【技術(shù)貼】使用VSM?實現(xiàn)車輛操穩(wěn)的精準(zhǔn)控制
 2022年8月2日 15:02
2022年8月2日 15:02瀏覽:10049
隨著汽車市場競爭的加劇,消費(fèi)者在選擇汽車產(chǎn)品時愈來愈關(guān)注車輛的駕乘品質(zhì)及行駛安全。對于車輛操穩(wěn)性能的開發(fā)來講,通過對驅(qū)動輪驅(qū)動扭矩的控制來改善車輛的操縱穩(wěn)定性一直是研發(fā)的熱點(diǎn),其中限滑差速器和近年流行的扭矩矢量控制(Torque Vectoring)技術(shù)的使用可以在不損害車輛的駕駛樂趣的前提下有效的提高車輛的行駛穩(wěn)定性。
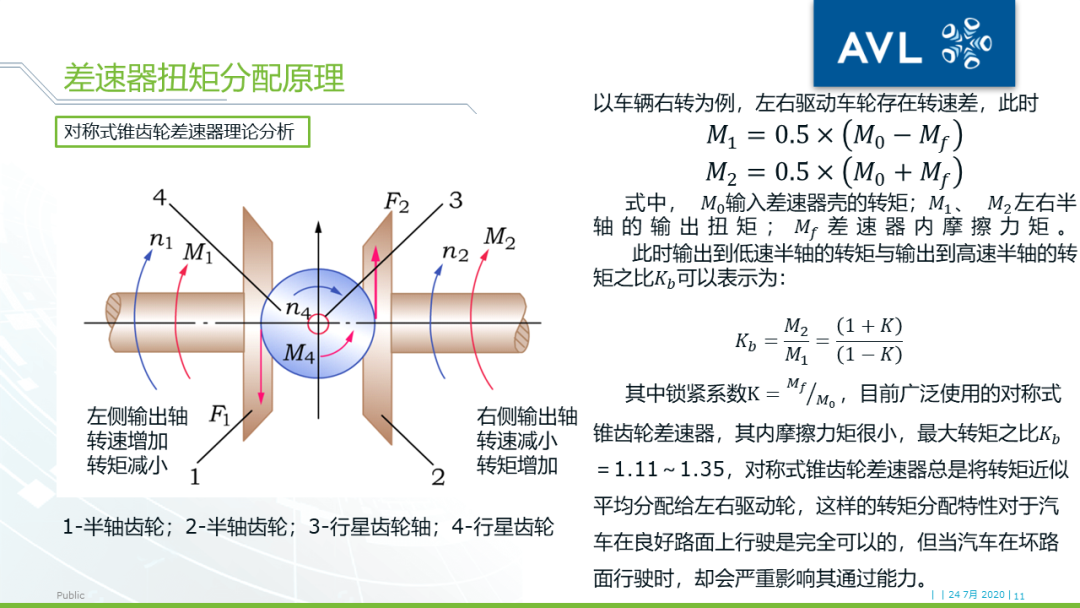
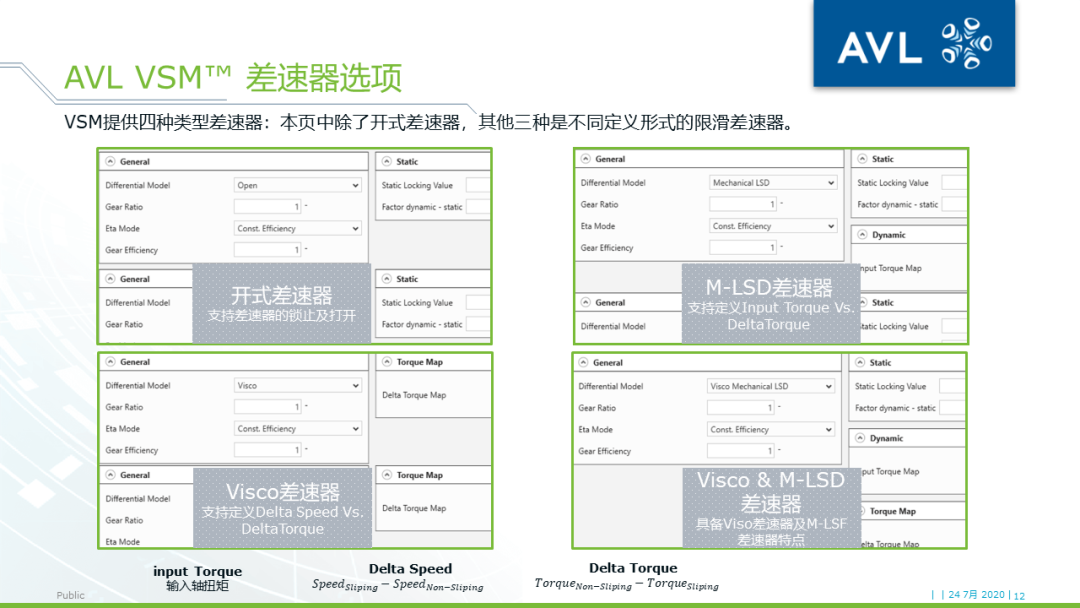
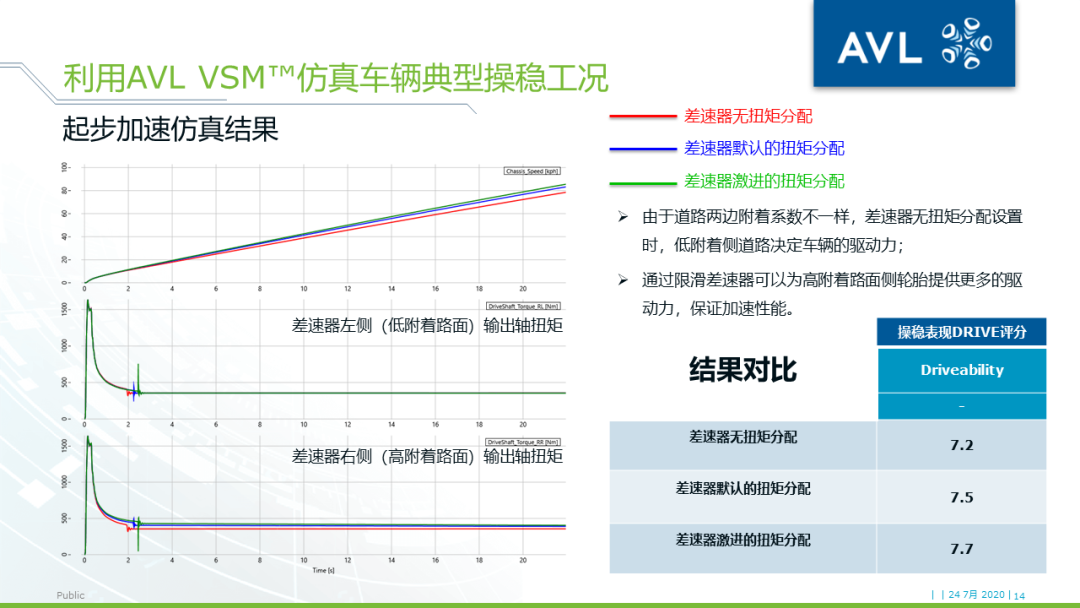
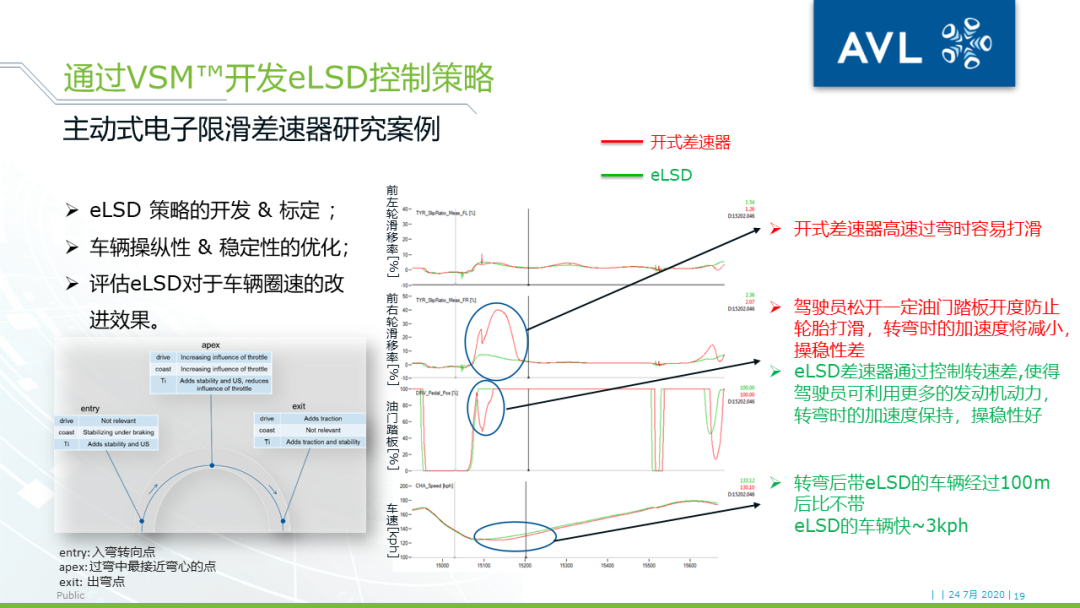
限滑差速器相比于普通差速器,依靠自身結(jié)構(gòu)特點(diǎn),改變普通差速器的扭矩分配特性。當(dāng)安裝限滑差速器的汽車行駛在左、右附著系數(shù)不相等的路面上時,處在低附著系數(shù)路面上的驅(qū)動車輪就比較容易出現(xiàn)空轉(zhuǎn)打滑,在此情況下,限滑差速器通過自身特殊的結(jié)構(gòu),使處在較高附著系數(shù)路面的驅(qū)動車輪獲得更大的驅(qū)動力,從而使汽車重新獲取動力,增強(qiáng)汽車的通過性以及更好的駕駛體驗;同時隨著汽車電子的發(fā)展,具有主動控制功能的差速器(eLSD)被越來越多的廠商開始接受,主動差速器能夠根據(jù)車輛運(yùn)行工況及路面狀態(tài),主動分配驅(qū)動輪上的驅(qū)動力矩,充分利用驅(qū)動車輪與路面間的附著條件,能夠有效提高車輛動力性、通過性及操縱穩(wěn)定性。
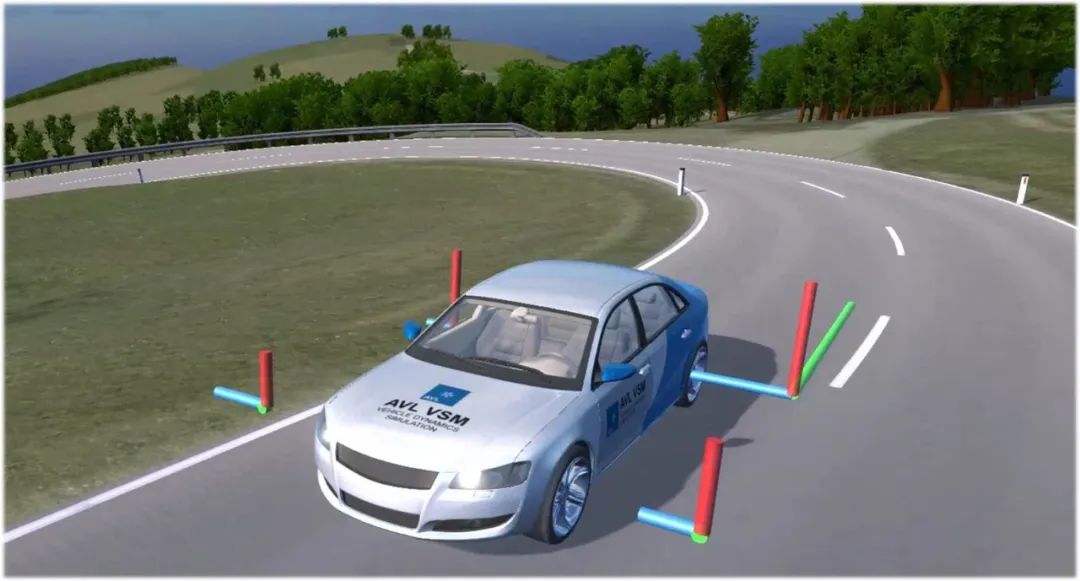
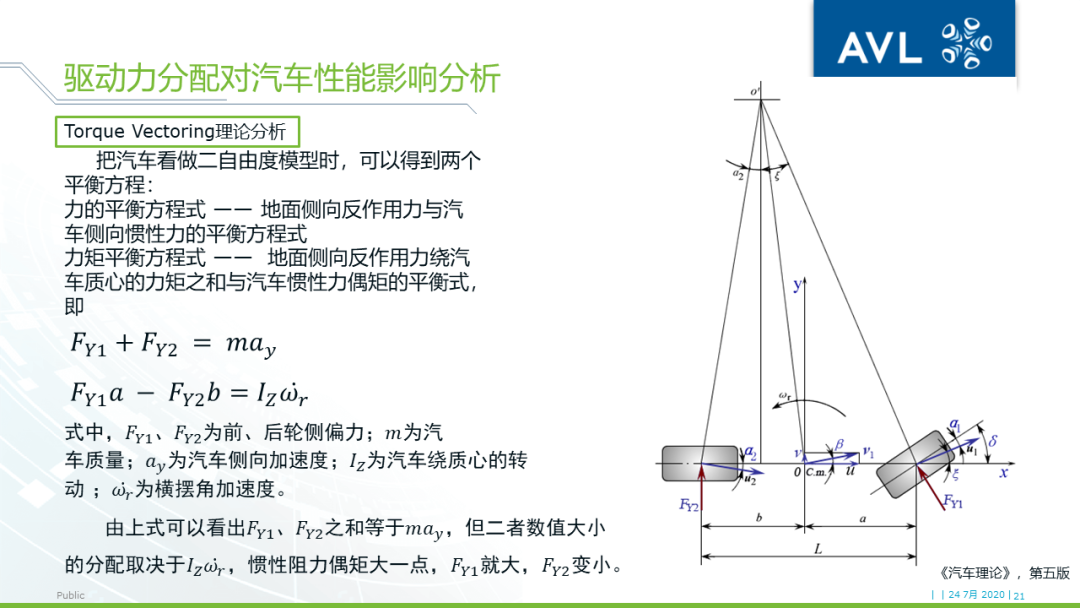
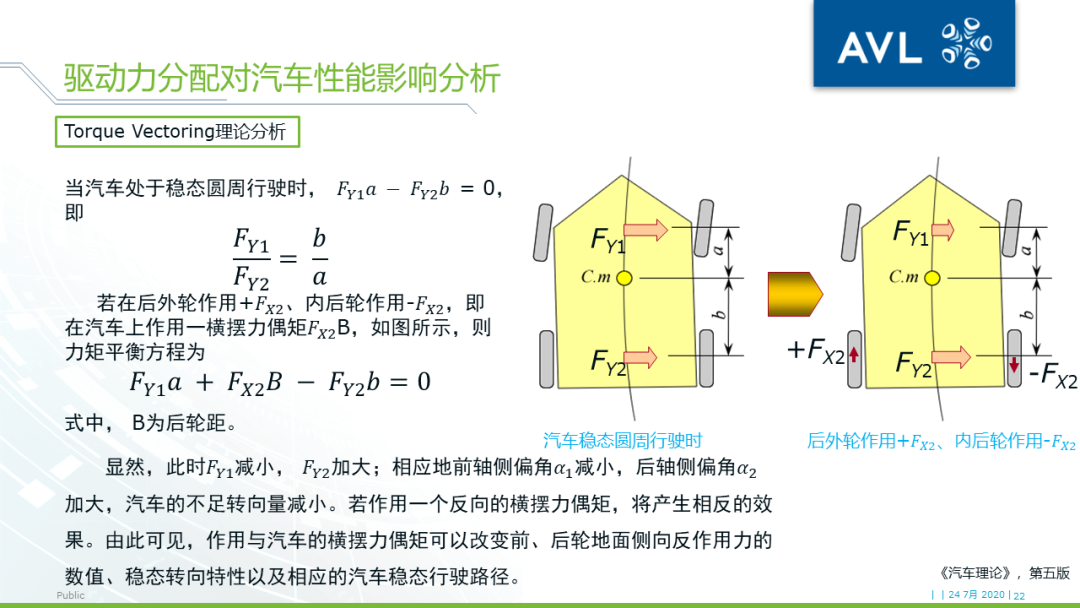
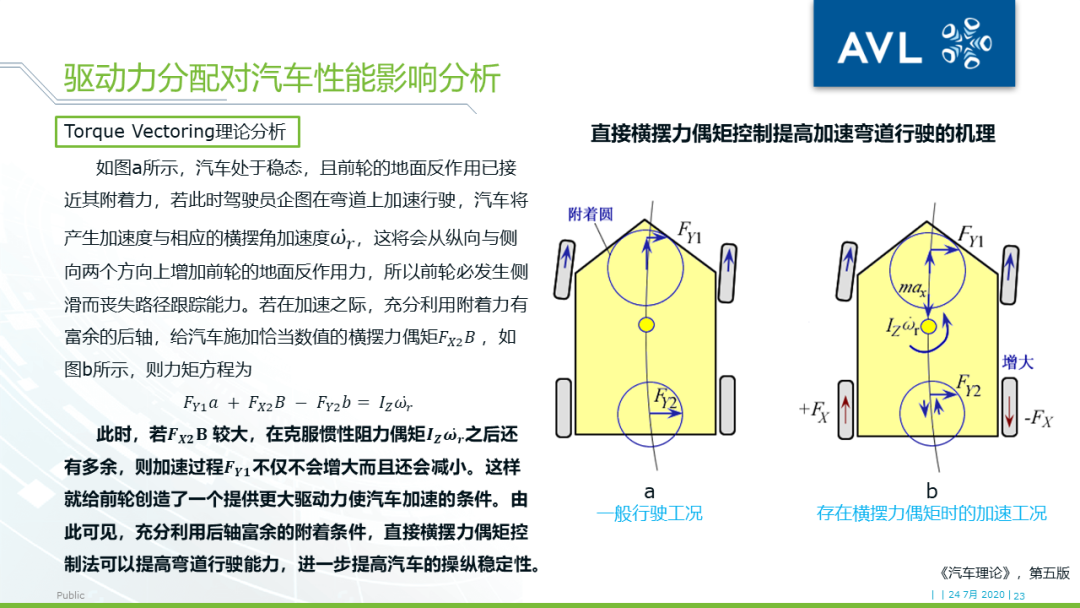
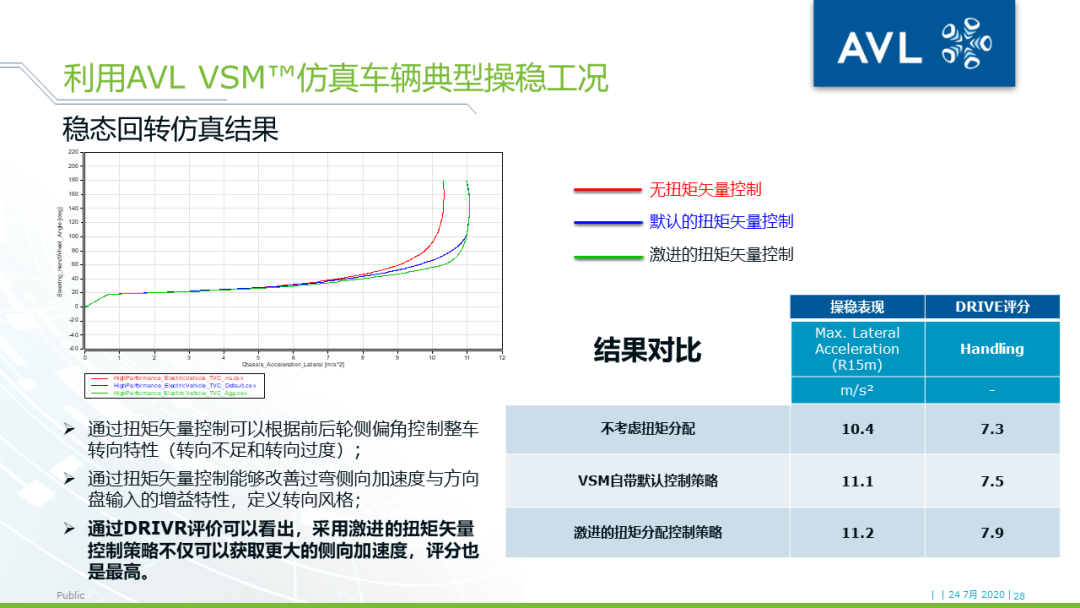
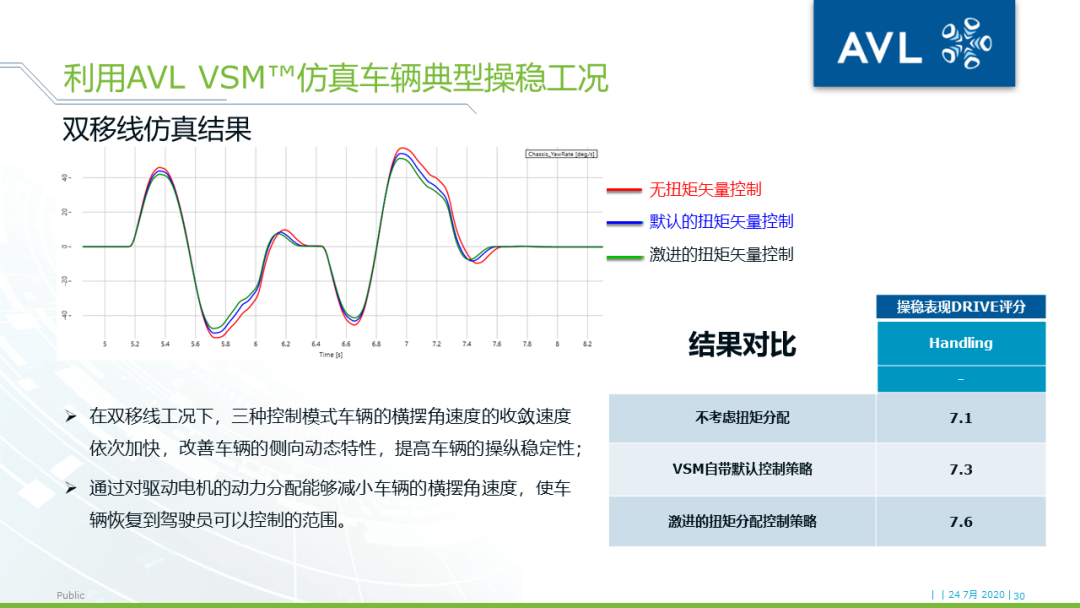
在車輛過彎行駛過程中,通過電機(jī)驅(qū)動控制改變內(nèi)外側(cè)驅(qū)動力,產(chǎn)生橫擺力偶矩,進(jìn)一步提高汽車的操縱穩(wěn)定性,這種在動態(tài)行駛中調(diào)節(jié)單個車輪力的控制功能通常稱為扭矩矢量(Torque Vectoring)控制,采用該技術(shù)在保證車輛高速轉(zhuǎn)彎行駛的安全性的同時,可以減少傳統(tǒng)通過制動力參與調(diào)節(jié)車輛穩(wěn)定性而帶來的能量損失及制動系統(tǒng)的磨損。
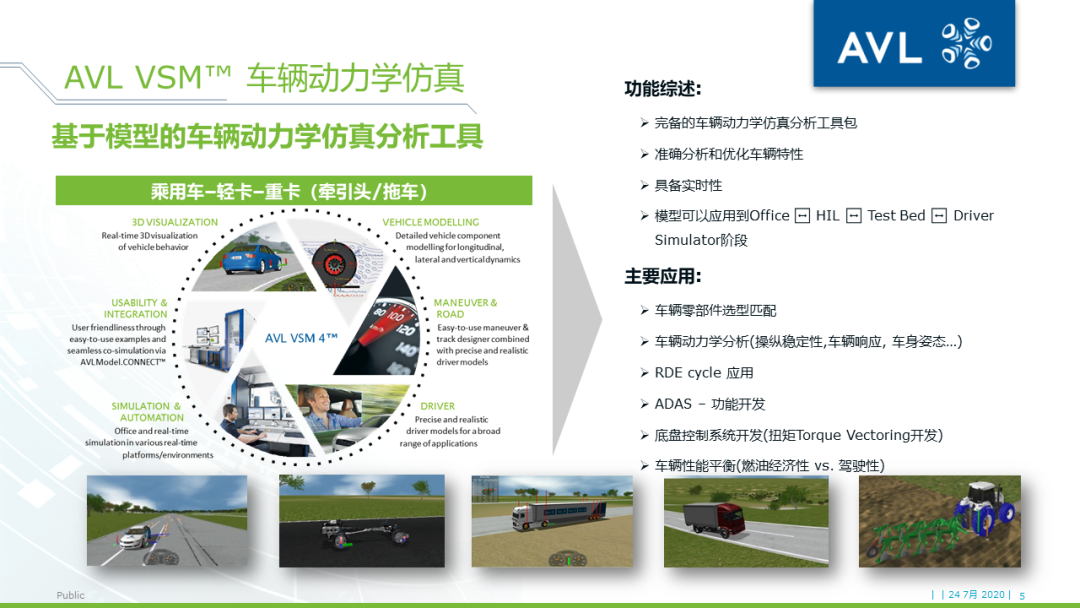
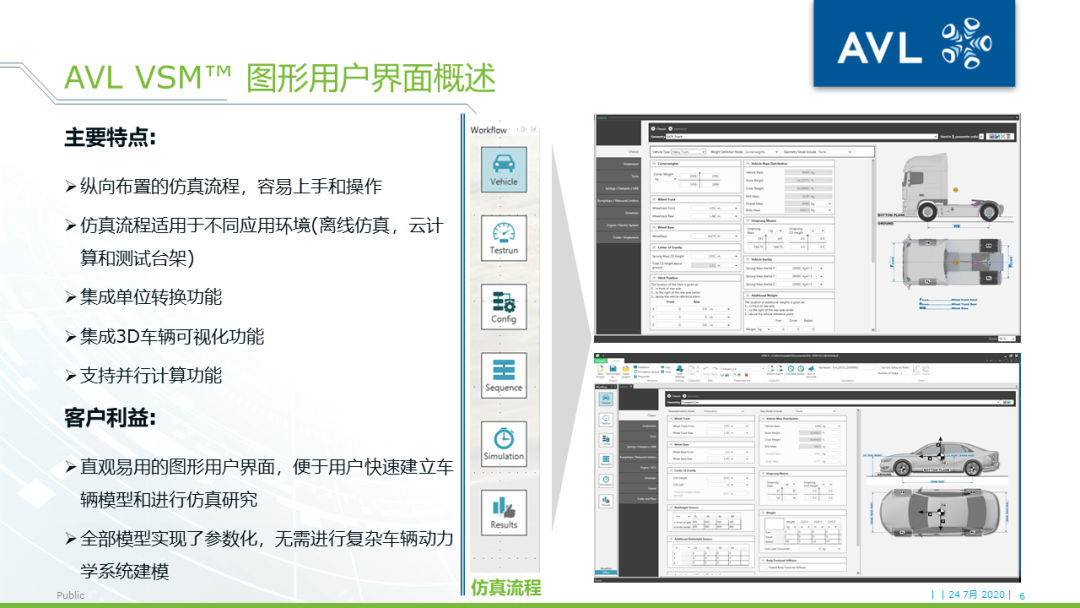
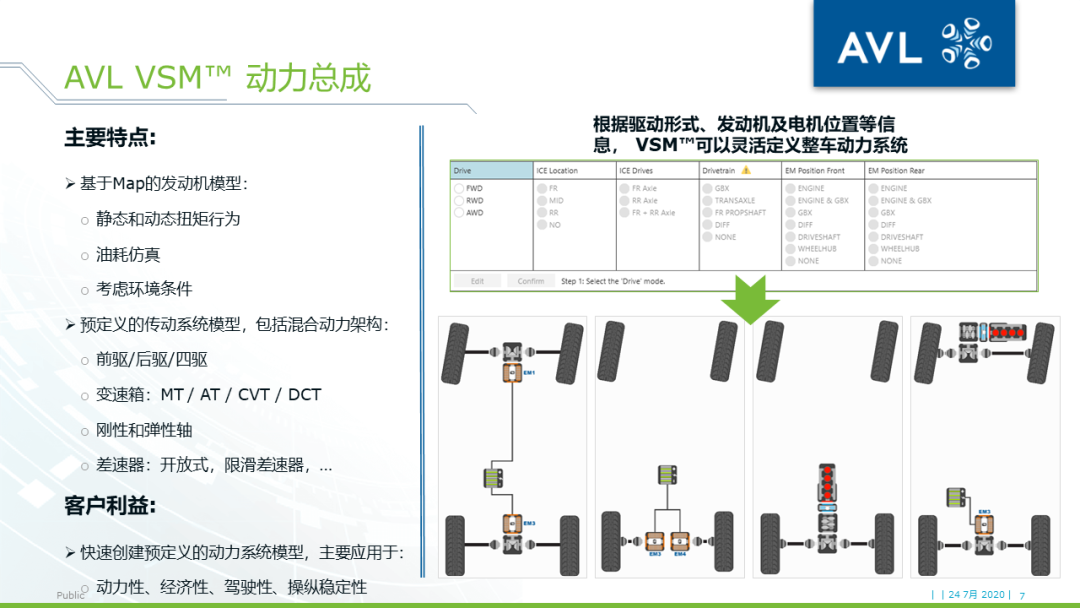
本次技術(shù)貼詳細(xì)介紹AVL
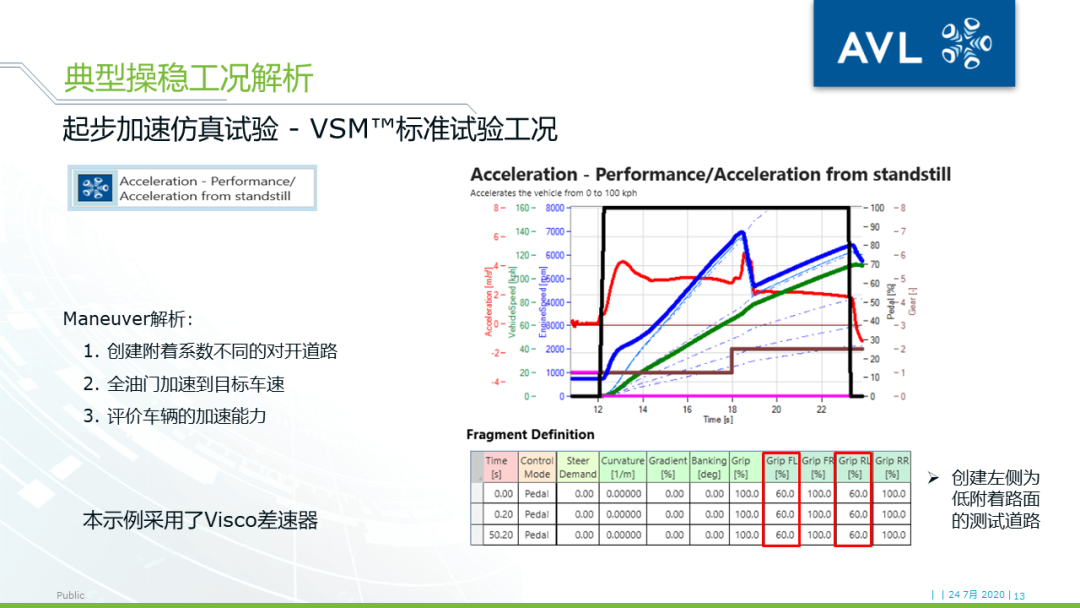
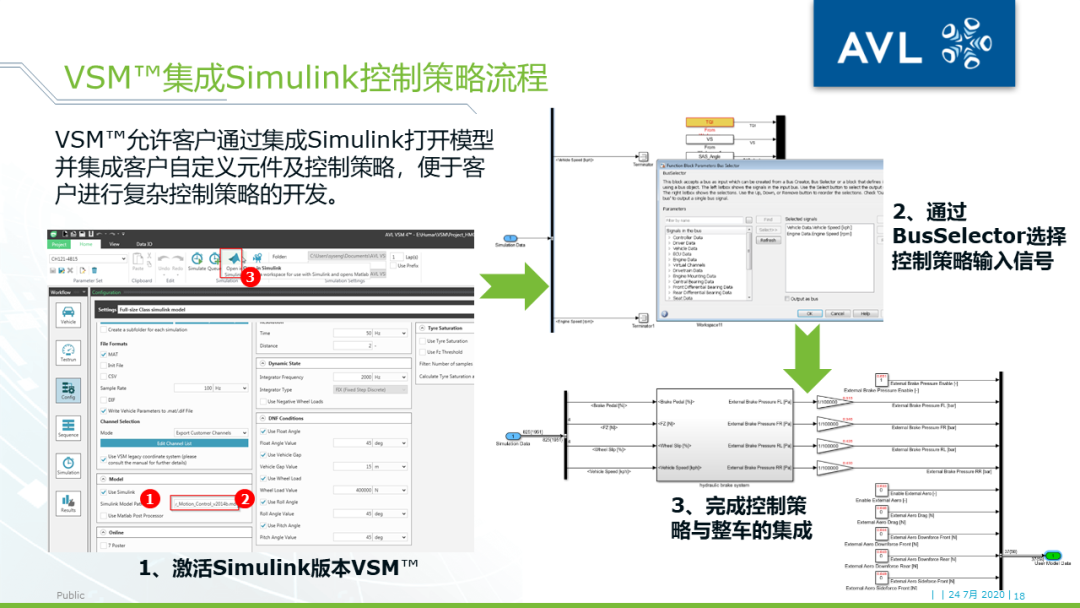
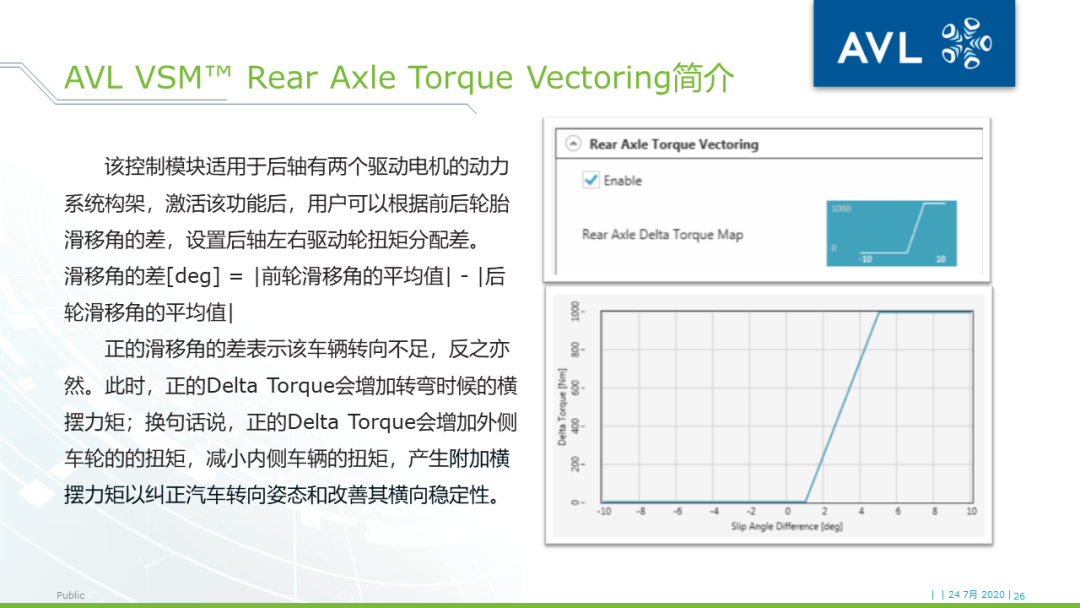
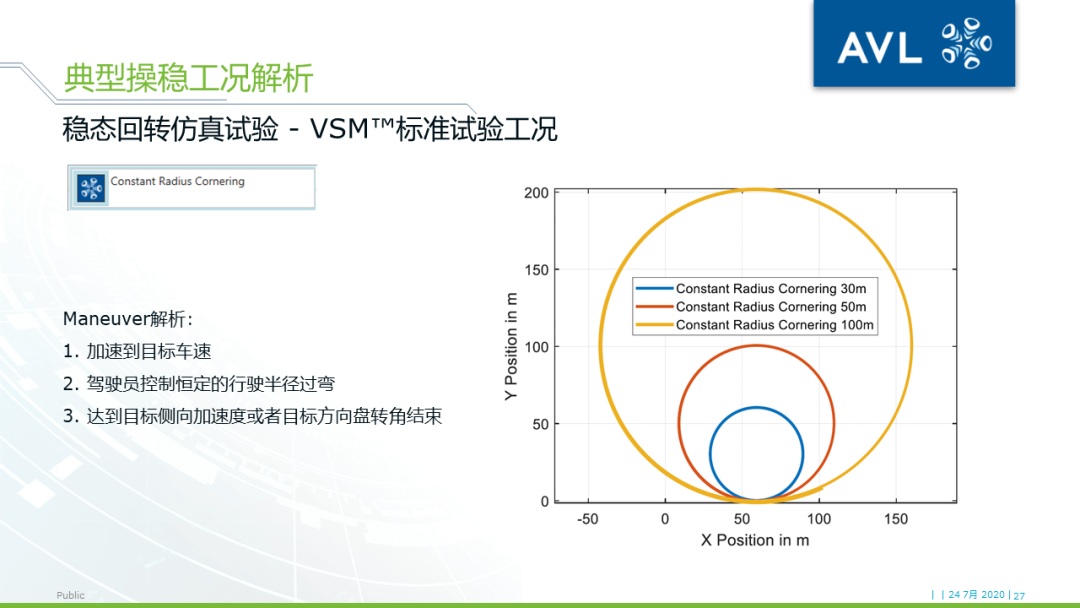
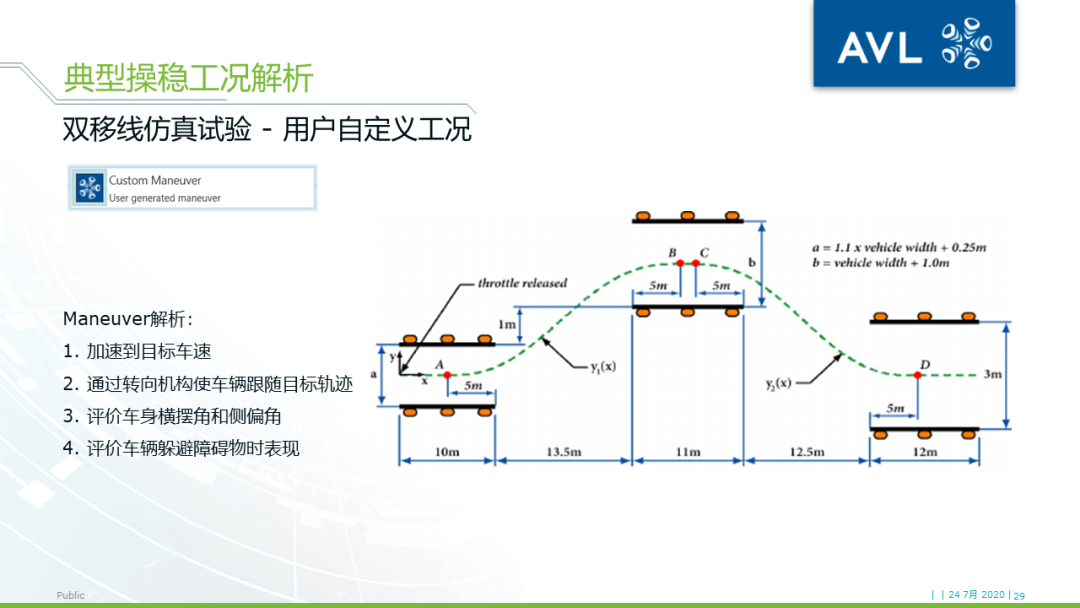
車輛動力學(xué)仿真工具 VSM?中限滑差速器和Torque Vectoring的功能及應(yīng)用場景,首先采用AVL VSM? 獨(dú)有的Maneuver Designer創(chuàng)建穩(wěn)態(tài)回轉(zhuǎn)及雙移線工況;其次,在AVL VSM? 通過激活和取消限滑差速器及Torque Vectoring功能,分析其對車輛性能的影響,同時介紹VSM? 集成Simulink控制策略,完成電子限滑差速器(eLSD)控制策略的開發(fā);最后,結(jié)合AVL DRIVE?以客觀評分的方式對結(jié)果進(jìn)行驗證。











技術(shù)鄰APP
工程師必備
























