



DTAS 3D多約束裝配助力懸架公差分析&尺寸鏈計(jì)算:麥弗遜/雙叉臂/多連桿/H臂一網(wǎng)打盡 
五連桿后懸懸架由于有5個(gè)連桿,所以與車架轉(zhuǎn)向節(jié)共有10個(gè)球副,減震器等可以建立滑塊副、球副等。輪跳驅(qū)動(dòng)建立在轉(zhuǎn)向節(jié)上。 五連桿后懸除了運(yùn)動(dòng)副建模以外,也可以采用多約束裝配的建模方法,如下圖所示。使用多約束裝配控制轉(zhuǎn)向節(jié)安裝點(diǎn)與副車架安裝點(diǎn)之間的距離,最終控制轉(zhuǎn)向節(jié)的最終姿態(tài)。多約束裝配不僅適用于五連桿后懸,也適用于其它各類型的前后懸架。
2554
DTAS棣拓尺寸公差分析及尺寸鏈計(jì)算 ??? 12月前
基于Ansys Twin Builder連桿結(jié)構(gòu)數(shù)字孿生體建模關(guān)鍵技術(shù)及應(yīng)用 
圖3 連桿載荷識(shí)別流程圖 (1) 連桿單位載荷工況應(yīng)變結(jié)果求解 在利用Ansys Mechanical獲得連桿單位載荷加載的*.rst結(jié)果文件過(guò)程中,需要注意兩點(diǎn):其一是連桿限元模型中要在計(jì)劃貼片區(qū)域設(shè)置殼單元;其二是該連桿繞Z軸轉(zhuǎn)動(dòng),故模型在XY平面內(nèi)施加單位載荷。
2565 2
上海安世亞太 ??? 4年前
3DCC V7.0 視頻演示(三)|汽車多連桿懸架裝配約束功能 
在傳統(tǒng)通用約束建模方式下,工程人員往往需要逐一處理各連桿之間的約束關(guān)系,容易出現(xiàn)過(guò)約束或自由度控制不當(dāng)?shù)膯?wèn)題,建模效率與工程一致性難以保證。3DCC V7.0 針對(duì)這一典型結(jié)構(gòu),新增多連桿懸架專用裝配約束能力,對(duì)場(chǎng)景結(jié)構(gòu)進(jìn)行工程化抽象,實(shí)現(xiàn)關(guān)鍵運(yùn)動(dòng)關(guān)系的統(tǒng)一表達(dá),并顯著降低復(fù)雜裝配場(chǎng)景下的建模難度。
2407
笑酒仙 ??? 3月前
Adams&Workbench&Matlab四連桿機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析 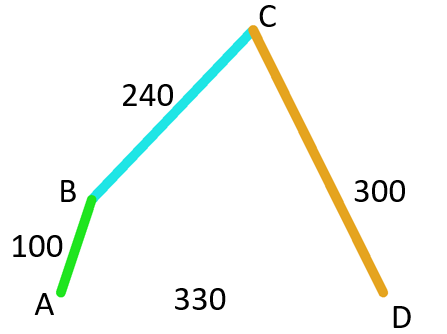
圖3 運(yùn)動(dòng)動(dòng)畫(huà)(Adams) 0 2 Workbench分析 使用三維建模軟件SolidWorks模型創(chuàng)建,其尺寸與圖1中一致。
2809
擺渡人張 ??? 2年前
基于ADAMS的點(diǎn)按手法運(yùn)動(dòng)仿真 
Denavit和Hartenberg提出了一種描述機(jī)器人手臂連桿之間運(yùn)動(dòng)關(guān)系的方法,用連桿長(zhǎng)度ai、連桿轉(zhuǎn)角αi、連桿偏距di及關(guān)節(jié)角θi這4個(gè)參數(shù)來(lái)描述機(jī)器人手臂連桿之間的運(yùn)動(dòng)關(guān)系。機(jī)器人手臂中建立坐標(biāo)系的步驟:(1)找出各關(guān)節(jié)軸,并標(biāo)出這些軸線的延長(zhǎng)線。在下述步驟(2)~步驟(5),僅考慮兩個(gè)相鄰的軸線。
3009 2
擺渡人張 ??? 2年前
ANSYS Workbench連桿瞬態(tài)動(dòng)力學(xué)仿真 
</p><p>(2)與其他建模軟件的兼容性:</p><p>ANSYS Workbench具備與其他計(jì)算機(jī)輔助設(shè)計(jì)(CAD)和計(jì)算機(jī)輔助工程(CAE)軟件的兼容性,支持模型的導(dǎo)入與導(dǎo)出。這一特性允許工程師利用多種軟件的優(yōu)勢(shì),進(jìn)行更為復(fù)雜的設(shè)計(jì)和分析,同時(shí)保持?jǐn)?shù)據(jù)的完整性和準(zhǔn)確性。
3406 3
力學(xué)AI有限元 ??? 12月前
3DCS懸架建模專題 

本次課程集中針對(duì)底盤(pán)懸架的偏差建模,內(nèi)容大綱如下: 1、麥弗遜前懸架四輪定位靜態(tài)偏差建模;2、雙叉臂前懸架四輪定位動(dòng)態(tài)偏差建模第一部分;3、雙叉臂前懸架四輪定位動(dòng)態(tài)偏差建模第二部分;4、多連桿后懸架四輪定位動(dòng)態(tài)偏差建模。 其中,前三章節(jié)內(nèi)容和“3DCS提升之全模塊實(shí)戰(zhàn)演練”課程中運(yùn)動(dòng)模塊部分有所重復(fù),請(qǐng)大家根據(jù)自己的需要甄別購(gòu)買(mǎi)。
901 15
3DCS公差分析 ??? 6年前
基于Adams的六足直立式步行機(jī)器人運(yùn)動(dòng)仿真分析 
進(jìn)入Adams-View[10]模塊環(huán)境中,通過(guò)工具箱中的建模工具面板選擇連桿工具圖標(biāo),根據(jù)中間步行腿機(jī)構(gòu)各連桿桿件質(zhì)量特性、尺寸和初始位置,創(chuàng)建中間步行腿機(jī)構(gòu)幾何模型,如表1所示。然后,創(chuàng)建各連桿之間的旋轉(zhuǎn)運(yùn)動(dòng)副,其中,O 點(diǎn)、D 點(diǎn)是固定旋轉(zhuǎn)運(yùn)動(dòng)副,lFG 是連桿lEF 的延伸部分,兩桿繞著F 點(diǎn)隨曲柄lOF 同時(shí)旋轉(zhuǎn)運(yùn)動(dòng)。
4178 7 8
仿真客 ??? 3年前
Abaqus中發(fā)動(dòng)機(jī)曲柄連桿機(jī)構(gòu)動(dòng)力學(xué)模擬 
講解了發(fā)動(dòng)機(jī)曲柄連桿機(jī)構(gòu)(缸體+活塞+連桿+曲軸)動(dòng)力學(xué)模擬的建模流程及方法,曲軸轉(zhuǎn)動(dòng)720度,各活塞往復(fù)運(yùn)動(dòng)兩次。
395 3
楊紅波 ??? 2年前
基于ABAQUS曲軸連桿轉(zhuǎn)動(dòng)瞬態(tài)分析 
基于ABAQUS曲軸轉(zhuǎn)動(dòng)瞬態(tài)分析 UG建模->導(dǎo)入ABAQUS 運(yùn)動(dòng)副創(chuàng)建: 轉(zhuǎn)動(dòng)副(曲軸與連桿、連桿與活塞): 1.創(chuàng)建兩個(gè)相對(duì)運(yùn)動(dòng)結(jié)構(gòu)的RP參考點(diǎn) 2.RP點(diǎn)之間創(chuàng)建Wire特征作為轉(zhuǎn)動(dòng)副載體 3.創(chuàng)建轉(zhuǎn)動(dòng)副即Hinge 4.創(chuàng)建局部坐標(biāo)系 5.將轉(zhuǎn)動(dòng)副賦予Wire 6.將參考點(diǎn)與相應(yīng)結(jié)構(gòu)的控制區(qū)域進(jìn)行coupling耦合
2894 6 2
不是真正的工程師 ??? 4年前
案例19 挖掘機(jī)臂裝配體的瞬態(tài)動(dòng)力學(xué)分析 
建模剛體 剛體部分的建模使用基于MPC剛體目標(biāo)定義,如下列連接桿: 連桿通過(guò)下列方法建模為剛體: 1. 一個(gè)質(zhì)量等于連桿的質(zhì)量單元定義在質(zhì)量B的中心 2. 定義在質(zhì)量單元B處的節(jié)點(diǎn)為使用TARGE170單元的引導(dǎo)點(diǎn) 3. 標(biāo)識(shí)連桿連接其他部分的位置(A和B) 4. 在質(zhì)量單元和標(biāo)識(shí)的位置之間定義TARGE170單元(A和B,B和C) 5.
3339 8 1
龍飛宇 ??? 3年前
ANSYS-WorkBench教程 曲柄連桿機(jī)構(gòu)剛?cè)狁詈稀⑽佪單仐U瞬態(tài)動(dòng)力學(xué)有限元仿真 
本課程結(jié)合工程實(shí)際,使用workbench軟件對(duì)曲柄連桿機(jī)構(gòu)與蝸輪蝸桿的工作過(guò)程進(jìn)行仿真,課程包含:曲柄連桿機(jī)構(gòu)及曲柄滑塊(除運(yùn)動(dòng)副的設(shè)置外、還設(shè)置了摩擦副)。運(yùn)用瞬態(tài)分析模塊,介紹了分析子步與計(jì)算收斂性的設(shè)置。詳細(xì)展示瞬態(tài)分析的建模流程與參數(shù)設(shè)置的過(guò)程,并配有詳盡的仿真案例。
452 3
伍欣然 ??? 5年前
4.25開(kāi)播 | Adams Car系列講座一:車輛動(dòng)力學(xué)建模 
車輛動(dòng)力學(xué)建模—后五連桿懸架建模 車輛動(dòng)力學(xué)建模—穩(wěn)定桿建模 講師介紹
3422 5 1
技術(shù)鄰公告 ??? 3年前
基于ADAMS的助老起升裝置的運(yùn)動(dòng)學(xué)仿真分析 
根據(jù)裝置的使用環(huán)境及人體標(biāo)準(zhǔn)工位尺寸, 確定該裝置的其他構(gòu)件尺寸及主體框架結(jié)構(gòu),在 CROE3.0 中,根據(jù)實(shí)際模型尺寸進(jìn)行 1 ∶ 1 建模,其三 維實(shí)體模型如圖 2 所示。2 ADAMS 虛擬樣機(jī)的運(yùn)動(dòng)學(xué)仿真分析 利用多體動(dòng)力軟件 ADAMS 對(duì)裝置進(jìn)行運(yùn)動(dòng)學(xué) 及動(dòng)力學(xué)仿真分析。
2598 5
擺渡人張 ??? 2年前
設(shè)計(jì)仿真 | Adams-Marc聯(lián)合仿真幫助客戶準(zhǔn)確模擬車門(mén)關(guān)閉過(guò)程 
密封件使用超彈性材料特性建模,以準(zhǔn)靜態(tài)工況模擬關(guān)門(mén)時(shí),每單位長(zhǎng)度的密封件會(huì)產(chǎn)生關(guān)門(mén)力。該模擬還預(yù)測(cè)了密封件填充車門(mén)和相鄰的車身鈑金件之間的間隙能力。面對(duì)挑戰(zhàn)一位Standard Profil的客戶咨詢是否可以通過(guò)模擬完整的關(guān)門(mén)過(guò)程來(lái)預(yù)測(cè)關(guān)門(mén)所需的初始速度。門(mén)的關(guān)閉是門(mén)上各部件之間的復(fù)雜相互作用的結(jié)果,例如鎖、密封條、空氣滯留效應(yīng)、鉸鏈軸和止回連桿等。
2395 1
??怂箍翟O(shè)計(jì)與仿真 ??? 1年前
ADAMS履帶小車仿真 
(用于這兩個(gè)支撐導(dǎo)輪的前后運(yùn)動(dòng)),具體如下: ③履帶小車約束副的建立:首先在所有的的鏈節(jié)間建立旋轉(zhuǎn)副: 然后建立鏈輪、支撐輪與車身(小球)的旋轉(zhuǎn)副: 最后在左側(cè)連桿與車身間建立固定副,在左側(cè)與右側(cè)連桿間建立移動(dòng)副,在右側(cè)連桿與支撐導(dǎo)輪間建立旋轉(zhuǎn)副,這樣支撐導(dǎo)輪就可以前后的伸縮了,具體如下:
3369 2
擺渡人張 ??? 2年前
并聯(lián)機(jī)械手爪運(yùn)動(dòng)學(xué)分析 
2.4.4 對(duì)象模型創(chuàng)建 運(yùn)用MATLAB軟件的Link函數(shù)將上文采摘機(jī)器手爪已確立的主要參數(shù)代入完成整個(gè)模型建模。Link函數(shù)格式如下: L=Link([theta,d,a,alpha]) (2.8) 該式中,theata為關(guān)節(jié)角;d為連桿偏距;a為連桿長(zhǎng)度;alpha為連桿轉(zhuǎn)角。
2284
余俊煒 ??? 2年前
UG NX齒輪齒條建模裝配仿真綜合講解 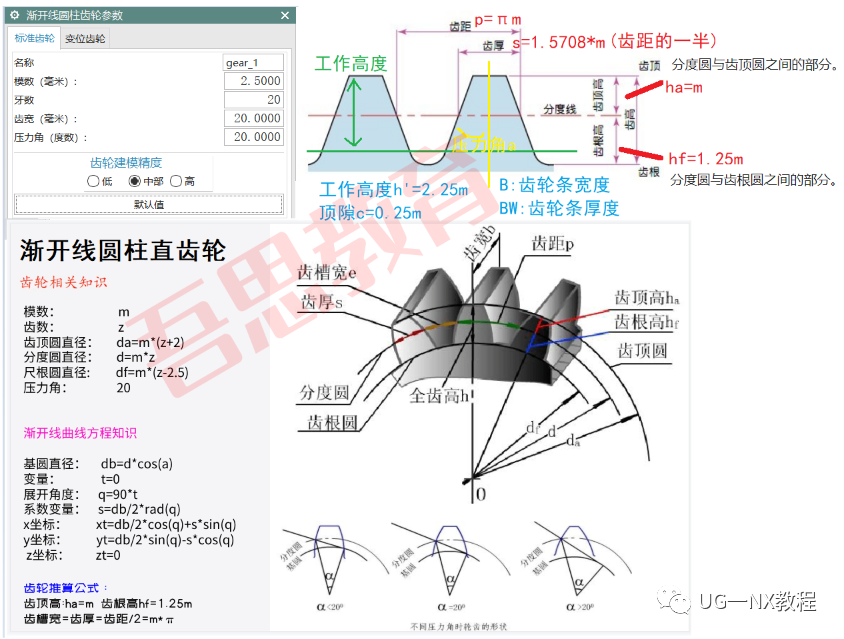
擬合完成進(jìn)入運(yùn)動(dòng)仿真進(jìn)行運(yùn)動(dòng)動(dòng)畫(huà),這里的運(yùn)動(dòng)形式是拉動(dòng)齒輪條帶動(dòng)齒輪旋轉(zhuǎn),運(yùn)動(dòng)仿真步驟是: 1.首先進(jìn)入運(yùn)動(dòng)仿真模塊,然后新建運(yùn)動(dòng)仿真 2.按照運(yùn)動(dòng)仿真三部曲,將要?jiǎng)拥姆謩e設(shè)為連桿(1847版本為運(yùn)動(dòng)體) 2.齒輪條運(yùn)動(dòng)方式為滑動(dòng),添加一個(gè)滑動(dòng)副。
4378 1
張偉一 ??? 3年前
福特汽車使用Adams開(kāi)發(fā)創(chuàng)新的懸架設(shè)計(jì) 
Adams Car 是在Adams 框架基礎(chǔ)上開(kāi)發(fā)的基于模板的車輛建模解決方案。使用 Adams Car 的工程師可以構(gòu)建車輛系統(tǒng)或子系統(tǒng)的虛擬樣機(jī),并通過(guò)車輛工況庫(kù)測(cè)試其性能。在扭力梁懸架模型中,輪轂、前框架和前下部控制臂均建模為柔性體。該團(tuán)隊(duì)廣泛使用Adams仿真來(lái)評(píng)估設(shè)計(jì)概念,并再次驗(yàn)證力矢量彈簧。
2473 1 1
Cruise ??? 3年前
如何快速建立大型多體動(dòng)力學(xué)模型 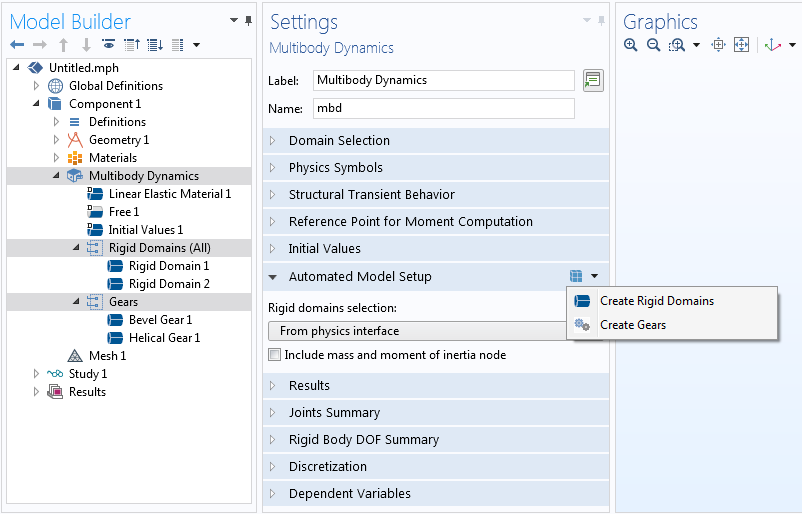
三缸往復(fù)式發(fā)動(dòng)機(jī)教程模型就是這樣一個(gè)例子,除了中央連桿之外的所有零件都必須建模為剛體。你可以通過(guò)剛性域選擇菜單解決這類建模問(wèn)題,該菜單列出了所有可用的域選擇。為所有剛性組件創(chuàng)建一個(gè)新域選擇,如果不存在,在剛性域選擇中將其設(shè)置為輸入。在這種情況下,僅為選擇的那些對(duì)象創(chuàng)建剛性域。 在三缸往復(fù)式發(fā)動(dòng)機(jī)模型中,創(chuàng)建了一個(gè)名為剛性域的新的域選擇,其中包含除中央連桿之外的所有域。
3242 1
CAE仿真學(xué)習(xí)菌 ??? 2年前
20條/頁(yè) 
跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
