



傾轉(zhuǎn)旋翼機(jī)復(fù)合材料機(jī)翼動(dòng)特性仿真分析 
傾轉(zhuǎn)旋翼機(jī)可在直升機(jī)模式、固定翼飛機(jī)模式和兩者之間過(guò)渡模式飛行,集直升機(jī)和固定翼飛機(jī)飛行特點(diǎn)與一身。相比傳統(tǒng)直升機(jī),傾轉(zhuǎn)旋翼機(jī)的飛行速度大幅提高,飛行包線更大,應(yīng)用范圍更加廣闊;與固定翼飛機(jī)相比,傾轉(zhuǎn)旋翼機(jī)大大降低了對(duì)場(chǎng)地的要求,提高了空間靈活性。
4829 7 1
我愛(ài)飛機(jī) ??? 2年前
風(fēng)干擾下傾轉(zhuǎn)旋翼飛行器直升機(jī)模態(tài)預(yù)設(shè)性能跟蹤控制 
與普通直升機(jī)不同的是,傾轉(zhuǎn)旋翼機(jī)為雙旋翼飛行器,沒(méi)有尾槳,而且需要考慮機(jī)翼機(jī)身等機(jī)體部分的氣動(dòng)力。直升機(jī)模態(tài)下,傾轉(zhuǎn)旋翼機(jī)的控制方式也與普通直升機(jī)有很大差異,其控制量為旋翼總距、總距差動(dòng)、旋翼橫向周期變距和縱向周期變距。
2695 1
我愛(ài)飛機(jī) ??? 2年前
傾轉(zhuǎn)旋翼無(wú)人機(jī)流場(chǎng)仿真,基于fluent重疊網(wǎng)格制作(含全部幾何模型、網(wǎng)格及計(jì)算文件和全程錄屏教程) 
珠海航展上,國(guó)內(nèi)展示了一種傾轉(zhuǎn)旋翼設(shè)計(jì)的無(wú)人攻擊機(jī)。傾轉(zhuǎn)旋翼的最大優(yōu)勢(shì),就是既具備直升機(jī)的垂直起降能力,又在航程和速度特性上,高度接近螺旋槳固定翼飛機(jī)。
傾轉(zhuǎn)旋翼機(jī)的缺陷也很明顯,結(jié)構(gòu)要更復(fù)雜都是最容易解決的問(wèn)題;其氣動(dòng)特性、特別是動(dòng)力裝置傾轉(zhuǎn)過(guò)程中的氣動(dòng)特性變化,現(xiàn)在還有大量的問(wèn)題沒(méi)有研究清楚。
3775 10 4
laplacianFoam ??? 3年前
基于SCDM+FM+Fluent的bellbat傾轉(zhuǎn)旋翼機(jī)旋翼傾轉(zhuǎn)過(guò)程氣動(dòng)仿真 

采用了貝爾的傾轉(zhuǎn)旋翼戰(zhàn)斗機(jī)概念模型,進(jìn)行傾轉(zhuǎn)旋翼的氣動(dòng)仿真。傾轉(zhuǎn)旋翼飛行器旋翼轉(zhuǎn)速600RPM,主旋翼從水平狀態(tài)往垂直狀態(tài)進(jìn)行傾轉(zhuǎn),傾轉(zhuǎn)速度15rpm,計(jì)算旋翼傾轉(zhuǎn)過(guò)程的瞬態(tài)過(guò)程。可以獲取傾轉(zhuǎn)過(guò)程中的旋翼拉力,下洗速度、機(jī)身壓力分布等各種數(shù)據(jù)。
886 5
無(wú)人機(jī)工坊 ??? 1年前
一種無(wú)人直升機(jī)旋翼槳葉設(shè)計(jì)與動(dòng)力學(xué)試驗(yàn) 
目前無(wú)人機(jī)主要執(zhí)行的是航拍、監(jiān)測(cè)環(huán)境、農(nóng)業(yè)植保等任務(wù)載荷,且大部分無(wú)人機(jī)以多旋翼為主。多旋翼無(wú)人機(jī)是靠螺旋槳轉(zhuǎn)速的變化,來(lái)調(diào)整力和力矩的,實(shí)現(xiàn)多旋翼無(wú)人機(jī)的飛行運(yùn)動(dòng)控制。對(duì)多旋翼無(wú)人機(jī)的槳葉來(lái)說(shuō), 一方面,槳葉尺寸越大,越難以迅速改變其速度。也正是因?yàn)槿绱耍?em>無(wú)人直升機(jī)主要是靠改變槳距而不是速度來(lái)改變升力。另一方面,在大載重下,槳葉的剛性需要進(jìn)一步提高。
6763 1 2
aero-engine ??? 2年前
多旋翼無(wú)人機(jī)的振動(dòng)實(shí)驗(yàn)和仿真分析 
摘 要:對(duì)多旋翼無(wú)人機(jī)的結(jié)構(gòu)振動(dòng)問(wèn)題進(jìn)行了設(shè)計(jì)研究。在小型多旋翼無(wú)人機(jī)上,激光振動(dòng)儀驗(yàn)證了加速度傳感器測(cè)量振動(dòng)的可靠性,發(fā)現(xiàn)圓形碳纖維臂具有較強(qiáng)的阻尼能力,z軸方向振動(dòng)最強(qiáng)。實(shí)驗(yàn)表明,多旋翼無(wú)人機(jī)臂的主要振動(dòng)為300 Hz以下的低頻振動(dòng),主要產(chǎn)生扭轉(zhuǎn)和彎曲模態(tài)。該研究還提出了一種抑制多旋翼無(wú)人機(jī)振動(dòng)的改進(jìn)策略。
5850 7 2
無(wú)人機(jī)圈 ??? 2年前
通過(guò) CFD 仿真延長(zhǎng)四旋翼無(wú)人機(jī)的飛行時(shí)間和范圍 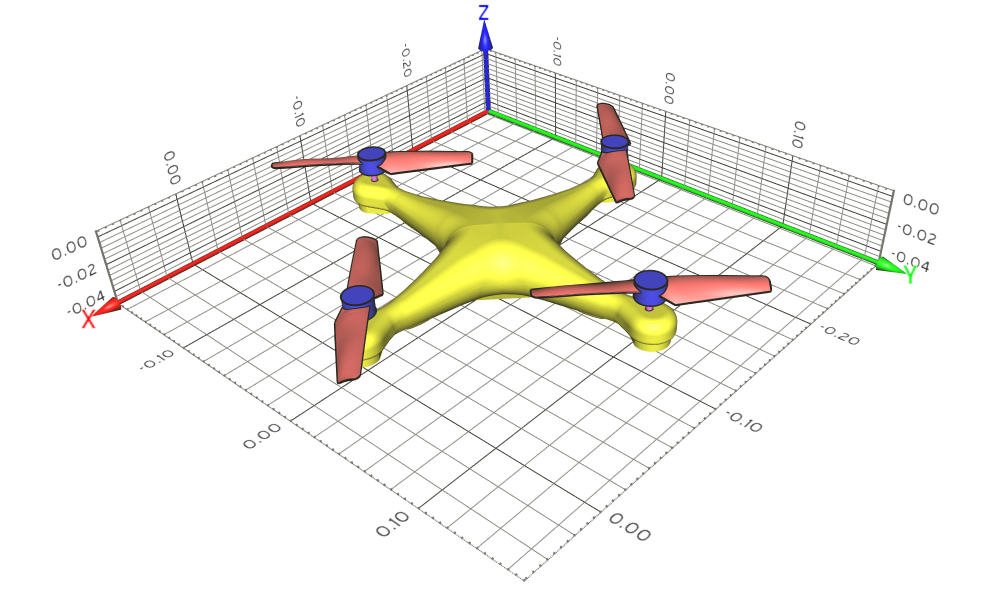
2023 年 3 月 1 日? 5 分鐘閱讀 空中無(wú)人機(jī)主要有兩大類:能夠垂直起降 (VTOL) 的旋翼機(jī)和固定翼飛行器。與固定翼系統(tǒng)相比,旋翼無(wú)人機(jī)具有重要優(yōu)勢(shì),因?yàn)樗鼈兛梢詰彝#ū3趾愣ǜ叨龋┎⑶彝ǔ8子诳刂坪筒僮鳌H欢?em>旋翼也有先天的缺點(diǎn),最重要的是飛行時(shí)間和航程有限。即使是現(xiàn)代和創(chuàng)新的電動(dòng)無(wú)人機(jī)也有大約 20-30 分鐘的有限飛行時(shí)間,具體取決于飛行條件。
3159 4 2
Cadence CFD學(xué)習(xí) ??? 3年前
CFD專欄丨四旋翼無(wú)人機(jī)空氣動(dòng)力學(xué)仿真 
在前處理HyperMesh中簡(jiǎn)單的處理一下CAD, 去掉小特征,封閉間隙,生成STL表面; 四旋翼無(wú)人機(jī)STL模型 四旋翼無(wú)人機(jī)參數(shù) 2.
4481 5 3
ALTAIR ??? 2年前
航天國(guó)器將攜新型縱列式雙旋翼無(wú)人直升機(jī)亮相珠海航展 
GQ-320型無(wú)人直升機(jī)在海上飛行 GQ-580型無(wú)人直升機(jī)在索降 據(jù)悉,這種縱列式雙旋翼無(wú)人直升機(jī)平臺(tái),具有優(yōu)異的氣動(dòng)性能,穩(wěn)定性強(qiáng),抗風(fēng)能力突出,可以作為空中無(wú)人運(yùn)輸平臺(tái),采用機(jī)降、索降、拋投等方式為部隊(duì)提供常規(guī)、臨機(jī)狀態(tài)下的物資補(bǔ)給,滿足高原哨所、邊防海島等特殊環(huán)境下的后勤運(yùn)輸補(bǔ)給需求;也可以掛載超短波等無(wú)線寬帶通信中繼設(shè)備,為作戰(zhàn)單位提供通信中繼,實(shí)現(xiàn)山區(qū)環(huán)境或應(yīng)急狀態(tài)下的遠(yuǎn)距離多節(jié)點(diǎn)的通信要求
3411
無(wú)人機(jī)圈 ??? 3年前
一臺(tái)高度靈活的四旋翼無(wú)人機(jī)
蘇黎世大學(xué)一個(gè)研究小組開(kāi)發(fā)了一種高度靈活的四旋翼無(wú)人機(jī),能夠避開(kāi)障礙物并進(jìn)行軌跡跟蹤。新設(shè)計(jì)包括添加機(jī)載視覺(jué)傳感器、飛行控制監(jiān)控系統(tǒng)和一系列其他組件,旨在提高無(wú)人機(jī)實(shí)時(shí)接收和處理飛行信息的能力。他們還添加了一個(gè)高級(jí)AI模塊NVIDIA Jetson TX2,該模塊能夠快速執(zhí)行支持無(wú)人機(jī)硬件的復(fù)雜任務(wù),以實(shí)現(xiàn)平穩(wěn)靈活的飛行。
1957
無(wú)人機(jī)10086 ??? 3年前
一種變軸螺旋槳水空跨域無(wú)人航行器設(shè)計(jì)和控制技術(shù) 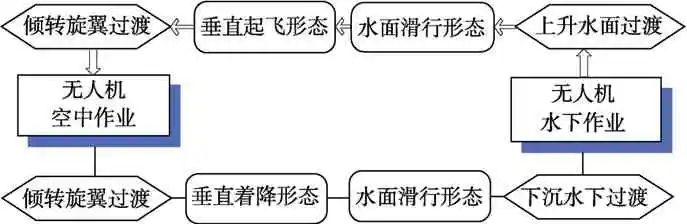
圖13 帶有干擾補(bǔ)償?shù)母┭鼋穷A(yù)測(cè)控制流程Fig.13 Pitch angle prediction control process with interference compensation 4.3 可傾轉(zhuǎn)螺旋槳無(wú)人機(jī)過(guò)渡狀態(tài)的高度控制 可傾轉(zhuǎn)旋翼無(wú)人機(jī)在整個(gè)傾轉(zhuǎn)過(guò)渡過(guò)程中,旋翼為主維持升力狀態(tài)飛行時(shí),旋翼傾轉(zhuǎn)角度小但前飛速度小;而機(jī)翼為主維持升力狀態(tài)飛行時(shí),旋翼傾轉(zhuǎn)角度大,在前飛速度不足的情況下則機(jī)翼升力
6361 1 2
aero-engine ??? 2年前
SimSolid使用體驗(yàn)分享-四旋翼無(wú)人機(jī)的結(jié)構(gòu)仿真分析 
SimSolid試用體驗(yàn)分享-四旋翼無(wú)人機(jī)的結(jié)構(gòu)仿真分析適用人群:結(jié)構(gòu)設(shè)計(jì)工程師、CAE工程師SimSolid試用體驗(yàn)分享-四旋翼無(wú)人機(jī)的結(jié)構(gòu)仿真分析(免費(fèi))【已結(jié)束】 直播時(shí)間:2020-08-27 19:30Altair SimSolid是專為設(shè)計(jì)工程師開(kāi)發(fā)的結(jié)構(gòu)分析軟件且極具創(chuàng)新性。
2399 1 1
技術(shù)鄰直播 ??? 5年前
基于icem+fluent多旋翼無(wú)人機(jī)氣動(dòng)仿真 
本課程從模型處理,到icem劃分網(wǎng)格,再到fluent設(shè)置,結(jié)果后處理,詳細(xì)介紹多旋翼無(wú)人機(jī)的氣動(dòng)仿真過(guò)程,可以準(zhǔn)確的得到指定轉(zhuǎn)速,指定速度情況下,多旋翼無(wú)人機(jī)的流場(chǎng)情況以及氣動(dòng)力情況!包括拉力,扭矩,功率,力效等,以及速度、壓力云圖,下洗流場(chǎng)情況等。(本視頻采用的是瞬態(tài)滑移網(wǎng)格的形式進(jìn)行的計(jì)算)(/無(wú)人機(jī)仿真/無(wú)人機(jī)流場(chǎng)仿真/飛行器仿真/多軸仿真)有疑問(wèn)和建議隨時(shí)交流,共同進(jìn)步!
5528 184
湍流實(shí)驗(yàn)室 ??? 8年前
基于SCDM+Fluent Meshing+ Fluent的多旋翼無(wú)人機(jī)螺旋槳單向流固耦合的仿真 
本視頻從實(shí)際工程應(yīng)用出發(fā),在Workbench環(huán)境中進(jìn)行無(wú)人機(jī)螺旋槳的單向流固耦合分析(FSI)。主要包括兩個(gè)部分CFD氣動(dòng)計(jì)算模塊和CAE結(jié)構(gòu)分析模塊;CFD氣動(dòng)計(jì)算模塊包括以下內(nèi)容:從模型處理,到Fluent Meshing網(wǎng)格劃分,再到fluent設(shè)置和結(jié)果后處理,詳細(xì)介紹無(wú)人機(jī)螺旋槳/旋翼的仿真過(guò)程(MRF方法),可以準(zhǔn)確的得到指定轉(zhuǎn)速下,無(wú)人機(jī)螺旋槳的拉力、扭矩、下洗流場(chǎng)等。
1005
無(wú)人機(jī)工坊 ??? 1年前
共軸剛性旋翼構(gòu)型高速直升機(jī)發(fā)展研究 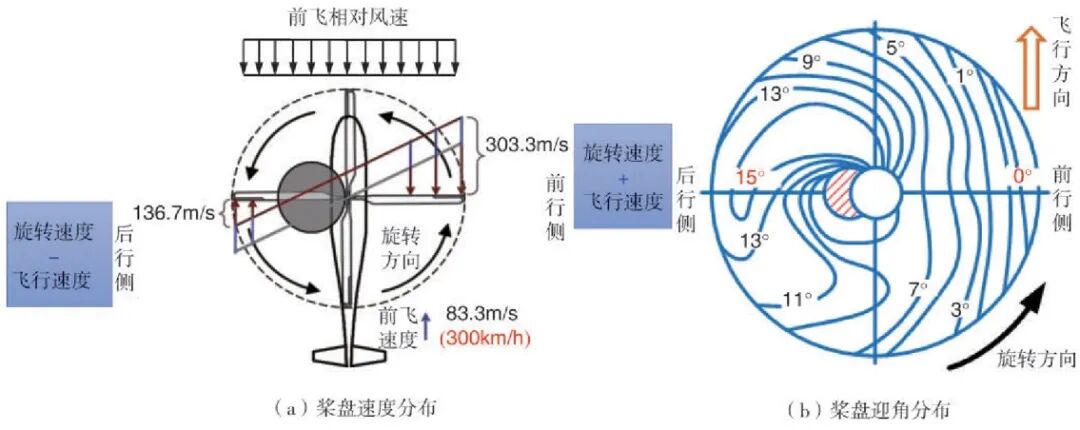
為實(shí)現(xiàn)高速化目標(biāo),高速直升機(jī)必須采用非常規(guī)構(gòu)型,包括共軸、傾轉(zhuǎn)等,以規(guī)避目前常規(guī)直升機(jī)存在的旋翼限制;采用具備變轉(zhuǎn)速調(diào)節(jié)能力的先進(jìn)渦軸發(fā)動(dòng)機(jī)與傳動(dòng)系統(tǒng),保證高速飛行所需的功率輸出,以及持續(xù)飛行時(shí)的低油耗;采用高效旋翼系統(tǒng)及全復(fù)材機(jī)體結(jié)構(gòu),以保證高氣動(dòng)效率與重量效率。
4607 1
我愛(ài)飛機(jī) ??? 2年前
雙旋翼飛行器如何在旋翼故障時(shí)避免墜毀 
一種微小型傾轉(zhuǎn)雙旋翼飛行器的被動(dòng)容錯(cuò)控制[D] 北京航空航天大學(xué)本科學(xué)位論文,北京。”
2341
無(wú)人機(jī)10086 ??? 3年前
基于Workbench-Fluent的四旋翼無(wú)人機(jī)流場(chǎng)分析,免費(fèi)無(wú)聲音,操作細(xì)致,附件練習(xí)(需購(gòu)買) 
本視頻為基于Workbench-Fluent的四旋翼無(wú)人機(jī)流場(chǎng)分析,免費(fèi)無(wú)聲音,操作細(xì)致,附件練習(xí)(需購(gòu)買),主要涉及到外流場(chǎng)的設(shè)置,網(wǎng)格劃分,簡(jiǎn)單的動(dòng)網(wǎng)格設(shè)置,CFD-POST后處理,歡迎購(gòu)買討論學(xué)習(xí)。
369 5
兵荒馬亂 ??? 5年前
Wingcopter利用Ansys技術(shù)擴(kuò)大無(wú)人機(jī)運(yùn)送醫(yī)療物資的規(guī)模 
Wingcopter依靠Ansys的多物理場(chǎng)和安全分析解決方案來(lái)驗(yàn)證無(wú)人機(jī)設(shè)計(jì)。其無(wú)人機(jī)配備冗余電池系統(tǒng)和8個(gè)電機(jī),其中4個(gè)電機(jī)采用傾轉(zhuǎn)旋翼技術(shù),以增強(qiáng)向巡航狀態(tài)的過(guò)渡的性能。仿真技術(shù)可幫助Wingcopter評(píng)估無(wú)人機(jī)在各種條件下(包括強(qiáng)風(fēng)、暴雨、不同海拔等)的性能。
2200
Ansys中國(guó) ??? 8月前
低空經(jīng)濟(jì) | eVTOL噪聲測(cè)試標(biāo)準(zhǔn)與案例分享 
國(guó)際標(biāo)準(zhǔn)ISO 5305:2024:這一標(biāo)準(zhǔn)規(guī)定了記錄最大起飛質(zhì)量(MTOM)小于150kg的旋翼動(dòng)力無(wú)人駕駛飛機(jī)系統(tǒng)(UAS)周圍幾個(gè)位置瞬時(shí)聲壓時(shí)間歷程的方法。適用于電力驅(qū)動(dòng)或燃料驅(qū)動(dòng)的UAS,不適用于傾轉(zhuǎn)旋翼或傾轉(zhuǎn)翼無(wú)人機(jī)。該文件也可用于測(cè)量來(lái)自具有多個(gè)旋翼或單個(gè)旋翼UAS的聲壓。
4084
HBK聲學(xué)與振動(dòng) ??? 1年前
案例分享|復(fù)雜仿真應(yīng)用定制——UAVSim無(wú)人機(jī)仿真APP 
無(wú)人機(jī)四旋翼側(cè)網(wǎng)格生成效果圖2. LBM求解器對(duì)旋翼機(jī)體的數(shù)值仿真目標(biāo):實(shí)現(xiàn)不同工況下旋翼的高保真數(shù)值模擬,以提升無(wú)人機(jī)整體的飛行效率、機(jī)動(dòng)性、穩(wěn)定性和安全性。
1489
神工坊(高性能仿真) ??? 4月前
20條/頁(yè) 
 10
10 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
