



recurdyn履帶車輛指導(dǎo)教學(xué)(不限于履帶) 
本人專注recurdyn動(dòng)力學(xué)仿真5年,具有豐富的仿真經(jīng)驗(yàn),針對履帶建模仿真資料有以下5部分:1、通用履帶底盤建模,包括紙質(zhì)版資料和視頻,2、擺臂履帶底盤建模,包括教學(xué)視頻和源文件,3、輪-履復(fù)合式履帶建模,4、recurdyn+EDEM聯(lián)合仿真。包括視頻和源文件,5、Recurdyn+Matlab聯(lián)合仿真
2304
Recurdyn 13060190875 ??? 4年前
RecurDyn成功案例:多履帶式城市偵察機(jī)器人虛擬驗(yàn)證 
”用于復(fù)雜動(dòng)作的數(shù)學(xué)建模▎工具包? RecurDyn/Professional? RecurDyn//TrackHM▎工程問題? 需要提前驗(yàn)證新概念機(jī)器人能否完成任務(wù)? 由許多履帶鏈節(jié)組成的復(fù)雜機(jī)器人模型? 樓梯和履帶板之間的復(fù)雜接觸條件? 需要模擬原地轉(zhuǎn)彎和攀爬等復(fù)雜動(dòng)作?
4322
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
Recurdyn履帶問題 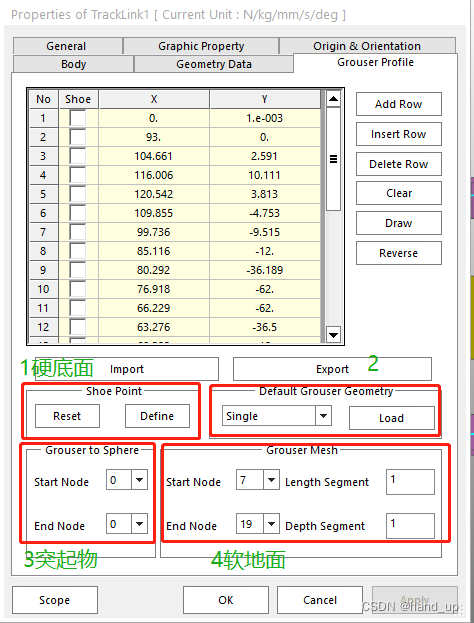
4.問題:履帶路面性質(zhì)修改建立其他特征路面方法一:選擇在建立路面的時(shí)候,就將路面曲線Curve繪制成自己需要的形狀,然后再變成Road方法二:在安裝路徑下找到文件:RecurDyn V * R * \ Toolkits \ MF tire \ Road data Files,然后將其拷貝到存儲(chǔ)模型的同一個(gè)文件夾中,接下來單擊:Ground>Road Data GRImport
4225 3
CAE仿真學(xué)習(xí)菌 ??? 2年前
RecurDyn成功案例:小型履帶式裝載機(jī)通過仿真分析來控制成本 
獨(dú)具子系統(tǒng)概念,有助于用戶高效的建立和管理模型? Force/Torque 的顯示功能,支持用戶直觀的檢查作用在每個(gè)零件上的荷載▎工具包? RecurDyn/Professional? RecurDyn/TrackLM▎工程問題? 開發(fā)具有足夠疲勞耐久性的小型履帶式裝載機(jī)? 行駛時(shí)需要考慮履帶的變形
2401 2 2
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
《基于 RecurDyn 的四履帶足機(jī)器人運(yùn)動(dòng)學(xué)仿真》現(xiàn)已開放領(lǐng)取 
摘要: 應(yīng)用多體動(dòng)力學(xué)仿真分析軟件 RecurDyn 對四履帶足機(jī)器人進(jìn)行全三維建模及越障過程仿真,并分析了履帶機(jī)器人行走過 程 中 的 力 學(xué) 模 型,仿真 結(jié) 果 動(dòng) 態(tài),準(zhǔn)確的反映了四履帶足機(jī)器人行走機(jī)構(gòu)的越障過程,驗(yàn)證了四履帶足機(jī)器人行走機(jī)構(gòu)較之雙履帶結(jié)構(gòu)形式出色的越障能力,體現(xiàn) 了 RecurDyn 軟件在履帶機(jī)器人的動(dòng)力學(xué)仿真分析方面的有效性和優(yōu)越性 。1. 引言2.
2550
上海安世亞太 ??? 2年前
RecurDyn官方履帶專題培訓(xùn) 

為了提供更多人學(xué)習(xí)使用RecurDyn履帶工具包的機(jī)會(huì),特舉辦本次履帶專題培訓(xùn)。第一講 低速履帶建模與仿真分析第二講 低速履帶CAD實(shí)體替換教程第三講 履帶的MFBD仿真分析第四講 高速履帶建模與仿真分析第五講 RecurDyn × EDEM聯(lián)合仿真第六講 RecurDyn × AMEsim聯(lián)合仿真
346 8
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
RecurDyn建模常見問題:履帶建模 
文章來源:Recurdyn軟件
3086 4 2
CAE仿真學(xué)習(xí)菌 ??? 2年前
recurdyn履帶車輛動(dòng)力學(xué)分析 
recurdyn履帶車輛動(dòng)力學(xué)分析
1730
Recurdyn 13060190875 ??? 4年前
Recurdyn履帶車輛動(dòng)力學(xué)仿真 
Recurdyn履帶車輛動(dòng)力學(xué)仿真
1338 1
Recurdyn 13060190875 ??? 4年前
【8月19-21日 杭州】杭州擬創(chuàng)科技RecurDyn軟件培訓(xùn)班 
一、培訓(xùn)背景:履帶式行走裝置由于其具有接地面積大、附著性能好、爬坡能力強(qiáng)、轉(zhuǎn)彎半徑小等特點(diǎn),因此它的應(yīng)用范圍十分廣泛,而履帶車輛的穩(wěn)定性、履帶板的可靠性等研究是企業(yè)研發(fā)過程中必不可的重要環(huán)節(jié),傳統(tǒng)的仿真分析軟件不僅建模耗時(shí)耗力,仿真時(shí)長往往也不盡人意。 RecurDyn軟件中搭載了履帶專用的工具,包能幫助用戶快速進(jìn)行履帶建模與仿真分析。
2695 1
技術(shù)鄰公告 ??? 3年前
2023年6月培訓(xùn)報(bào)名 
Boolean操作; CAD替換案例演示; 高速履帶Track_HM工具包建模; 三種不同的履帶板:Single Pin、Double Pin、Inner Pin; 后處理:履帶各項(xiàng)輸出結(jié)果履帶模型報(bào)錯(cuò)案例展示; 履帶模型報(bào)錯(cuò)案例展示;
2258
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
履帶建模常見問題及解決方法-履帶穿透、脫軌、彈飛問題 
仿真時(shí)履帶會(huì)脫落,鏈輪的接觸搜索方式更改為full search 就會(huì)報(bào)錯(cuò)OUT OF RANGE (SINGLE FLANGE ROLLER),是什么原因呢?答案:如果初始狀態(tài)下履帶和鏈輪之間發(fā)生干涉,在低版本的RecurDyn可能可以仿真,但是會(huì)脫落,但是接觸更改為full search 就會(huì)報(bào)錯(cuò)。
2578
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecurDyn軟件培訓(xùn) (2022年度) 
軟件培訓(xùn)(基礎(chǔ)+中級(jí)+高級(jí)應(yīng)用:流固耦合) 專題培訓(xùn):履帶車輛仿真專題 專題培訓(xùn):變速箱潤滑仿真專題 RecurDyn軟件培訓(xùn)(基礎(chǔ)+中級(jí)+接觸專題)
2294
杭州擬創(chuàng)(RecurDyn原廠) ??? 4年前
RecrDyn履帶專用Track工具包 
RecurDyn履帶專用Track工具包適用人群:履帶機(jī)構(gòu)研究及從業(yè)人員,廣大動(dòng)力學(xué)仿真用戶、RecurDyn興趣愛好者RecurDyn履帶專用Track工具包,打破傳統(tǒng)建模方式,引領(lǐng)仿真新潮流(免費(fèi))【已結(jié)束】 直播時(shí)間:2022-08-03 19:30課程背景:近年來隨著來履帶車輛的發(fā)展,人們對其機(jī)動(dòng)性能的要求也越來越高,研究人員也越來越關(guān)注車輛的參數(shù)
4784 1 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
【RecurDyn在工程/農(nóng)業(yè)機(jī)械領(lǐng)域的應(yīng)用】直播補(bǔ)充 
答:需要在EDEM中設(shè)置wall的參數(shù),在Recurdyn中也要給皮帶設(shè)置真實(shí)的物理屬性。 履帶仿真問題 問:怎么把建立的剛性履帶合并到一起,柔性化以后添加接觸和約束,讓它能仿真成功?
3686 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 4年前
履帶建模常見問題及解決方法-接觸問題 
RecurDyn中如何修改履帶與地面的接觸參數(shù)?答案:進(jìn)入履帶子系統(tǒng)模式,從數(shù)據(jù)窗口最下端選擇Track(LM)—TrackAsembly,右鍵選擇Property,在Contact Parameter中設(shè)置6. 在仿真履帶在路面運(yùn)動(dòng)時(shí)出現(xiàn)這種報(bào)錯(cuò),該怎么解決啊?
2552
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
跟我一起來認(rèn)識(shí)RecurDyn 附RecurDyn柔性體技術(shù)介紹下載 
RecurDyn設(shè)計(jì)優(yōu)化RecurDyn的行業(yè)專用工具包模塊包括送紙機(jī)模塊,齒輪元件模塊,鏈條分析模塊,皮帶分析模塊,履帶分析模塊(高機(jī)動(dòng)性和低機(jī)動(dòng)性),輪胎模塊和發(fā)動(dòng)機(jī)開發(fā)設(shè)計(jì)模塊。它包含豐富的行業(yè)專用組件,參數(shù)化調(diào)節(jié)各部件的幾何形狀,方便用戶快速便捷地分析特殊復(fù)雜的任務(wù)。
3505 1
huanggu4797 ??? 3年前
2024年RecurDyn優(yōu)秀案例競賽作品分享:核探測機(jī)器人底盤設(shè)計(jì)與越障性能仿真驗(yàn)證 
二、建模過程 考慮到模型的簡化與求解方便,在建立機(jī)器人虛擬樣機(jī)模型時(shí)分為兩部分,首先在專業(yè)的三維建模軟件SolidWorks中建立其主要結(jié)構(gòu)并進(jìn)行簡化,然后在RecurDyn軟件中利用履帶模塊對履帶底盤進(jìn)行參數(shù)化建模,之后將建立好的車體等零部件導(dǎo)入到RecurDyn軟件中并施加相應(yīng)的驅(qū)動(dòng)與約束,最后進(jìn)行動(dòng)力學(xué)仿真分析。
2553
杭州擬創(chuàng)(RecurDyn原廠) ??? 1年前
履帶建模常見問題及解決方法-CAD替換問題 
自定義的履帶板如何在RecurDyn中進(jìn)行仿真?答案:可以使用CAD Link功能進(jìn)行替換;或者通過V2024新功能Linked Assembly工具進(jìn)行裝配使用。履帶CAD實(shí)體替換教學(xué)視頻RecurDyn V2024新功能Linked Assembly搶先看(上)!2.
2712
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecurDyn 新手入門指導(dǎo)
為聯(lián)合仿真控制模塊,例如與Amesim進(jìn)行液壓的聯(lián)合仿真; TSG為虛擬臺(tái)架試驗(yàn)?zāi)K;例如,將測得的車輪力或加速度轉(zhuǎn)為時(shí)間信號(hào)應(yīng)用于多體模型中,從而開展耐久性分析; Flexible為柔性體模塊,柔體又包含全柔體和模態(tài)柔體兩種; Post Analysis為后處理模塊,如疲勞分析; Toolkit為專業(yè)工具包模塊,例如帶、鏈、履帶等工具包
4246 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
