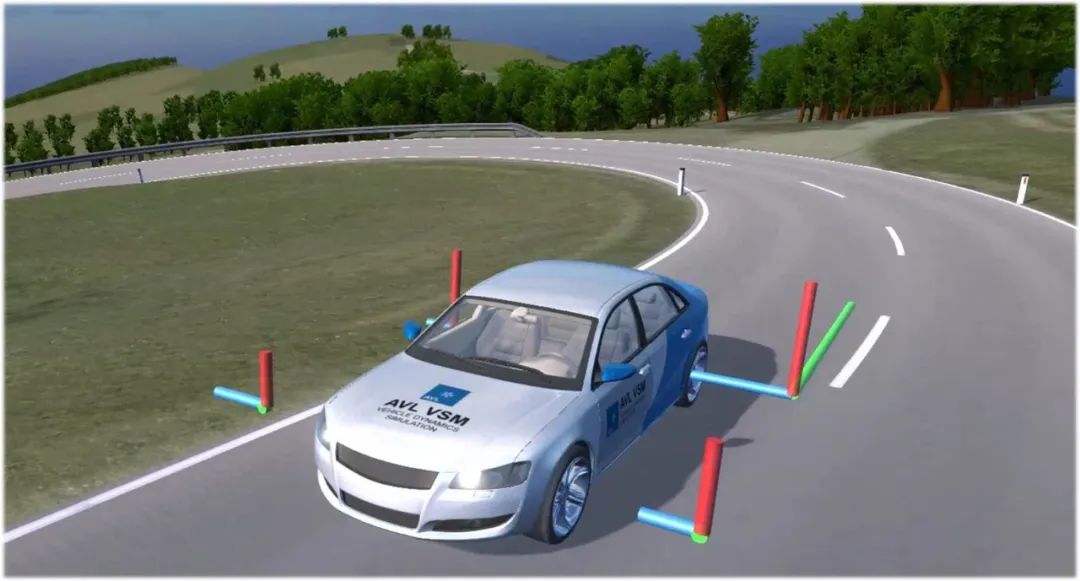
當(dāng)安裝限滑差速器的汽車行駛在左、右附著系數(shù)不相等的路面上時(shí),處在低附著系數(shù)路面上的驅(qū)動(dòng)車輪就比較容易出現(xiàn)空轉(zhuǎn)打滑,在此情況下,限滑差速器通過(guò)自身特殊的結(jié)構(gòu),使處在較高附著系數(shù)路面的驅(qū)動(dòng)車輪獲得更大的驅(qū)動(dòng)力,從而使汽車重新獲取動(dòng)力,增強(qiáng)汽車的通過(guò)性以及更好的駕駛體驗(yàn);同時(shí)隨著汽車電子的發(fā)展,具有主動(dòng)控制功能的差速器(eLSD)被越來(lái)越多的廠商開始接受,主動(dòng)差速器能夠根據(jù)車輛運(yùn)行工況及路面狀態(tài),主動(dòng)分配驅(qū)動(dòng)輪上的驅(qū)動(dòng)力矩
10053 2
AVL先進(jìn)模擬技術(shù) ??? 3年前
基于MATLAB的直接序列擴(kuò)頻通信系統(tǒng)的仿真模型 
四、結(jié)語(yǔ)本文研究直接序列擴(kuò)展頻譜通信系統(tǒng)的擴(kuò)頻過(guò)程和抗干擾性能,使用MATLAB中的SIMULINK工具箱設(shè)計(jì)與仿真直接序列擴(kuò)展頻譜通信系統(tǒng),仿真實(shí)現(xiàn)了偽噪聲系統(tǒng)從偽隨機(jī)PN碼的產(chǎn)生到擴(kuò)頻、調(diào)制,信道中加入噪聲,解擴(kuò)接收信號(hào)最后解調(diào)還原成原始窄帶信號(hào)的過(guò)程。觀察了原始信號(hào)、擴(kuò)頻、解擴(kuò)等幾個(gè)過(guò)程的頻譜圖,并對(duì)這些頻譜圖進(jìn)行對(duì)比,分析信源發(fā)射的信號(hào)頻譜從拓寬到還原的過(guò)程。
4906 3 1
Matlab心得交流 ??? 2年前
高保真仿真地圖生成:UE+Blender協(xié)同編輯的實(shí)現(xiàn)路徑 
aiSim Plugin提供了兩套高效的解決方案:1、基于UE Foliage的隨機(jī)鋪設(shè):通過(guò)UE原生的Foliage Mode,可將特定靜態(tài)網(wǎng)格體轉(zhuǎn)化為Foliage實(shí)例。該模式下,用戶能以筆刷形式在指定區(qū)域隨機(jī)、大面積地放置和消除植被、石塊等元素,并通過(guò)調(diào)整密度、尺寸、姿態(tài)等參數(shù),實(shí)現(xiàn)自然、多樣化的分布效果。
2378
康謀keymotek ??? 2月前
電動(dòng)汽車仿真系列-基于Simulink的防抱死制動(dòng)系統(tǒng) 
1、引言防抱死制動(dòng)系統(tǒng)(ABS)是一種汽車安全系統(tǒng),允許機(jī)動(dòng)車車輪在制動(dòng)時(shí)根據(jù)駕駛員輸入與路面保持牽引接觸,防止車輪抱死并避免失控打滑。防抱死制動(dòng)系統(tǒng)通常提供改進(jìn)的車輛控制,并減少在干燥和濕滑路面上的停車距離。該系統(tǒng)獨(dú)立于踏板力調(diào)節(jié)制動(dòng)管路壓力,使車輪速度回到最佳制動(dòng)性能所需的滑移水平范圍。
3445 5 4
糜桌 ??? 4年前
案例 | 沃爾沃汽車公司使用Adams進(jìn)行耐久性道路載荷仿真的新方法 
腳本化的工作流程將與Simulink服務(wù)器建立TCP / IP連接,并啟動(dòng)Adams Car 控制求解器。通過(guò)TCP / IP連接,Adams / Car求解器與運(yùn)行Simulink模型的計(jì)算機(jī)通信。整個(gè)過(guò)程是,啟動(dòng)Simulink服務(wù)器,像往常一樣生成Adams求解器文件,在本地或集群上提交聯(lián)合仿真作業(yè)命令。
4349 2
Cruise ??? 3年前
simulink四自由度俯仰或者側(cè)傾半車模型搭建以及幅頻響應(yīng)分析 
這一節(jié)主要講解如何利用simulink通過(guò)搭積木方式建立四自由度半車模型,此模型通用俯仰或者側(cè)傾運(yùn)動(dòng),四個(gè)自由度分別是前后輪或左右輪的簧下位移,簧上質(zhì)量位移,以及俯仰角或側(cè)傾角,一共四個(gè)自由度,該模型后期可以添加半主動(dòng)控制力進(jìn)去進(jìn)行半主動(dòng)控制策略分析。保姆級(jí)教學(xué)。。。。路面激勵(lì)基于空間功率譜與時(shí)間功率譜轉(zhuǎn)換建立,源程序附在課程下邊,有需要的同學(xué)自行下載,參考的論文是:孫攀.
784 2
東邪不邪 ??? 3年前
20條/頁(yè) 
跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
