



三自由度機械臂運動學分析+仿真 
robot.teach; %畫出模型并進行調控 robot.display(); %顯示建立的機器人的DH參數 運行上述程序,即可得到機器人模型如圖 3-3 圖 33機器臂模型 運動空間分析 依據機器人三個自由度的運動范圍,采用三自由度機器人模型進行計算
3991
余俊煒 ??? 2年前
1/4懸架二自由度運動學方程——通過狀態方程的方法在Simulink里面構建模型 

本節課主要是在前兩節課的基礎上,通過狀態方程的方法,在simulink里面構建1/4懸架二自由度運動學方程,然后對懸架的幅頻特性進行分析。以車身加速度對路面位移響應的幅頻特性為例,進行闡述,保姆級教學。。。附帶simulink模型以及matlab求解幅頻特性的方法,歡迎大家一起學習探討并進行指正。
543 2
東邪不邪 ??? 3年前
五自由度機械臂運動學分析(三轉動+兩移動自由度) 
驗證了正運動學方程的正確性。需要完整代碼看付費內容或者加扣扣2386317960
3035
余俊煒 ??? 3年前
【JY】基于Matlab的(單)多自由度動力學代碼分享 
寫在前文多自由度分析是現代工程和科學研究中不可或缺的一部分。它涉及到對復雜系統的動力學行為進行精確描述和預測。分享下多自由度的源代碼,僅供學習。
4295 12 2
建源之光 - 減隔震 ??? 2年前
Zemax案例 | 基于Zemax相機多自由度主動對準技術研究 
(3)傳感器對準:多視場物理信息驅動的五自由度精調透鏡組固定后,傳感器對準本質是尋找多視場成像質量綜合理想的位姿平面。研究利用多視場離焦曲線的空間分布信息,建立傳感器傾斜與視場專屬焦移補償的等效模型,通過BFGS算法快速求解理想傾斜與偏心量,實現傳感器dx、dy、dz、tx、ty五自由度精調,完成全系統對準。
978
摩爾芯創 ??? 15天前
振動力學多自由度系統問題選題?
具體要求: (1)所研究結構為實際工程或生產生活中的真實結構,分析時可對結構進行一定程度簡化,但不應過分簡化,不能作為單自由度系統,若為多自由度系統,其自由度數不少于5. (2)研究內容參考《振動力學》課程內容展開,可以包含但不限干,不同研究方法的對比,對結構動力響應的參數影響研究,針對結構動力響應的結構優化設計,結構動力特性影響機理分析等。
3893 1 1
阿薩姆拌啤酒?? ??? 2年前
starccm船舶六自由度運動?
求教starccm能對這種帶吊物的船進行六自由度仿真嗎?
3792 2 2
用戶_46685 ??? 1年前
采用matlab編程狀態方程的方式描述二自由度1/4懸架幅頻響應特性 
本節課采用matlab編寫狀態方法的方式,描述二自由度1/4懸架幅頻響應特性,區別去前三節課中:matlab牛二定律法、simulink搭積木法、simulink狀態方程法。歡迎大家探討學習,如有不足,懇請指正。共同學習。視頻中的源程序我放到課程附件里面了。大家可以直接下載使用
350 2
東邪不邪 ??? 3年前
千萬自由度大規模線性方程組并行求解庫PETSc的介紹 
同時,當ksptype為preonly時,表明方程組不采用迭代求解,只采用預處理方法直接求解方程組,因此此時實際上就實現了線性方程組的直接法求解。
3442 1
寒江雪_123 ??? 3年前
abaqus 報錯 方程約束中獨立自由度過度?
abaqus 報錯 A group of connected equations has more than 1000 independent degrees of freedom. Abaqus/Explicit cannot efficiently solve this system. It is suggested that the user consider replacing the connected
2868 11
FEM在路上 ??? 1年前
多學科統一的多體動力學建模方法 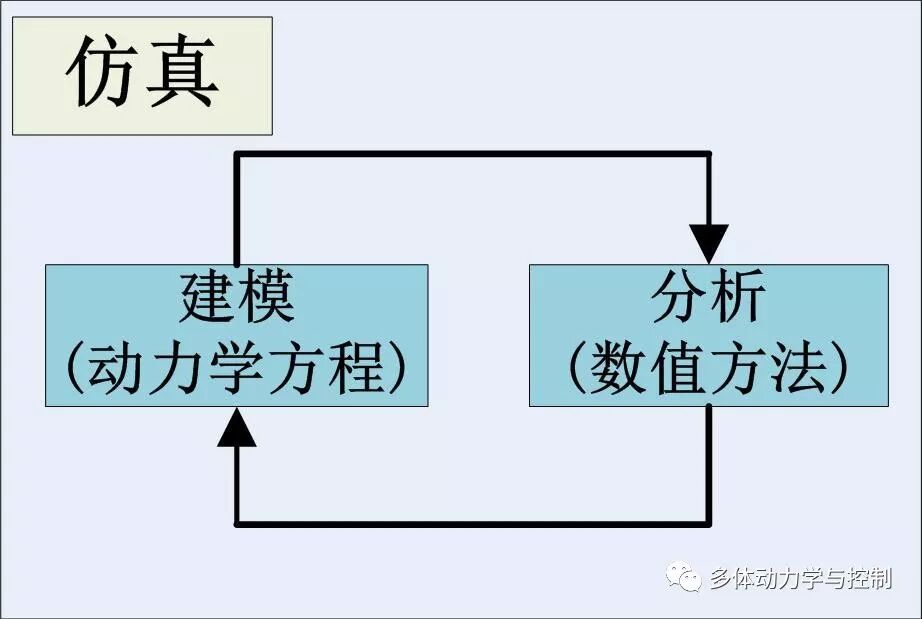
1.廣義坐標與自由度 能夠描述動態系統的坐標可以很多,在一個系統中能夠唯一確定系統位姿或狀態的坐標稱為廣義坐標,同時一般描述系統的廣義坐標的個數等于系統的自由度。 在多學科耦合系統中,首先應該確定系統的廣義坐標和自由度。
3299 5 3
CAE仿真學習菌 ??? 2年前
報錯:1個節點具有同時指定速度/位移/加速度/基本運動等約束的自由度?
求大神給分析一下,這個錯誤怎么解決
2336 1 2
亦久亦舊_4410 ??? 3年前
基于DeltaD打印機的剛柔耦合運動學分析 
,因此對三維模型進行了適當簡化,結構主要由靜平臺?轉臂?擺臂以及動平臺構成,其中靜平臺主要安裝轉臂的驅動電機以驅動轉臂完成復雜的打印動作;轉臂及擺臂主要輔助動平臺能夠多自由度完成相應的打印動作,并對動平臺起到主要支撐作用以滿足其工作強度要求.動平臺主要作為打印噴嘴的安裝平臺,Delta打印機結構如圖1所示.2 打印機位姿求解為便于模型研究及運動學方程建立,將上述模型簡化為幾何關系表達式
4397 3
擺渡人張 ??? 2年前
STAR-CCM+系泊問題:漂浮式海洋牧場養殖裝置系泊系統設計 
通過所得輻射勢和繞射勢,求解浮體的波浪力,進而建立浮體的頻域運動方程,見式(3)。 式(3)中:m為浮體質量;λa為額外阻尼系數;μij為附加質量;λij為輻射阻尼;K為靜水回復系數;Ka為額外剛度系數;xi為浮體的位移;F為波浪激勵力。 之后將浮體的頻域運動方程轉換為時域運動方程。當浮體進行六自由度微幅運動時,可以把運動看成一系列脈沖運動。
4348 1
仿真客 ??? 3年前
基于ADAMS的點按手法運動仿真 
ADAMS采用世界上廣泛流行的多剛體系統動力學理論中的拉格朗日方程方法,選取系統內每個剛體質心在慣性參考系中的3個直角坐標和確定剛性方位的3個歐拉角作為笛卡爾廣義坐標,用帶乘子的拉格朗日方程處理具有多余坐標的完整約束系統或非完整約束系統,導出以笛卡爾廣義坐標為變量的運動學方程。
3010 2
擺渡人張 ??? 2年前
模擬流體中的粒子運動時,選擇合適的公式以提升計算效率 
如果具有不同粒徑的分布,請基于最小粒徑進行此估算,因為模型中最小慣性粒子決定了運動方程的數值剛度。 如果要在比速度響應時間大得多的時間范圍內預測粒子運動(比如說幾千倍甚至更多倍),則應該考慮慣性是否實際上在粒子運動中起著重要作用。如果不是,則可以從列表中選擇牛頓型,忽略慣性項(從 5.6 版本開始可用)。 如果仍要考慮慣性,則可以使用牛頓型或牛頓型,一階公式。
3659 7
學時習 ??? 2年前
CAE黑話:自由度(DOF)/多點約束(MPC)/剛體位移 
1?? 自由度 ( Degree of Freedom , DOF ) 節點能運動的獨立方向。3D結構中,一個節點通常有6個自由度:3個平動 (UX, UY, UZ) 和 3個轉動 (ROTX, ROTY, ROTZ)。約束 (Boundary Condition) 的本質就是限制某些節點的DOF。
1451
技術鄰-大奎 ??? 2月前
六自由度機械臂五次多項式軌跡規劃(Fivejtraj_Function自編寫函數) 
,定義插補次數n,根據驅動器支持的最大插補次數設定Time=[0,0,0,0,0,0;5,5,5,5,5,5;10,10,10,10,10,10];StopTime=Time(3,1);FixedStep=0.2;SimpleNum=0:FixedStep:StopTime;Cunt=length(SimpleNum);for i=1:n %% 求每個關節角的五次多項式插補軌跡點
2603
余俊煒 ??? 3年前
自學無網格粒子Particleworks流體飛濺和自由液面仿真分析 
并且,MPS的半隱式時間積分方法,可以采用較長的時間步長求解,針對流體運動時間較長的過程可以大大縮短計算時間。MPS在各行業工程應用中展現了獨特的優勢。 MPS求解過程 MPS方法概要 1、控制方程 MPS計算的控制方程是:質量守恒方程(連續性方程)、動量守恒方程(Navier-Stokes方程)兩大方程。
3500 1
安世亞太 ??? 3年前
ANSYS AQWA系泊分析:漂浮式海洋牧場養殖裝置系泊系統設計
通過所得輻射勢和繞射勢,求解浮體的波浪力,進而建立浮體的頻域運動方程,見式(3)。 式(3)中:m為浮體質量;λa為額外阻尼系數;μij為附加質量;λij為輻射阻尼;K為靜水回復系數;Ka為額外剛度系數;xi為浮體的位移;F為波浪激勵力。 之后將浮體的頻域運動方程轉換為時域運動方程。當浮體進行六自由度微幅運動時,可以把運動看成一系列脈沖運動。
3469 1 1
海上追風 ??? 3年前
20條/頁 
 153
153 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
