



基于SFE全參數(shù)化副車架多學(xué)科優(yōu)化設(shè)計(jì) 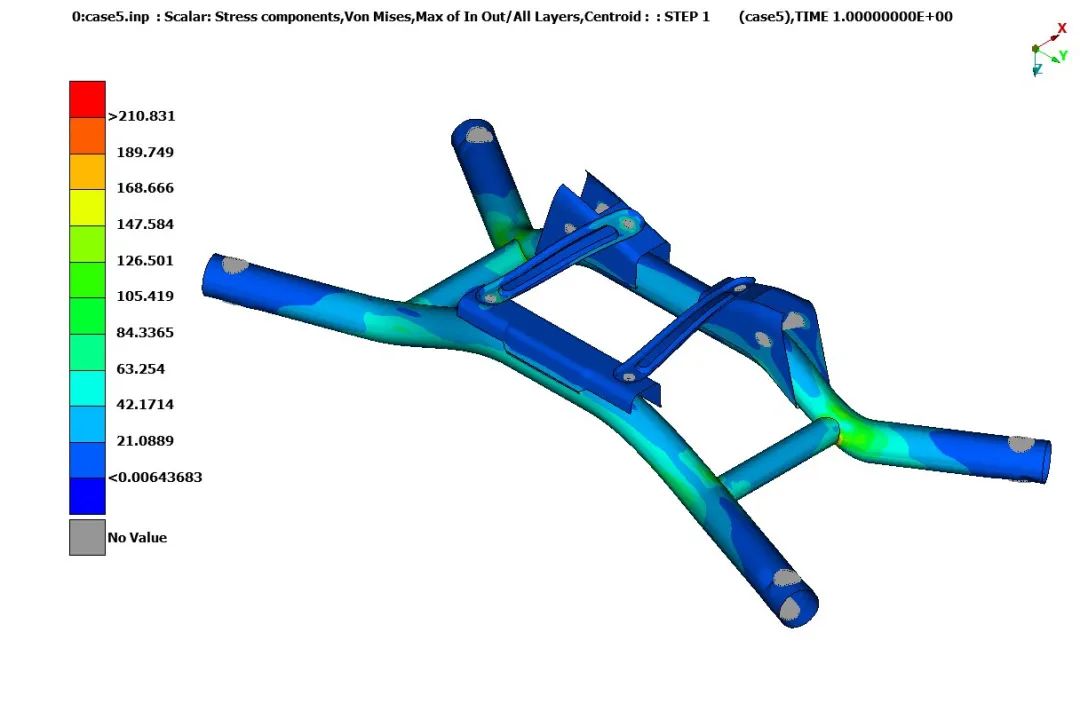
一、副車架的性能開(kāi)發(fā) 副車架可以承受發(fā)動(dòng)機(jī)懸置的振動(dòng)載荷和來(lái)自路面的各種沖擊,并能夠減弱路面和發(fā)動(dòng)機(jī)帶來(lái)的震動(dòng)和噪音,保證行駛舒適性和穩(wěn)定性。除此之外,副車架能提高汽車懸掛系統(tǒng)的連接剛度,裝有副車架的汽車能夠明顯感覺(jué)到底盤(pán)更扎實(shí)緊湊。
3735 4 2
仿真客 ??? 3年前
【iSolver案例分享65】汽車前副車架模態(tài)分析案例 
前副車架的模態(tài)與發(fā)動(dòng)機(jī)常用轉(zhuǎn)速下的激勵(lì)頻率很接近時(shí),副車架與發(fā)動(dòng)機(jī)的激勵(lì)頻率發(fā)生共振,整車便會(huì)產(chǎn)生轟鳴聲,影響整車的NVH值,降低汽車的使用壽命,影響乘客的舒適性。而如何科學(xué)地定義前副車架的模態(tài)目標(biāo)值是研究的重點(diǎn)。 本例中,為了研究副車架的模態(tài)和iSolver求解器計(jì)算精度,計(jì)算副車架自由狀態(tài)下的副車架前五階柔性模態(tài)。2.
2425
Paraboy ??? 1年前
某電動(dòng)汽車副車架CAE分析-Hypermesh網(wǎng)格劃分 
3-23網(wǎng)格單元質(zhì)量調(diào)節(jié)功能板塊經(jīng)過(guò)上述一系列的網(wǎng)格劃分、網(wǎng)格質(zhì)量檢測(cè)和網(wǎng)格質(zhì)量調(diào)整,將副車架吊耳、縱梁、副車架上板和下板以及副車架加強(qiáng)板轉(zhuǎn)化為網(wǎng)格單元,逐漸建立了符合要求的副車架網(wǎng)格模型,如圖3-24所示。
4004 15 4
我要開(kāi)GTR ??? 4年前
@設(shè)計(jì)工程師:7分鐘完成后副車架快速仿真,設(shè)計(jì)迭代快人一步! 
在CATIA環(huán)境中,設(shè)計(jì)工程師無(wú)需具備仿真經(jīng)驗(yàn),僅需確保模型數(shù)據(jù)規(guī)范,即可開(kāi)始仿真:</p><ul><li>進(jìn)入模型庫(kù),選擇“底盤(pán)部門”—“副車架”類別;</li><li>選中目標(biāo)“后副車架模型”,點(diǎn)擊“下一步”完成導(dǎo)入;</li><li>全程無(wú)需手動(dòng)調(diào)參數(shù),前置準(zhǔn)備時(shí)間顯著縮短。
999
迅筑科技-RPT ??? 1月前
Hyperworks底盤(pán)副車架從網(wǎng)格劃分到靜剛度、靜強(qiáng)度、模態(tài)頻率及振型及安裝點(diǎn)動(dòng)剛度仿真分析實(shí)例視頻教程 

本課程主要包含一下幾點(diǎn)內(nèi)容:1、底盤(pán)副車架本體的網(wǎng)格劃分,包括焊縫建模;2、副車架支架安裝點(diǎn)靜剛度仿真分析,包括局部坐標(biāo)系建模、約束、加載及后處理讀取;3、副車架本體靜強(qiáng)度仿真分析,即在loadcase載荷工況下,利用慣性釋放法來(lái)仿真計(jì)算副車架本體的強(qiáng)度應(yīng)力;4、副車架本體模態(tài)頻率及振型的仿真分析;5、副車架各安裝點(diǎn)動(dòng)剛度的仿真分析,方法為IPI原點(diǎn)法,分析類型為頻響分析,包含各卡片的設(shè)置以及
2103
辰巳午未 ??? 2年前
副車架自動(dòng)加載工具tcl 
副車架自動(dòng)加載工具tcl,有興趣的可以私聊
977
lz1234 ??? 6年前
基于CATIA有限元的開(kāi)檔消隙力計(jì)算方法研究 
3 某副車架擺臂開(kāi)檔方案優(yōu)化在上述副車架優(yōu)化前,實(shí)物接頭試驗(yàn)顯示接頭扭矩轉(zhuǎn)角曲線在彈性段斜率明顯分段,表明消隙力過(guò)大。在套管和U型開(kāi)檔間隙L為1.15-1.2 mm時(shí)的6個(gè)樣本平均消隙力F為36.68 k N。
3741 4
CATIA助手 ??? 2年前
某行走機(jī)構(gòu)多體動(dòng)力學(xué)與結(jié)構(gòu)強(qiáng)度聯(lián)合仿真分析 
圖1 結(jié)構(gòu)示意 根據(jù)行走結(jié)構(gòu)的實(shí)際工作原理,在MotionView中建立連接各部件恰當(dāng)?shù)霓D(zhuǎn)動(dòng)副、移動(dòng)副、油缸位移驅(qū)動(dòng)等,最終建立了整個(gè)行走機(jī)構(gòu)的多體動(dòng)力學(xué)模型,對(duì)機(jī)構(gòu)支車運(yùn)行過(guò)程進(jìn)行多體動(dòng)力學(xué)分析,得到了絲杠兩連接點(diǎn)的載荷歷程曲線如下圖2所示。
3174
CAE仿真學(xué)習(xí)菌 ??? 2年前
ADAMS汽車差速器模擬仿真 
3.四輪后驅(qū)動(dòng)小車模型建立 建立好的模型如上圖所示,首先左右半軸齒輪兩端建立輪胎模型(輪胎與半軸齒輪通過(guò)固定副相連),上文中建立了兩半軸與地面的旋轉(zhuǎn)副,在該模型上需要?jiǎng)h除,然后如上圖中間黃色球所示,建立一個(gè)車架,并建立兩半軸齒輪與車架的旋轉(zhuǎn)副,同理,刪除原有驅(qū)動(dòng)軸與地面的旋轉(zhuǎn)副,建立驅(qū)動(dòng)軸與車架的旋轉(zhuǎn)副。
5348 4 1
擺渡人張 ??? 2年前
OTPA 技術(shù)和CAE 分析相結(jié)合在解決路噪問(wèn)題中的應(yīng)用 
3 CAE分析 后輪的振動(dòng)激勵(lì)是通過(guò)后懸架和后副車架接附點(diǎn)傳遞到車身;排氣吊鉤3是焊接在后副車架上的,后副車架是柔接在車身上,排氣吊鉤3的振動(dòng)激勵(lì)是通過(guò)后副車架接附點(diǎn)傳遞到車身;225Hz左右輪胎聲腔模態(tài)的振動(dòng)也是通過(guò)后懸傳遞到車身上的,路噪問(wèn)題都集中在后懸各傳遞路徑上。利用CAE分析,對(duì)問(wèn)題路徑的車身結(jié)構(gòu)做進(jìn)一步排查,確認(rèn)車身是否存在導(dǎo)致路噪大的結(jié)構(gòu)問(wèn)題。
3413
碧海晴天3 ??? 4年前
DTAS 3D多約束裝配助力懸架公差分析&尺寸鏈計(jì)算:麥弗遜/雙叉臂/多連桿/H臂一網(wǎng)打盡 
如圖所示: 二、雙叉臂前懸與五連桿后懸的公差分析建模思路: 雙叉臂前懸主要建立如下的運(yùn)動(dòng)副,包括2個(gè)驅(qū)動(dòng)副,一個(gè)是輪跳的,另一個(gè)是轉(zhuǎn)向驅(qū)動(dòng)。 五連桿后懸懸架由于有5個(gè)連桿,所以與車架轉(zhuǎn)向節(jié)共有10個(gè)球副,減震器等可以建立滑塊副、球副等。輪跳驅(qū)動(dòng)建立在轉(zhuǎn)向節(jié)上。
2554
DTAS棣拓尺寸公差分析及尺寸鏈計(jì)算 ??? 12月前
為什么說(shuō)汽車底盤(pán)真不是個(gè)東西? 附汽車底盤(pán)基礎(chǔ)完整版下載 
這樣一副裸奔的車架,如果再刨去動(dòng)力相關(guān)的部分,剩下就可以稱之為底盤(pán)了,涇渭分明。 裸奔攬勝,大猩猩開(kāi)得不亦樂(lè)乎 展開(kāi)講,如今承載式車身大行其道,但大梁車架仍有用武之地,也不是沒(méi)有原因的。 硬派越野車偏愛(ài)非承載車身、大梁式車架,原因之一是讓車身結(jié)構(gòu)與大梁底盤(pán)可以彼此分離。
2490
灣灣梅 ??? 4年前
鑄造新聞:每天5分鐘,了解全新鑄造業(yè)(8月25日) 
濟(jì)源示范區(qū)24家鑄造行業(yè)企業(yè)相關(guān)負(fù)責(zé)人參加會(huì)議,副支隊(duì)長(zhǎng)陳建民主持會(huì)議。 二、威海伯特利汽車底盤(pán)輕量化項(xiàng)目新進(jìn)展 近日,位于威海乳山經(jīng)濟(jì)開(kāi)發(fā)區(qū)的伯特利汽車底盤(pán)輕量化項(xiàng)目,1號(hào)車間主結(jié)構(gòu)梁柱目前已安裝完成,2號(hào)車間正在進(jìn)行基礎(chǔ)梁柱建設(shè)。據(jù)介紹,該項(xiàng)目是威海伯特利汽車安全系統(tǒng)有限公司建設(shè)的三期鑄鋁副車架制造項(xiàng)目,是該企業(yè)今年新上的項(xiàng)目,于今年2月開(kāi)工建設(shè)。
1850
鑄造工程師 ??? 3年前
汽車底盤(pán)系統(tǒng)的解決方案 
制動(dòng)系利用與車身或車架相連的非旋轉(zhuǎn)原件和車輪或傳動(dòng)軸相連的旋轉(zhuǎn)元件之間的相互摩擦來(lái)阻止車輪的轉(zhuǎn)動(dòng)或轉(zhuǎn)動(dòng)的趨勢(shì),并將運(yùn)動(dòng)的車輪的動(dòng)能轉(zhuǎn)化為摩擦副的熱能耗散到大氣中。因此制動(dòng)系的工作過(guò)程中的磨損,已經(jīng)熱固耦合分析,以及由于剎車盤(pán)與剎車片之間的摩擦引起的尖嘯聲,都是分析的重點(diǎn)。(1)轉(zhuǎn)向管柱強(qiáng)度分析汽車轉(zhuǎn)向管柱作為駕駛員操控汽車的重要部件,其安全性和可靠性顯得尤為重要。
2815 9 3
【已注銷】 ??? 3年前
輕量化技術(shù)和材料在汽車工程中的應(yīng)用 
馬芳武等針對(duì)汽車某車型后副車架,通過(guò)多目標(biāo)優(yōu)化方法,并將副車架縱梁材質(zhì)由低碳鋼S550MC變更為鋁合金6061,使副車架總成的質(zhì)量由16.6 kg降低至14.19 kg,減重2.41 kg,減重比例為14.5%。
3481 1
芝能汽車 ??? 3年前
電動(dòng)車驅(qū)動(dòng)電機(jī)振動(dòng)噪聲研究綜述 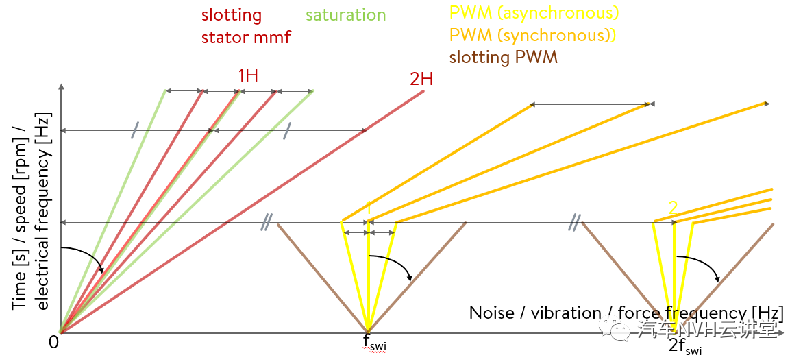
2008年蔡建江對(duì)驅(qū)動(dòng)電機(jī)一副車架懸置系統(tǒng)進(jìn)行建模并仿真,提出電機(jī)懸置的隔振性能對(duì)高速工況下車內(nèi)噪聲有主要作用,通過(guò)改善懸置隔振性能和副車架剛度是改善車內(nèi)噪聲的有效途徑。
2816 1 1
聲學(xué)工程師小吳 ??? 2年前
底盤(pán)零部件路譜轉(zhuǎn)臺(tái)架詳解 
而對(duì)于是否需要對(duì)所有路面都進(jìn)行轉(zhuǎn)譜工作的問(wèn)題,也需要工程師進(jìn)行提前識(shí)別,因?yàn)槌R?guī)耐久試驗(yàn)所對(duì)應(yīng)的每條不同的路面,針對(duì)的也是不同的產(chǎn)品,例如垂向主要針對(duì)彈簧、減振器、緩沖塊和副車架等、側(cè)向和縱向針對(duì)控制臂、轉(zhuǎn)向節(jié)和副車架等、扭曲路針對(duì)穩(wěn)定桿和扭力梁等等,對(duì)于一個(gè)特定零件,那些路面受力較小,產(chǎn)生的損傷是否可以忽略,也是需要進(jìn)一步研究和探索的。
2107 3 1
辰巳午未 ??? 2年前
Isight集成HyperMesh、Optistruct 
</div><div contenteditable="false" width="100%"><br></div><div contenteditable="false" width="100%">本例研究汽車副車架的強(qiáng)度、模態(tài)和質(zhì)量表現(xiàn),主要針對(duì)副車架的梁板厚進(jìn)行優(yōu)化。
2167 3
溫舊酒一壺 ??? 2年前
Raise3D復(fù)志科技發(fā)布纖維增強(qiáng)材料3D打印白皮書(shū) 
例如,由碳纖維增強(qiáng)樹(shù)脂制成的自行車車架擁有與鋼制成的車架相同的強(qiáng)度和剛度,但重量卻只有鋼的1/5。 纖維增加熱塑性復(fù)合材料在工業(yè)上的應(yīng)用碳纖維增強(qiáng)塑料具有優(yōu)異的強(qiáng)度重量比,這使其成為金屬結(jié)構(gòu)部件的理想替代品。
3646
Raise3D復(fù)志科技 ??? 3年前
案例19 挖掘機(jī)臂裝配體的瞬態(tài)動(dòng)力學(xué)分析 
挖掘機(jī)裝配體的各種部件通過(guò)節(jié)點(diǎn)互相連接,兩個(gè)活塞缸裝置的啟動(dòng)導(dǎo)致車架、臂和連桿移動(dòng),從而也使翻斗移動(dòng)。整個(gè)系統(tǒng)基本上有兩個(gè)自由度。 車架、臂、連桿和翻斗的移動(dòng)依賴于兩個(gè)自由度,本問(wèn)題中,挖掘機(jī)臂的移動(dòng)被限制為面內(nèi)移動(dòng)。 多體系統(tǒng)的瞬態(tài)動(dòng)力學(xué)分析包含下列內(nèi)容: 1. 第一個(gè)分析假設(shè)連接桿為柔性的,其他所有部分為剛體,柔性部分使用三維有限元建模。 2.
3340 8 1
龍飛宇 ??? 3年前
20條/頁(yè) 
跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
