



Ansys Workbench中如何查看(A點)相對(X坐標系)的位置 
最近突然遇到一個有意思的問題,一時不知道如何操作,想著Ansys 應該比較容易實現,但是用了很長時間才找到一種方案(lll¬ω¬)。不知道大家是如何操作的。已知:X坐標系和Y坐標系,和A點 相對Y坐標系的位置。查看A點相對X坐標系的位置,A點可以不是幾何點或網格節點。
2546 6
cae_lizh ??? 10月前
abaqus中怎么對同一參考點在不同分析步邊界條件使用不同局部坐標系?
1、abaqus中對邊界條件的設置是只允許使用一個坐標系么?2、設置第一個分析步使用局部坐標系1,在第二步取消激活,第二步時使用局部坐標系23、以上設置方法只是針對同一個剛體的參考點
2676 3
小程序用戶_HNT7beM6 ??? 1年前
Ansys Zemax | 如何圍繞空間中的任何點旋轉任何元素 
這將使我們沿著軸向前移動到透鏡的中心,也就是我們想要的旋轉軸點的位置。 第7行進行傾斜和偏心。我們使用了一個5度的傾斜 X(參見圖15)。 在第7行中應用傾斜和偏心后,應用厚度-1.5 mm。這將我們從樞軸點移動回鏡頭前面(即使鏡頭現在是傾斜和偏心)。 第8和9行在新的傾斜/偏心坐標系中構建鏡頭。第9行之后,我們就到了鏡頭的后面。 第10行使用一個坐標返回到表面7。
2635
宇熠科技 ??? 8月前
三自由度機械臂運動學分析+仿真 
正運動學分析 根據D-H表規定得到如下變換矩陣為: 由此可得機器人相鄰兩關節位姿分別為: 所以,坐標系{4}相對于基坐標系的變換矩陣為: 相對于基坐標系的旋轉矩陣 位置矢量 根據DH參數求解變換矩陣的函數trans
3989
余俊煒 ??? 2年前
abaqus如何創建移動或者旋轉的局部坐標系?
我需要在abaqus現有的坐標系旋轉30度生成一個新的坐標系來施加邊界條件,我怎么生成與現有坐標系成30度夾角的坐標系呢?有哪位大佬能教一下我嗎
3455 2 2
abaqus學習壓 ??? 2年前
質量管理 | 功能尺寸和局部坐標系在eMMA軟件輔助車身裝配中的應用 
局部坐標系設定“正確的測量基準”01 為何需要局部坐標系?在全局坐標系下,一個零件可能因夾具偏差或焊接變形發生整體位移或旋轉。這種“整體偏差”可能并不影響其與相鄰零件的裝配。如果在全局坐標系下評價,所有測點都會顯示超差,從而掩蓋了零件自身真正的制造誤差和關鍵的裝配問題。
2161
海克斯康設計與仿真 ??? 6月前
基于ADAMS的點按手法運動仿真 
在基架與地之間添加固定副,在關節1、關節2、關節3、關節4、關節5及關節6添加旋轉副(revolute joint),如圖2所示。在添加運動約束的時候,會產生I-Marker和J-Marker兩個坐標系[1,2],調整這兩個坐標系的方向,使其符合D-H參數[3]。表1所示為所建模型的D-H參數表。
3010 2
擺渡人張 ??? 2年前
UG修改幾何體顏色,基準平面,從坐標系進入草圖平面等筆記 
創建草圖時,進入草圖界面,選擇坐標系中,黃色的面,再點確認,則會在這個ZX軸向面上創建草圖。分別在三個坐標軸向上創建一個圓,如下圖。這三個圓處于不同的三個三維面。基準坐標系:在菜單,插入,基準/點,基準坐標系,打開如下圖的基準坐標系圖標及菜單;基準坐標系:中間的小球可以調整角度.把它調整到需要的角度,用于繪制圖形時參考.
3120
張偉一 ??? 3年前
Ansys Zemax|如何使用坐標返回功能恢復原坐標系 
在下圖中,S2和S3處產生了y偏移,這僅僅是因為在S1的坐標系中傳播了一段非零的Z距離(S1繞X軸傾斜了20度)。 圖 2:鏡頭編輯器與三維布局圖。如果要定義S3在物空間坐標系中的位置,可以采取以下幾種方法之一:1、手動計算出由于沿傾斜坐標系傳播z距離而產生的y偏移量,對應地偏心表面。
1213
宇熠科技 ??? 2月前
坐標轉換與參數計算介紹 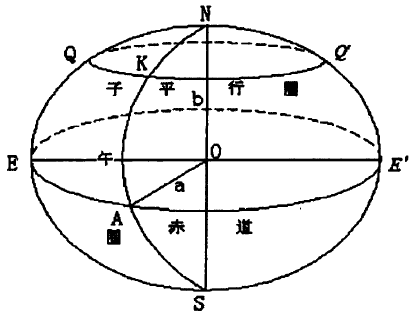
如圖1所示,O為橢球中心,NS是旋轉軸,a是長半軸,b是短半軸。子午面是通過橢球旋轉軸的平面,其與橢球面的交線叫做子午圈;平行圈是橢球面與垂直于旋轉軸的平面截得的圓,這其中經過橢球中心O的平行圈叫做赤道。2、常用坐標表現形式為了表示橢球面上點的位置,必須建立相應的坐標系,選用不同的坐標系,其坐標表現形式也不同。
2676 2
繪夢流光 ??? 3年前
Maxwell繪圖 坐標系簡介 
Ansys Maxwell 提供四種坐標系工繪圖使用:分別為全局坐標系、相對坐標系、表面坐標系、實體坐標系。
全局坐標系(Global Coordinate System(CS)):系統默認的坐標系,固定的,無法編輯刪除。
相對坐標系(Relative CS):用戶自定義坐標系,可以基于現有坐標系平移或者旋轉獲得。
4990 3 2
陳亞明 ??? 1年前
Abaqus疑難雜癥——局部坐標系的那些事兒 
其 含義 為: 創建節點集合ex,將這些節點的自由度轉換至柱坐標系下,為這些節點定義位移邊界條件,約束2方向(周向)上的位移。 其中TYPE=C表示局部坐標系的類型為柱坐標系,如果TYPE=R,則為局部直角坐標系,TYPE=S,則為球坐標系。 在大位移分析中,此局部坐標系的方向不會隨著材料的旋轉而旋轉。
7041 8 8
易公子 ??? 4年前
農業機械清選仿真-Fluent-RockyDEM單向耦合 
在Cell Zone的設置中輸入MRF旋轉域的轉軸原點、轉速、轉軸方向。其中轉軸原點可以設置為一端的中心。這個點的坐標可以提前通過spaceclaim中的測量功能點擊料滾的軸或者一端的中心點測量出來,然后記錄下這個點的坐標,輸入進axis origin一欄。 右上方入口設為-100Pa靜壓,左下方和右下方入口設為表壓為0的條件。
3128 9 5
臨淮散仙 ??? 3年前
晶體塑性有限元仿真入門(5)—歐拉角與晶體取向 
如圖7所示,空間中任意取向的晶格,通過將全局坐標系依次采用三組歐拉角進行旋轉后,都可以與晶體坐標系重合。第一次旋轉是圍繞Z軸旋轉的,第二次旋轉是圍繞新的X軸,第三次旋轉角度圍繞新的Z軸。與三維空間中點的位置信息包含X、Y、Z三個自由度一樣,三維空間中晶格的取向信息也包含三個自由度,記三個歐拉角為?1、Φ、?2。
8218 27 10
iCPFEM ??? 2年前
軸流通風機葉片模態仿真及其對氣動噪聲的影響
所以使輪轂圓柱裝配面的有限元節點 X,Z方向的自由度得到約束(在全局柱 面坐標系中)。有限單元的節點都有一個坐標系與載荷方向對應,在通常情況下節 點坐標系與全局迪卡爾坐標系對應,必須首先用NROTAT命令轉換節點坐標到柱 面坐標系中,然后再在節點上加載位移約束。
2428 1
雙螺桿泵 ??? 2年前
生產制造 | 產品加工-EDGECAM創建多方向坐標系 
wx_fmt=gif&from=appmsg"></p><p>海克斯康工業軟件EDGECAM使用“WCS(工作坐標系)”功能來創建多方向坐標系。在EDGECAM中通過“工作平面”選項,可以靈活地拖動、旋轉坐標系,使它符合你想要的方向。
2807
海克斯康設計與仿真 ??? 1年前
ArcGIS中影像糾偏配準和轉坐標系 
源坐標系(Input Coordinate System):自動讀取源文件的坐標信息。此例中源坐標系為WGS84地理坐標系。輸出柵格(Output Raster Dataset):選擇輸出影像圖片的文件名,需在后面加文件后綴“.tif”。輸出坐標系(Output Coordinate System):要轉換到的目標坐標系。此例中需轉換到北京54高斯投影3度帶子午線117E。
2705
地質GIS帝國 ??? 3年前
Ansys Zemax | 如何模擬掃描鏡 
,這是因為添加了鏡面后,光線在原坐標系中會沿著與反射光線相反的方向傳播 在鏡面前插入一個坐標間斷面,并設置X傾斜 (Tilt About X) 為-45° 在鏡面后插入一個坐標間斷面,并設置X傾斜為-45°需要注意的是坐標間斷面沒有光焦度,因此不會偏折光線:它們只是根據前一個表面的坐標系設置相應的傾斜和偏心,以此來定義一個新的坐標系。
1474
宇熠科技 ??? 3月前
六軸機械臂(帶抓手)運動學分析+軌跡規劃 
正運動學分析 根據D-H表規定得到如下變換矩陣為: 由此可得機器人相鄰兩關節位姿分別為: 所以,坐標系{4}相對于基坐標系的變換矩陣為: 相對于基坐標系的旋轉矩陣 位置矢量 根據DH參數求解變換矩陣的函數
5211 1
余俊煒 ??? 2年前
基于ANSYS軟件的1+6鋼絲繩網格劃分策略及仿真 
不可貫入性可以表示為:式中:tx[Math Processing Error]表示A面上任意指定點P在t時刻的坐標;tx[Math Processing Error]表示t時刻B面上最接近P點的Q點的坐標;tnB表示單位法向向量。庫倫摩擦模型可以表示為:式中:μ為摩擦系數;|tFAT|和|tFAN|分別為切向和法向接觸力的值。
5819 3 5
Infiniteelements ??? 2年前
20條/頁 
 70
70 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
