



Creo 7.0從圖片到運動機構(gòu)仿真動畫 

利用Creo建模,探索從圖片到真正可以模擬、甚至可以生產(chǎn)借用的運動機構(gòu)。快速模擬仿真,可能使用Altair Inspire Motion運動仿真機構(gòu)。適用人群:①學(xué)習(xí)機械原理、機械設(shè)計、機械創(chuàng)新設(shè)計的學(xué)生,需要提交相關(guān)的作業(yè)②參加各種機械設(shè)計大賽的學(xué)生、朋友③產(chǎn)品結(jié)構(gòu)設(shè)計工程師,需要設(shè)計驗證產(chǎn)品的傳遞合理性④需要進(jìn)行產(chǎn)品展示運動原理、內(nèi)部運動情況的設(shè)計師
255 3
蝰蛇設(shè)計 ??? 5年前
基于ADAMS的助老起升裝置的運動學(xué)仿真分析 
2 ADAMS 虛擬樣機的運動學(xué)仿真分析 利用多體動力軟件 ADAMS 對裝置進(jìn)行運動學(xué) 及動力學(xué)仿真分析。 2.1 模型導(dǎo)入 首先在 CROE 中對建立好的裝配模型進(jìn)行簡化, 在保證模擬真實工況的前提下,省去螺栓、角件等零 件,后續(xù)用布爾操作來代替[7]。然后將簡化后的模 型另存為 ADAMS 軟件可識別的.x_t 文件,并導(dǎo)入到 ADAMS2018,完成基本的單位設(shè)置。
2598 5
擺渡人張 ??? 2年前
某型號接觸器--開關(guān)的觸頭電弧運動仿真分析 
因此,研究接觸器觸頭電弧運動特性,對接觸器的設(shè)計與改進(jìn)至關(guān)重要。2.計算難點 傳統(tǒng)對電弧的研究主要以實驗為主,但電弧運動涉及流場、熱場和電磁場等復(fù)雜變化過程,實驗研究難度較大。隨著計算機計算性能和仿真軟件技術(shù)的進(jìn)步,電弧仿真逐漸成為可能,且仿真結(jié)果的準(zhǔn)確性大大提高。通過仿真分析,可以在虛擬環(huán)境中模擬電弧運動過程,深入了解電弧特性,為接觸器的優(yōu)化設(shè)計提供依據(jù)。
2769 4
大龍貓?? ??? 12月前
三自由度機械臂運動學(xué)分析+仿真 
建立坐標(biāo)系 1正運動學(xué)分析 采用標(biāo)準(zhǔn)的D-h法進(jìn)行機械腿模型分析: 將連桿坐標(biāo)系的原點建立在連桿的關(guān)節(jié)連桿末端。 一、建立D-H連桿坐標(biāo)系的原則 1.Z,軸沿關(guān)節(jié)軸i+1的軸向。 2.原點O為Zi.,與Zi軸的交點或其公垂線與關(guān)節(jié)軸Zi的交點。3.Xi軸沿Zi與Zi軸的公垂線方向,由關(guān)節(jié)軸i指向關(guān)節(jié)軸i+1。
3986
余俊煒 ??? 2年前
基于AMESim仿真分析軟件的氣動閥門運動特性研究 AMESim氣動附軟件下載 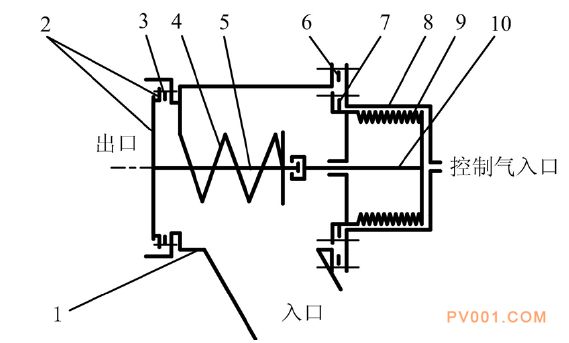
3 結(jié) 論 基于AMESim軟件仿真技術(shù),確定了氣動閥門內(nèi)部閥桿和頂桿的運動規(guī)律,提出氣動閥門在運動中可能發(fā)生頂桿與閥桿的反向碰撞問題,并可能給頂桿或閥桿帶 來損傷。為確定仿真分析的正確性,采取了非接觸測量閥桿的運動速度,其結(jié)果與仿真結(jié)果基本一致。根據(jù)分析提出了加注閥存在的設(shè)計缺陷,并在試驗中得到驗 證,根據(jù)閥門內(nèi)部的運動規(guī)律分析,給出了降低閥桿運動速度的意見。
2569 1
仿真客 ??? 3年前
基于Adams的六足直立式步行機器人運動仿真分析 
首先,利用矢量解析法對步行腿機構(gòu)建立相應(yīng)運動數(shù)學(xué)模型并分析;再利用虛擬樣機分析軟件Adams對單側(cè)步行腿機構(gòu)進(jìn)行運動軌跡建模仿真分析;最后,搭建實物樣機驗證了工作原理、方案設(shè)計、虛擬仿真結(jié)果的正確性和可行性。結(jié)果表明,步行腿機構(gòu)的運動特性能夠滿足六足直立式步行機構(gòu)的工作要求,設(shè)計方案可行,可為下一步的動力學(xué)分析和優(yōu)化設(shè)計提供理論基礎(chǔ)。
4178 7 8
仿真客 ??? 3年前
MCCB觸頭打開電弧運動過程仿真分析 
電弧分析是斷路器設(shè)備的重點與難點,主要考慮流體分析、熱分析、電場分析、磁場分析,其難度是最大的地方是如何讓電弧更改好的進(jìn)入柵片,本次分析的是經(jīng)典案例,將MCCB的觸頭分開,那么觸頭之間產(chǎn)生電弧,在ANSYS分析中能夠更好的獲取電弧的運動趨勢,觀察電弧將進(jìn)入柵片的過程溫度變化過程如圖所示 電流變化過程如圖所示 電壓出現(xiàn)下降趨勢,結(jié)果如圖
2656 3 1
電弧仿真 ??? 4年前
基于ANSYS軟件的1+6鋼絲繩網(wǎng)格劃分策略及仿真 
鋼絲繩由于具有復(fù)雜的螺旋捻制結(jié)構(gòu),內(nèi)部鋼絲之間存在非線性接觸特征,常規(guī)的理論計算無法準(zhǔn)確獲取鋼絲繩內(nèi)部的力學(xué)和運動特性,因此本文主要借助有限元仿真軟件ANSYS對其進(jìn)行研究。ANSYS有限元軟件廣泛應(yīng)用于機械領(lǐng)域,不僅能夠進(jìn)行簡單的靜力學(xué)仿真計算,還能夠進(jìn)行非線性的力學(xué)仿真求解[1]。本文主要針對1+6鋼絲繩進(jìn)行研究,具體分析鋼絲繩有限元建模方法和鋼絲繩內(nèi)部鋼絲受力和運動情況。
5819 3 5
Infiniteelements ??? 2年前
203基于matlab的曲柄滑塊機構(gòu)的運動學(xué)仿真分析GUI 
基于matlab的曲柄滑塊機構(gòu)的運動學(xué)仿真分析GUI,包括《系統(tǒng)仿真與matlab》綜合試題文檔。分析滑塊速度、角速度,曲軸投影長。曲柄滑塊機構(gòu)的動畫。程序已調(diào)通,可直接運行。
2221
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
202基于matlab的曲柄滑塊機構(gòu)的運動學(xué)仿真分析 
基于matlab的曲柄滑塊機構(gòu)的運動學(xué)仿真分析,分析各個桿的速度、位移、加速度曲線,以及曲柄滑塊機構(gòu)的動畫。程序已調(diào)通,可直接運行。
2152
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
軸流風(fēng)機(旋轉(zhuǎn)機械)流體仿真在CREO7軟件環(huán)境下的操作 
7.4多角度多工具對結(jié)果解讀及分析針對CREO flow analysis教程匱乏現(xiàn)象,經(jīng)作者研究提煉總結(jié)本視頻深入淺出講解CREO 7.0 流體仿真(CFD)關(guān)于流體“旋轉(zhuǎn)機械“仿真實戰(zhàn)操作,以現(xiàn)場操作、步驟講解、模型優(yōu)化、提煉重點、總結(jié)經(jīng)驗,經(jīng)驗分享等方式對流體”運動學(xué)_旋轉(zhuǎn)機械“現(xiàn)象在仿真操作過程進(jìn)行總結(jié),希望能夠和朋友們一起學(xué)習(xí)進(jìn)步。
1467 1 33
王鑫敏 ??? 2年前
Creo Simulation Live結(jié)構(gòu)仿真功能應(yīng)用 
然后可以對分析結(jié)果進(jìn)行可視化,且無需詳細(xì)了解設(shè)計。 如果您是分析師,可以通過實時仿真使用概念設(shè)計的結(jié)果,并減少設(shè)計后期通常需要的高真實度仿真的數(shù)量。 本篇,主要介紹Creo Simulation Live結(jié)構(gòu)仿真模塊的基本功能和使用場景。
4145 3 2
建哥CREO ??? 3年前
基于CFX的氣泡在矩形柱中的擴散運動仿真分析計算 
基于CFX的氣泡在矩形柱中的擴散運動仿真分析計算
1151
寧博士CAE團(tuán)隊 ??? 4年前
快訊 | PTC宣布推出Creo 9 
此外,劃分表面這一新功能可幫助用戶改進(jìn)分析效率、完善產(chǎn)品定義。 大幅度升級仿真與創(chuàng)成式設(shè)計功能 Creo仿真系列產(chǎn)品現(xiàn)已集成Ansys先進(jìn)多重物理技術(shù)。
2268
陽普科技 ??? 4年前
Moldex3D模流分析SYNC for PTC Creo之快速范例教學(xué) 
基本概念 ( Basic Concept )本章教程帶您快速的從頭開始分析簡易射成型的仿真工作流程,并分成以下部分:準(zhǔn)備模型、準(zhǔn)備分析。注:本章教學(xué)中所介紹的功能僅供演示目的,SYNC 支持更多、更多樣的分析功能。本章教學(xué)所涵蓋的功能如下表所列,其更詳細(xì)的功能介紹和參數(shù)定義將與其他功能一起在前面的章節(jié)中進(jìn)行介紹。
2800 1
Moldex3D 中國 ??? 2年前
Moldex3D模流分析SYNC之for PTC Creo模擬可制造性設(shè)計 
sDFM 的格式包括基本信息、每個分析項目的驗證狀態(tài)以及仿真結(jié)果的屏幕截圖。
4162 3
Moldex3D 中國 ??? 2年前
基于DeltaD打印機的剛?cè)狁詈?em>運動學(xué)分析 
摘 要:為避免打印機工作過程中出現(xiàn)運動突變和沖擊,影響打印精度等問題,以Delta打印機為研究對象,完成3D打印機的模型繪制,分析其運動學(xué)求解過程,建立打印機的運動學(xué)方程,并借助Matlab和Adams軟件完成對運動學(xué)方程的驗證.借助Hypermesh對關(guān)鍵部件柔性化處理,完成剛?cè)狁詈?em>仿真驗證,對特定工況下傳動誤差?位移?速度和加速度進(jìn)行分析,驗證了模型設(shè)計的合理性.
4396 3
擺渡人張 ??? 2年前
ADAMS行星齒輪機構(gòu)運動學(xué)及動力學(xué)仿真 
3.2 動力學(xué)仿真 設(shè)置仿真時間為1s,仿真步數(shù)為1000,進(jìn)行仿真分析,分析完成后查看仿真結(jié)果。 3.3 運動角速度分析 輸入軸太陽輪和輸出軸行星支架的角速度曲線如圖所示,由圖可以看出輸出軸行星支架轉(zhuǎn)速在不斷波動并有大量毛刺,這是由于齒輪間的間隙、剛度和接觸非線性引起的。
4599 8 1
劉曉東 ??? 2年前
Creo結(jié)構(gòu)靜力學(xué)分析設(shè)置流程 
在進(jìn)行Creo仿真分析前,需注意工作目錄路徑不能含有中文;本例基于Creo9.0軟件;本例分析結(jié)構(gòu)在自重下的變形。 01 打開Simulate 在菜單欄選擇應(yīng)用程序——仿真——Simulate。
6920 1 1
張偉一 ??? 2年前
渦旋壓縮機轉(zhuǎn)軸系統(tǒng)動平衡設(shè)計與仿真驗證 
在結(jié)構(gòu)分析和理論計算基礎(chǔ)上,確定了合理的平衡鐵形狀、質(zhì)量(m1,m2 )及分布位置(L1,L2 )。構(gòu)建了基于 ADAMS/View 平臺的轉(zhuǎn)軸系統(tǒng)仿真模型,通過剛體動力學(xué)仿真和誤差分析驗證了動平衡設(shè)計方案的正確性。分析結(jié)果顯示:平衡鐵Ⅰ和Ⅱ的離心慣性力設(shè)計誤差很小,分別為 0.39% 和 0.06%,符合機械精度設(shè)計要求。
3817 2 2
我愛汽輪機仿真 ??? 2年前
20條/頁 
 60
60 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
