



六軸機(jī)械臂(帶抓手)運(yùn)動(dòng)學(xué)分析+軌跡規(guī)劃 
RRP.plotopt = {'workspace',[-10,10,-10,10,-10,10],'tilesize',10}; %設(shè)置模型空間大小和地磚大小 robot.teach; %畫出模型并進(jìn)行調(diào)控 robot.display(); %顯示建立的機(jī)器人的DH參數(shù) % robot.plot([0 0 0 0 0])%輸入一定參數(shù)后機(jī)器人圖形 %利用五次多項(xiàng)式軌跡規(guī)劃
5208 1
余俊煒 ??? 2年前
基于精準(zhǔn)碰撞檢測算法的機(jī)械臂避障軌跡規(guī)劃 
為保證機(jī)械臂運(yùn)動(dòng)加速度平滑、避免產(chǎn)生沖擊和震動(dòng),現(xiàn)在應(yīng)用最多的五多次項(xiàng)式插值法對機(jī)械臂進(jìn)行軌跡規(guī)劃,但是五次多項(xiàng)式插值規(guī)劃出來的角度、角速度、角加速度是唯一的,當(dāng)規(guī)劃出來的路徑上存在障礙物,由于唯一性,不能做到避障的要求。故本文采用六次多項(xiàng)式插值法進(jìn)行軌跡規(guī)劃,增加一個(gè)六次項(xiàng)系數(shù)C,通過改變系數(shù)C來調(diào)整軌跡,從而達(dá)到避障的目的。
3492 6 3
機(jī)械設(shè)計(jì)師 ??? 4年前
六自由度機(jī)械臂五次多項(xiàng)式軌跡規(guī)劃(Fivejtraj_Function自編寫函數(shù)) 
40,-30,-30,30,-15,20; 0,15,0,10,20,50; -40,30,30,-20,30,30];Velocity=[0,0,0,0,0,0;40,40,20,30,20,10;0,0,0,0,0,0];Accle=[0,0,0,0,0,0;0,0,0,0,0,0;0,0,0,0,0,0];[m,n]=size(Theta);% 五次多項(xiàng)式軌跡規(guī)劃
2602
余俊煒 ??? 3年前
機(jī)械臂B樣條插補(bǔ)軌跡規(guī)劃 
ylabel(string,'Interpreter','tex','FontSize',10); % 創(chuàng)建 xlabel xlabel('t(s)','Interpreter','tex','FontSize',10);endsaveas(figure2,figure2.Name,'svg')源文件見付費(fèi)內(nèi)容:(圖片如下)matlab 正逆運(yùn)動(dòng)學(xué)分析與軌跡規(guī)劃服務(wù)
2121
余俊煒 ??? 3年前
六軸機(jī)械臂搬運(yùn)仿真(機(jī)器人工具箱) 
,q2,50);%利用五次多項(xiàng)式函數(shù)軌跡規(guī)劃hold onrobot.plot(qt1, 'trail','-b')qt=robot.fkine(qt1)T11=transl(qt);plot3(T11(:,1),T11(:,2),T11(:,3) ,'-b');%輸出末端軌跡其他運(yùn)動(dòng)過程代碼見付費(fèi)內(nèi)容3、仿真運(yùn)動(dòng)視頻如下:
4143
余俊煒 ??? 2年前
多個(gè)六軸機(jī)械臂聯(lián)合作業(yè)搬運(yùn)仿真(機(jī)器人工具箱) 
1、建立三個(gè)六軸機(jī)械臂、工作平臺(tái)與貨物% theta d a alpha sigmaL1=Link([0 0 0 pi/2 0 ]);%連桿1參數(shù)L2=Link([0 -0.1455 0.4375 0 0 ]);L2.
3694
余俊煒 ??? 2年前
基于ADAMS的點(diǎn)按手法運(yùn)動(dòng)仿真 
2.2 點(diǎn)按法的運(yùn)動(dòng)軌跡規(guī)劃通過咨詢按摩專家,總結(jié)出了按法的運(yùn)動(dòng)特點(diǎn),機(jī)械臂末端的運(yùn)動(dòng)應(yīng)分為以下步驟:(1)首先,機(jī)械臂末端由初始位置以一定的速度到達(dá)離按摩部位s的正上方200 mm的地方。(2)從按摩部位正上方以一定速度讓機(jī)械臂末端與人體皮膚剛剛接觸,速度的變化過程:0—加速—恒速—減速—0,與人體接觸時(shí),速度正好為0。
3006 2
擺渡人張 ??? 2年前
基于粒子群優(yōu)化算法的六自由度機(jī)械臂三維空間避障規(guī)劃 
[2]馬宇豪.六自由度機(jī)械臂避障軌跡規(guī)劃及控制算法研究[D].中國科學(xué)院大學(xué)[2024-06-08]. 圖1 六自由度機(jī)械臂三維空間避障規(guī)劃示意圖 基于粒子群優(yōu)化算法的三維避障路徑規(guī)劃1.1 路徑規(guī)劃問題描述路徑規(guī)劃是指在已知環(huán)境信息的情況下,確定從起始點(diǎn)到目標(biāo)點(diǎn)的最優(yōu)路徑,并且該路徑不能與環(huán)境中的障礙物相交。
2409
320科技工作室 ??? 1年前
為什么說AR可視化讓機(jī)械臂實(shí)驗(yàn)更高效? 
與硬性的關(guān)節(jié)機(jī)械臂相比,柔性機(jī)械臂更難操作,尤其是用手動(dòng)來塑形可能會(huì)產(chǎn)生誤差。通常,培訓(xùn)柔性機(jī)械臂的時(shí)候需要先手動(dòng)將它塑造成任務(wù)所需的形狀,而在沒有指導(dǎo)的情況下,實(shí)驗(yàn)員很難將機(jī)器人配置成準(zhǔn)確的形狀。科研人員表示:多自由度機(jī)器人在設(shè)計(jì)、軌跡規(guī)劃和方向控制等方面都存在難度,而這也是許多圍繞機(jī)器人設(shè)計(jì)的實(shí)驗(yàn)中普遍面臨的問題。
3903 2 1
機(jī)械設(shè)計(jì)師 ??? 4年前
圓弧插值算法(有代碼) 
,機(jī)械臂進(jìn)行動(dòng)作執(zhí)行呈圓弧形軌跡運(yùn)動(dòng)。
2474
余俊煒 ??? 2年前
RecurDyn經(jīng)典案例:象鼻機(jī)器人機(jī)械臂的優(yōu)化設(shè)計(jì) 
象鼻機(jī)器人是一種模仿象鼻行為的具有無限自由度的機(jī)械手臂,目前正在研發(fā)中。這種機(jī)械臂機(jī)器人是由一組圓盤,通過中心連接到一個(gè)柔性軸上,由一組穿過圓盤的電纜控制。電纜的末端直接連接到電機(jī)上。手臂具有連續(xù)運(yùn)動(dòng),可針對特定的應(yīng)用場景進(jìn)行定制,例如,探查危險(xiǎn)區(qū)域。為了優(yōu)化這種柔性機(jī)械臂的設(shè)計(jì),需要研究幾個(gè)參數(shù):纜繩張力、纜繩末端隨時(shí)間變化的力、驅(qū)動(dòng)機(jī)構(gòu)所需的力、機(jī)器人的工作體積。
3366
杭州擬創(chuàng)(RecurDyn原廠) ??? 4年前
基于模仿學(xué)習(xí)和強(qiáng)化學(xué)習(xí)的機(jī)械臂運(yùn)動(dòng)技能獲取 
運(yùn)動(dòng)規(guī)劃軟件實(shí)現(xiàn)高層動(dòng)作規(guī)劃。將 RGB-D 圖像作為示教平臺(tái),在圖像中與一個(gè)物體交互并選擇一個(gè)高階動(dòng)作,引導(dǎo)機(jī)械臂在實(shí)際工作空間操作對應(yīng)的物體,多步的交互組成了一項(xiàng)運(yùn)動(dòng)技能的示教軌跡。 圖1 RGB-D圖像交互示教 然后,開展了從示教中學(xué)習(xí)技能的研究。
3348
機(jī)械設(shè)計(jì)師 ??? 4年前
增強(qiáng)現(xiàn)實(shí)場景下基于穩(wěn)態(tài)視覺誘發(fā)電位的機(jī)械臂控制系統(tǒng) 
機(jī)械臂的驅(qū)動(dòng)程序和運(yùn)動(dòng)控制程序均部署在ROS上。在ROS中,除了機(jī)械臂原有的節(jié)點(diǎn)外,還包括AR-BCI系統(tǒng)發(fā)布的節(jié)點(diǎn),用于向機(jī)械臂發(fā)送控制命令及接收機(jī)械臂狀態(tài)信息。 機(jī)械臂的路徑規(guī)劃采用笛卡兒空間軌跡規(guī)劃方法,在輸入機(jī)械臂的始末端位置、姿態(tài)及沿途經(jīng)過的路徑點(diǎn)位姿變化后,系統(tǒng)自動(dòng)規(guī)劃機(jī)械臂的行動(dòng)路徑。
2575 1
機(jī)械設(shè)計(jì)師 ??? 4年前
《基于 ABAQUS 的大跨距桁架不同截面模態(tài)分析和結(jié)構(gòu)優(yōu)化》 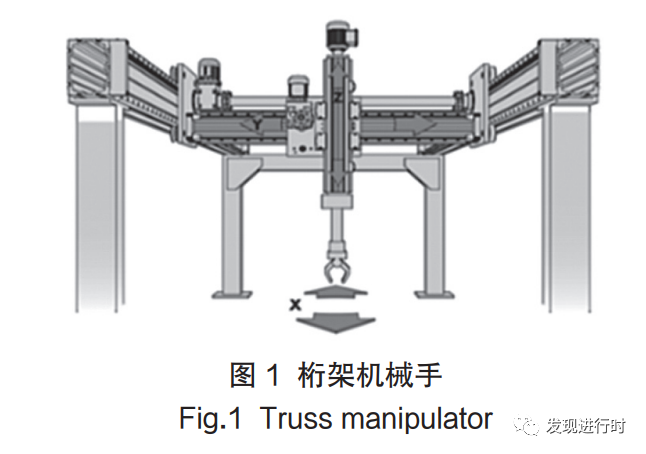
基于粒子群優(yōu)化算法的五自由 度機(jī)械臂軌跡規(guī)劃 [J]. 機(jī)械設(shè)計(jì)與研究 , 2020, 36(01):107- 110. [12] 權(quán)占群 , 張樹禮 . 桁架機(jī)械手及在柔性加工自動(dòng)線上的應(yīng)用 [J]. 金屬加工 ( 冷加工 ), 2014(12) :23-25. [13] 馮友強(qiáng) . 板材上下料桁架機(jī)械手的開發(fā)與研究 [J]. 裝備制造 技術(shù) ,2019(09):112-118.
3165 2
CAEer吳皓 ??? 2年前
六軸可視化機(jī)械臂仿真(三維模型導(dǎo)入matlab) 
0 , 'alpha', -pi/2 ,'offset',pi/2);L(5) = Link( 'd', -0.1023 , 'a' , 0 , 'alpha',pi/2,'offset',pi);L(6) = Link( 'd', -0.25281 , 'a' , 0 , 'alpha',0,'offset',0);robot = SerialLink(L,'name','六軸機(jī)械臂
2279
余俊煒 ??? 2年前
六軸碼垛機(jī)器人admas正逆運(yùn)動(dòng)學(xué)仿真 
基座自由度、大臂擺動(dòng)自由度、小臂擺動(dòng)自由度、腕部Y軸擺動(dòng)自由度、腕部Z軸擺動(dòng)自由度及其腕部末端X軸旋轉(zhuǎn)自由度 其導(dǎo)入過程為: (1) 機(jī)器人三維模型總體有6個(gè)部分。打開機(jī)器人的SolidWork三維模型,依次另存為6個(gè)“Parasolid(x_t)”類型的文件。
2373
余俊煒 ??? 3年前
matlab與Adams的機(jī)械臂運(yùn)動(dòng)學(xué)驗(yàn)證 
1、Adams的運(yùn)動(dòng)學(xué)建模 在Adams中建立機(jī)械臂模型,如圖1所示,箭頭為機(jī)械臂末端執(zhí)行器的初始位置。
2971 1 1
木火柴 ??? 4年前
基于DeltaD打印機(jī)的剛?cè)狁詈线\(yùn)動(dòng)學(xué)分析 
[4]張俊,池長城,湯騰飛,等.五自由度混聯(lián)3D打印機(jī)設(shè)計(jì)與運(yùn)動(dòng)學(xué)分析[J].中南大學(xué)學(xué)報(bào)(自然科學(xué)版),2020,51(10):2822G2833.[5]曾達(dá)幸,張星,樊明洲,等.3GCUR解耦并聯(lián)3D打印機(jī)結(jié)構(gòu)優(yōu)化與動(dòng)力學(xué)分析[J].中國機(jī)械工程,2017,28(12):1413G1420.
4395 3
擺渡人張 ??? 2年前
慧通測控車載觸摸屏測試系統(tǒng),賦能車載觸摸屏品質(zhì) 
通過觸碰電容式觸摸屏的有效區(qū)域計(jì)算屏上網(wǎng)格線的分布位置,機(jī)械臂按照網(wǎng)格線或?qū)蔷€的軌跡逐條劃線,機(jī)械臂從左上角開始,從左到右,從上 到下依次劃線,XY 軸的速度為 1-150mm/s 可設(shè)。在劃單條線段過程中沒有接受到坐標(biāo)值,則認(rèn)為此線段為無效線段。手指劃完當(dāng)前線段后抬起的距離可設(shè)。
380
德基西瓜 ??? 4天前
基于機(jī)械系統(tǒng)動(dòng)力學(xué)自動(dòng)分析的多噴頭3D打印機(jī)運(yùn)動(dòng)學(xué)研究 
后有學(xué)者鑒于串聯(lián)所產(chǎn)生的一系列問題申請了基于Delta并聯(lián)機(jī)械結(jié)構(gòu)的3D打印機(jī)專利,提高打印精度與質(zhì)量,但由于結(jié)構(gòu)的局限性,打印回轉(zhuǎn)體類型程序復(fù)雜,控制較為困難[6]。機(jī)械臂3D打印技術(shù)可以多個(gè)自由度快速打印,可見該技術(shù)對編程要求極高[7,8,9,10]。
4500 4
擺渡人張 ??? 2年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
