



ADAMS中關(guān)于連桿角度的測量
前言 最近在學(xué)機(jī)械原理MATLAB輔助分析,第一個鉸鏈四桿機(jī)構(gòu)想用ADAMS求解一些,關(guān)于θ2角度的測量產(chǎn)生了問題,不知道怎么測量(我ADAMS水平也一般)。問題 別的連桿的角度,我都會用MARKER點(diǎn)測出來,有大佬棟嗎,知識付費(fèi)也可以,比較喜歡學(xué)習(xí)這個。
2895 1
原來金輪也在大師心里面 ??? 2年前
adams如何尺寸數(shù)據(jù)大量導(dǎo)入進(jìn)行仿真測量?
我現(xiàn)在有曲柄滑塊機(jī)構(gòu)的曲柄以及對應(yīng)連桿尺寸的200組數(shù)據(jù),adams如何利用這些數(shù)據(jù)進(jìn)行機(jī)構(gòu)尺寸的修改并讓它自己進(jìn)行滑塊的位移速度加速度等的測量并導(dǎo)出數(shù)據(jù)?意思差不多就是讓adams進(jìn)行批處理
2065 1
桃鶴 ??? 3年前
adams/view如何建立一個皮帶下帶動40個皮帶輪旋轉(zhuǎn)?
求Adams/view2016大神,如何建立一個皮帶下帶動40個皮帶輪旋轉(zhuǎn),外加兩個導(dǎo)向輪?
1989 1 1
老沖_4343 ??? 3年前
基于Adams的六足直立式步行機(jī)器人運(yùn)動仿真分析 
在中間步行腿機(jī)構(gòu)仿真運(yùn)動過程中,通過測量可以得到中間步行腿機(jī)構(gòu)中各連桿桿件的的實(shí)時運(yùn)動特征,如:lOF 角度、lDE 角度、角速度、角加速度隨時間變化的測量曲線,lEF(步行腿2)、lFG角度、角速度、角加速度隨時間變化的測量曲線和運(yùn)動擺角范圍,以及l(fā)DE角度隨曲柄lOF角度變化的測量曲線,并可以提取測量曲線上任意點(diǎn)的特性值,如最大值、最小值、平均值等,如圖5所示。
4178 7 8
仿真客 ??? 3年前
基于ADAMS的點(diǎn)按手法運(yùn)動仿真 
圖5 機(jī)器人手臂運(yùn)動軌跡3 仿真結(jié)果利用ADAMS提供的功能,可以很方便地得到機(jī)械臂各個關(guān)節(jié)角的運(yùn)動曲線,這里以關(guān)節(jié)3為例。利用ADAMS中“measure”功能測量第3個關(guān)節(jié)角的變化。如圖6所示。圖6中,縱坐標(biāo)是由初始位置轉(zhuǎn)過的角度。將圖6所示的曲線導(dǎo)入ADAMS后處理模塊中,得到曲線上的關(guān)節(jié)角的具體值。由于仿真42 s,步長為0.2 s,那么總共得到210個點(diǎn)。
3012 2
擺渡人張 ??? 2年前
案例分享 | 基于Adams的側(cè)風(fēng)穩(wěn)定性極端工況仿真 
由于空氣動力學(xué)對車輛自身的平移和轉(zhuǎn)動影響較小,CFD模型沒有考慮由于側(cè)風(fēng)引起的車輛姿態(tài)的任何變化,例如繞其軸的旋轉(zhuǎn)和偏離標(biāo)稱航向的偏差。 這種方法可以減輕模型復(fù)雜性和計(jì)算資源。 多體動力學(xué)模型是在Adams Chassis中構(gòu)建的。Adams Chassis為汽車制造商及其供應(yīng)商提供了專門的建模環(huán)境,以快速建立全車和車輛子系統(tǒng)的模型。
2108 1
MSC Cradle CFD ??? 3年前
刮板輸送機(jī)過彎曲段工況下力學(xué)特性研究 
為了獲得更好的測量模擬結(jié)果,給仿真模型裝配7個水平角度測量MODEL-100-ANGLE,作用是測量中部槽水平旋轉(zhuǎn)角度;于第1節(jié)中部槽處裝配1個位移測量MODEL-100-DPY,作用是測量推桿推移的直線距離。
2395 8
擺渡人張 ??? 2年前
ADAMS耦合副的說明及使用 
END 文章來源: ADAMS及ANSYS等機(jī)械仿真
5538 6
擺渡人張 ??? 2年前
設(shè)計(jì)仿真 | Adams 新功能全面解析 
Adams/Machinery中的GearAT:支持通過偏差定義每個齒的微幾何,支持通過測量數(shù)據(jù)定義圓柱齒輪的齒形,支持通過測量數(shù)據(jù)定義漸開線花鍵的齒形;增強(qiáng)Romax導(dǎo)入到Adams的功能。Adams/Durability新增雨流計(jì)數(shù)方法;新增聲壓恢復(fù)。01-Adams/Car新功能1. 通訊器圖譜。
3863
上海庭田信息科技有限公司 ??? 1年前
雙折射取向?qū)訉Ψ轿唤清^定能的測量影響 
[2,3], 取向?qū)拥墓庵码p折射是很重要的,它對于光在LC盒中傳播時的偏振平面旋轉(zhuǎn)角度也有貢獻(xiàn)。
2100 1
追光ing ??? 9月前
基于ADAMS的助老起升裝置的運(yùn)動學(xué)仿真分析 
2.2 連接設(shè)置 由于此產(chǎn)品需進(jìn)行運(yùn)動分析,故設(shè)置完模型后需 進(jìn)行運(yùn)動副連接設(shè)置,根據(jù) ADAMS 軟件運(yùn)動庫內(nèi) 容,裝配體主要由旋轉(zhuǎn)副、移動副、固定副組成,具體 類型及相關(guān)構(gòu)件信息見表 2。
2600 5
擺渡人張 ??? 2年前
雙折射取向?qū)訉Ψ轿唤清^定能的測量影響 
[2,3], 取向?qū)拥墓庵码p折射是很重要的,它對于光在LC盒中傳播時的偏振平面旋轉(zhuǎn)角度也有貢獻(xiàn)。
2246
信光嗎 ??? 9月前
基于ADAMS的懸架側(cè)傾與轉(zhuǎn)向仿真 
變化 輪距變化(Track Change) 3.2 轉(zhuǎn)向仿真工況 基于adams steering進(jìn)行懸架轉(zhuǎn)向工況定義,定義轉(zhuǎn)向角度為±360°(按設(shè)計(jì)狀態(tài)或者實(shí)驗(yàn)臺載荷) 測量參數(shù): 前輪轉(zhuǎn)向角(Toe Angle) 阿克曼角(Ackermann Angel) 4.
4031 2 1
320科技工作室 ??? 10月前
Adams與Matlab聯(lián)合仿真示例 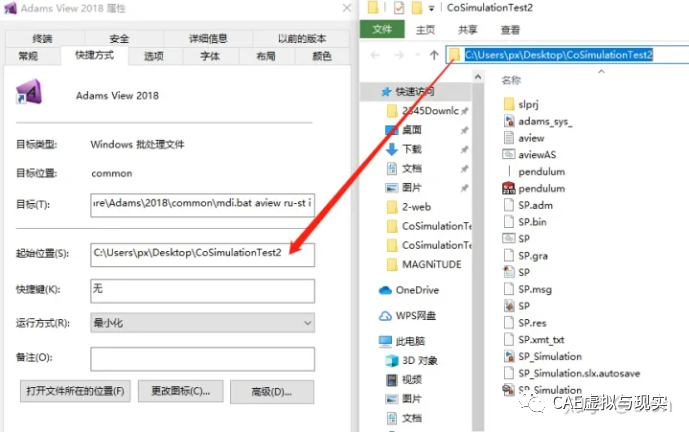
運(yùn)行adams_sys指令,調(diào)出adams的simulink系統(tǒng),中間黃色的模塊(adams_sub)就是我們需要的機(jī)械系統(tǒng)模型。 創(chuàng)建一個新的simulink文件,并添加需要的模塊進(jìn)去,構(gòu)建仿真系統(tǒng),如圖所示,這里采用PD控制器,控制桿到某一個固定的角度。
3579 3 2
仿真客 ??? 3年前
和機(jī)械式旋轉(zhuǎn)激光雷達(dá)相比,MEMS固態(tài)激光雷達(dá)有哪些優(yōu)勢和劣勢? 
激光雷達(dá)是通過發(fā)射和接收激光,測量激光信號的時間差或相位差來感知外界障礙物的高度、角度和距離等信息,通過水平旋轉(zhuǎn)掃描來測角度,并根據(jù)這兩個參數(shù)建立二維的極坐標(biāo)系,然后通過獲取不同俯仰角度信號獲得三維中的高度信息,最后通過軟件繪制成機(jī)器能夠識別的三維模型,類似于我們的眼睛。
3406
駕駛哥 ??? 4年前
【如何判斷角度傳感器的好壞】- 米思米機(jī)械設(shè)備知識分享 
一起來學(xué)習(xí)如何判斷傳感器中角度傳感器的好壞 1、線性范圍角度傳感器的線形范圍是指輸出與輸入成正比的范圍。以理論上講,在此范圍內(nèi),靈敏度保持定值。傳感器的線性范圍越寬,則其量程越大,并且能保證一定的測量精度。在選擇傳感器時,當(dāng)傳感器的種類確定以后首先要看其量程是否滿足要求。但實(shí)際上,任何傳感器都不能保證絕對的線性,其線性度也是相對的。
2028
MISUMI米 ??? 2年前
三坐標(biāo)測量技術(shù)解析:從基礎(chǔ)原理到斜孔測量難點(diǎn)突破 
斜孔測量技術(shù)難點(diǎn)就在于: 1法矢方向約束:測量時測頭必須沿斜孔軸線方向(法矢方向)觸測,否則會產(chǎn)生投影誤差; 2坐標(biāo)系轉(zhuǎn)換:工件隨意放置時,斜孔坐標(biāo)系與機(jī)床坐標(biāo)系存在空間角度偏差; 3測頭運(yùn)動限制:固定式測頭無法自由旋轉(zhuǎn),難以對準(zhǔn)傾斜表面。
2287
深圳市中圖儀器股份有限公司 ??? 9月前
旋轉(zhuǎn)命令在CAD軟件中的應(yīng)用 
此時,對象將按照你指定的參照方向和角度進(jìn)行旋轉(zhuǎn)。在這個例子中,矩形將參照向左的水平方向旋轉(zhuǎn)120度。
2440
自學(xué)土木網(wǎng) ??? 1年前
利用Adams/view搭建整車動力學(xué)模型 附ADAMS-View創(chuàng)建車輛輪胎路面步驟下載 
由于adams/View中沒法像car中更改輪胎的定位參數(shù),如外傾角和前束角,所以這兩個角度在立柱上要體現(xiàn)出來。從而在view中定義輪胎旋轉(zhuǎn)軸時選定。側(cè)傾角標(biāo)記點(diǎn):由于View中各種角度的定義參考坐標(biāo)系都是大地坐標(biāo)系,所以需要在車架中心平面左右兩側(cè)定義兩個點(diǎn),建議也用小圓球,用于在view中定義側(cè)傾角。
3562 4 2
灣灣梅 ??? 4年前
技術(shù)小貼士:如何將實(shí)驗(yàn)中測量的Spline數(shù)據(jù)應(yīng)用于RecurDyn? 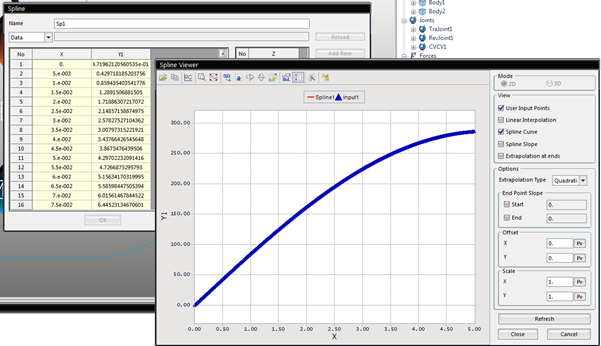
示例 : [鏈接]如何在仿真中使用實(shí)際現(xiàn)場中測量的Spline數(shù)據(jù)。 Spline數(shù)據(jù)不可以直接應(yīng)用于建模要素的詳細(xì)參數(shù)的情況下,Spline使用定義好的表達(dá)式。 在本Technical Tip中,與上面的第2項(xiàng)一致,將看一下如何使用表達(dá)式將實(shí)驗(yàn)中測量的Spline數(shù)據(jù)應(yīng)用到RecurDyn的建模要素(連接副,力等)中。
2505 2
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
20條/頁 
 45
45 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
