



請(qǐng)教一下如何在LS-Prepost中正確定義鉸接(Joint)?
一個(gè)小球傾斜一定角度,在重力和初速度(INITIAL_VELOCITY_NODE)下撞向另一個(gè)小球,鉸接方式用了CONSTRAINED_JOINT_REVOLUTE。(我測試了JOINT_SPHERICAL,鉸接也會(huì)脫離)在計(jì)算后,動(dòng)畫里兩個(gè)小球都是在重力下直接往下掉的,似乎鉸接并沒有定義上。鉸接節(jié)點(diǎn)的坐標(biāo)沒問題,是重合的(COINCIDE),否則會(huì)報(bào)錯(cuò)。施加了邊界條件的邊梁就沒有往下掉。
1864 1 2
EvanHNU ??? 4年前
ABAQUS建模中如何模擬鋼桁架與柱鉸接連接、彈性連接、滑動(dòng)連接
剛接、鉸接、彈性連接、滑動(dòng)連接這四種連接方式如何模擬?
2383 1 2
用戶_38989 ??? 2年前
【ABAQUS算例】如何用Hypermesh建立ABAQUS中的桿單元 
這期呢,主要講解一下怎么在Hypermesh建立一根桿,然后導(dǎo)入ABAQUS中計(jì)算。之前在做一個(gè)骨頭韌帶仿真時(shí),需要在已有的骨頭基礎(chǔ)上,加上韌帶,之前沒有做過桿單元,倒騰了很久。所以,這里就做一個(gè)簡單的算例,做一個(gè)ABAQUS中桿單元的前處理。希望給需要的人帶來幫助。
6172 7 2
Hs小畢 ??? 4年前
鉸接坦克:冷戰(zhàn)時(shí)期瑞典UDES坦克裝甲車研制項(xiàng)目全解析 
時(shí)間進(jìn)展到了上世紀(jì)70年代中期,之后蠻聲海外的Bv206全地形裝甲車正在研制中,于是瑞典人將UDES-19項(xiàng)目的頂置火炮和Bv206裝甲車的鉸接結(jié)構(gòu)底盤相結(jié)合,終于開始了夢想中的鉸接坦克的研制。所謂鉸接坦克就是將前后車體一刀兩斷,但卻藕斷絲連,用鉸接機(jī)構(gòu)連在一起,使其能夠在各種地形上行駛。
6610
飛天豬主 ??? 3年前
hypermesh中實(shí)體建立、刪除圓角(無聲,免費(fèi)分享) 

hypermesh中幾何模塊更多是用作幾何切分、清理,有時(shí)候根據(jù)需要也可以快速建立一些簡單幾何模型,不必到三維設(shè)計(jì)軟件中建模。其中創(chuàng)建實(shí)體圓角是常見的,hypermesh也有這個(gè)功能,這里視頻簡單演示一下。未發(fā)現(xiàn)直接創(chuàng)建倒角功能,這個(gè)暫時(shí)只能創(chuàng)建倒角實(shí)體,再進(jìn)行布爾合并;或者切出倒角來。hypermesh中刪除實(shí)體圓角、倒角也方便,defeature功能基本上一步搞定。
2948
力學(xué)星空 ??? 6年前
某行走機(jī)構(gòu)多體動(dòng)力學(xué)與結(jié)構(gòu)強(qiáng)度聯(lián)合仿真分析 
通過MotionView建立該產(chǎn)品行走機(jī)構(gòu)的多體動(dòng)力學(xué)模型,通過多體動(dòng)力學(xué)仿真分析,獲得了關(guān)鍵部件的工作載荷歷程,確定了部件的最大載荷。通過在HyperMesh中建立關(guān)鍵部件的有限元模型,加載MotionView輸出的載荷信息,通過OptiStruct計(jì)算分析,找到了結(jié)構(gòu)的主要受力位置,分析結(jié)果與結(jié)構(gòu)的實(shí)際破壞完全吻合。
3175
CAE仿真學(xué)習(xí)菌 ??? 2年前

在hypermesh中,建立安全帶模型
除了一維二維安全帶、預(yù)緊器、卷收器、傳感器、滑環(huán)。還需要?jiǎng)e的參數(shù)嗎?
2251 1 2
Ov ??? 2年前
【JY】ETABS纖維鉸的使用 
ETABS中框架單元的非線性行為可以通過塑性鉸和纖維鉸兩種方式實(shí)現(xiàn),塑性鉸是通過建立力與變形關(guān)系,從整體上描述截面的非線性行為,而纖維鉸則是通過將截面離散為有限根纖維,并假定每根纖維處于單軸應(yīng)力狀態(tài),在平截面假定的基礎(chǔ)上依據(jù)纖維材料的本構(gòu)關(guān)系確定截面的非線性行為,這在模擬軸力(特別是變軸力)與雙向彎矩耦合作用下的非線性行為非常有效。 1.
3533 6 6
建源之光 - 減隔震 ??? 3年前
基于hypermesh與ansys apdl的聯(lián)合仿真——如何建立運(yùn)動(dòng)副 
最后考慮到hypermesh中相關(guān)轉(zhuǎn)動(dòng)只能繞著x軸或者z軸去轉(zhuǎn)動(dòng),所以建立一個(gè)坐標(biāo)系很重要,如下在analysis中的systems中同理apdl中坐標(biāo)系的建立需要從11開始,要進(jìn)行重新的編號(hào)tool-renumber移動(dòng)副到這里就介紹完畢了,下面是移動(dòng)副的介紹,本質(zhì)上的一樣的所以講的稍微粗糙些,如下導(dǎo)入我們?cè)趕olidworks中建立的裝配體模型,并且進(jìn)行網(wǎng)格劃分操作
3821 28 9
仿真學(xué)習(xí)cae ??? 1年前
鋼結(jié)構(gòu)工程中外露式柱腳常見做法及有關(guān)規(guī)定 
在此基礎(chǔ)上才能建立與其結(jié)構(gòu)現(xiàn)狀一致的結(jié)構(gòu)計(jì)算模型,才能保證結(jié)構(gòu)計(jì)算模型的合理性、計(jì)算結(jié)果的準(zhǔn)確性。 相關(guān)文獻(xiàn)指出,一般的外露式柱腳,從力學(xué)的角度看,作為半剛性考慮更加合適,故實(shí)際工程中外露式柱腳大多設(shè)計(jì)成鉸接柱腳。
6427 2
學(xué)土木的搬磚人 ??? 2年前
直升機(jī)能飛起來,全靠這個(gè)復(fù)雜機(jī)構(gòu)! 
以上4種型式的旋翼是典型的分類,實(shí)用中還有許多中間型式,如法國"海豚"直升機(jī)的星型柔性旋翼,就是一種介乎鉸接式與無鉸式之間的型式,即所謂有彈性約束的鉸接式旋翼。免責(zé)聲明:本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。如涉及版權(quán)問題,請(qǐng)與機(jī)械學(xué)霸聯(lián)系,我們將第一時(shí)間協(xié)商版權(quán)問題或刪除內(nèi)容。
2901
機(jī)械學(xué)霸 ??? 3年前
喵星人嘔心瀝血總結(jié)ABAQUS易出錯(cuò)的邊界條件 
解決方案(1)可在支座部件的轉(zhuǎn)動(dòng)線上切一條線,并對(duì)線設(shè)置鉸豎向約束。對(duì)轉(zhuǎn)動(dòng)線設(shè)置固定鉸接邊界條件。由于此處繞線轉(zhuǎn)動(dòng)時(shí)并不影響U2位移,因此實(shí)現(xiàn)鉸接邊界。(2)可在部件底部耦合一參考點(diǎn),并對(duì)參考點(diǎn)設(shè)置鉸約束。如圖所示,在底面中心位移耦合一參考點(diǎn)(快速生成面中心參考點(diǎn)插件可見視頻操作,公眾號(hào)回復(fù)“參考點(diǎn)插件”可免費(fèi)獲取哦~)。并對(duì)參考點(diǎn)設(shè)置固定鉸接邊界條件。
1152
會(huì)CAE的喵星人 ??? 6月前
基于Abaqus汽車球鉸防塵罩有限元分析 
在汽車工程實(shí)踐過程中,球鉸應(yīng)用在汽車底盤部件,如控制臂、轉(zhuǎn)向拉桿、穩(wěn)定桿連桿等部件上。橡膠防塵罩是球鉸重要的零部件。防塵罩失效會(huì)導(dǎo)致球鉸失效。因此在設(shè)計(jì)防塵罩的過程中,需要確定防塵罩的輪廓變化。今天和大家聊一聊球鉸防塵罩的仿真分析。本文參照了《研究與開發(fā)》雜志的《汽車球鉸防塵罩的有限元分析》有興趣的也可以下載研究一下。
3924 9 10
兔叔 ??? 4年前
基于Hypermesh前處理與Fluent、Optistruct求解器的流固耦合分析(二)流固耦合 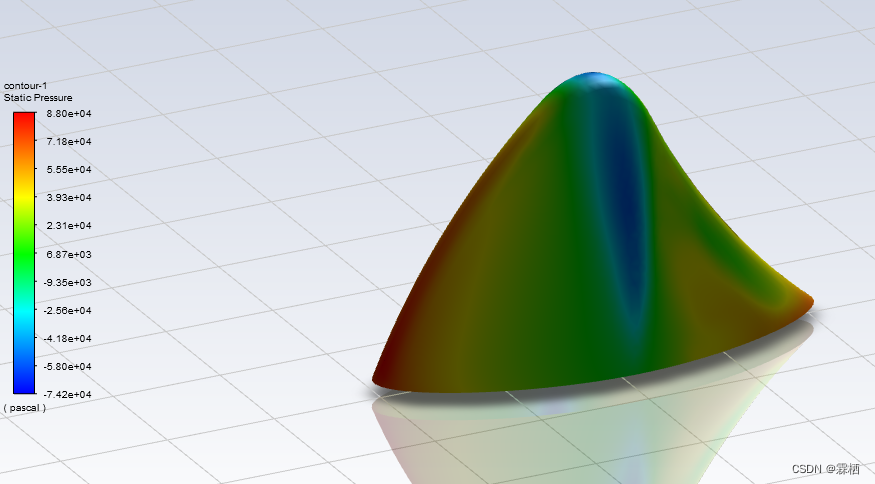
編輯 接下來就是設(shè)置約束并建立載荷步 ? 編輯 提交計(jì)算 計(jì)算結(jié)果如下: ? 編輯四、總結(jié) 本次分析完成了用Hypermesh為CFD建立流體域并劃分網(wǎng)格,并導(dǎo)入至fluent進(jìn)行流場計(jì)算,然后將fluent里面的壓強(qiáng)結(jié)果映射至OPtistruct的求解模型上,并完成計(jì)算。
2860
霖棲 ??? 1年前
喵星人嘔心瀝血總結(jié)ABAQUS易出錯(cuò)的邊界條件 
</strong></p><p>如圖所示,對(duì)轉(zhuǎn)動(dòng)線設(shè)置固定鉸接邊界條件。由于此處繞線轉(zhuǎn)動(dòng)時(shí)并不影響U2位移,因此實(shí)現(xiàn)鉸接邊界。
3083 27 14
會(huì)CAE的喵星人 ??? 9月前
HyperMesh+LS-DYNA__球鉸連接關(guān)系_連接變形體和變形體 
本期視頻利用汽車上一個(gè)零部件有限元模型,講解在HyperMesh中,LS-DYNA工作環(huán)境下,如何在兩個(gè)變形體之間之間創(chuàng)建球鉸連接關(guān)系。球鉸連接關(guān)系特點(diǎn):限制被連接體的3個(gè)平動(dòng)自由度,不限制被連接體的3個(gè)轉(zhuǎn)動(dòng)自由度。
47
Sahariver ??? 5年前
用Abaqus復(fù)現(xiàn)最強(qiáng)大腦的腦王決賽項(xiàng)目《傅立葉殘影》 
裝配體如圖所示: 這六個(gè)球體可以用來代表五根指針的頭部和末梢,但模擬中最重要的部分其實(shí)是如何表示指針。如果再建立五個(gè)梁單元那任務(wù)量會(huì)是十分繁瑣無趣的,本文使用的方法是通過鉸接連接器演示球體的轉(zhuǎn)動(dòng)。 鉸接的意思就是對(duì)于一個(gè)物體的三個(gè)平動(dòng)自由度和三個(gè)轉(zhuǎn)動(dòng)自由度,我們約束其中的五個(gè),只允許一個(gè)轉(zhuǎn)動(dòng)自由度發(fā)生變化。
2262
涼魚pro max ??? 2年前
基于LS-DYNA的整車側(cè)面碰撞分析流程與規(guī)范 
9.2 分析模型建立建立有限元模型,以下事項(xiàng)需要特別注意:a) 分析模型的網(wǎng)格質(zhì)量應(yīng)符合求解器的要求;b) 模型中各模塊的命名、模塊劃分及零件的命名必須規(guī)范;c) 材料參數(shù)由材料模型庫中取得,各個(gè)零件的材料按照明細(xì)表給其賦予材料特性;d) 定義各個(gè)零件屬性時(shí),應(yīng)根據(jù)設(shè)計(jì)方提供的厚度清單逐一設(shè)定各個(gè)零件的材料厚度;e) 模型的焊接、鉸接、膠粘按照實(shí)際焊點(diǎn)位置分布
3353 5 2
wkd1106 ??? 6年前
鋼板梁橋面板現(xiàn)澆施工移動(dòng)托架設(shè)計(jì)與分析 
圖1 鋼板組合梁現(xiàn)澆托架結(jié)構(gòu)(cm) 2 托架系統(tǒng)整體受力分析2.1 模型及荷載參數(shù)采用Midas Civil有限元分析軟件建立托架系統(tǒng)計(jì)算模型。各桿件的尺寸均按照方案中的型號(hào)進(jìn)行建模。在立柱上下方按照鉸接考慮。
4643 5
魯班施工 ??? 2年前
20條/頁 
 55
55 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
