



214基于matlab的交互多模算法(IMM)機動目標跟蹤算法 
根據(jù)二維空間內(nèi)目標作勻速直線運動和勻速圓周運動的特點,在建立目標運動模型和觀測模型的基礎(chǔ)上采用基于交互多模算法(IMM)的卡爾曼濾波器對機動目標進行跟蹤。仿真結(jié)果表明,該算法不僅能夠?qū)?em>勻速直線運動和勻速圓周運動的目標進行跟蹤,而且在運動模型發(fā)生變化時,濾波誤差也比較小。程序已調(diào)通,可直接運行。
2120
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
基于機械系統(tǒng)動力學(xué)自動分析的多噴頭3D打印機運動學(xué)研究 
在ADAMS中設(shè)置運動副的驅(qū)動函數(shù),運動軌跡如圖5所示。2個噴頭在同一運動軌跡上后,行星電機繞工作臺勻速運動,設(shè)置好打印件的層高等參數(shù),縱向電機就會旋轉(zhuǎn)1個步距角,逐層向上完成打印工作。圖5 協(xié)同打印 3 結(jié)束語本文所設(shè)計的3D打印機,基于柱坐標系設(shè)計。主要采取外嚙合行星齒輪的方法,使2個柱座在工作臺上實現(xiàn)打印工作。
4504 4
擺渡人張 ??? 2年前
顆粒流介紹 附UDEC4.0破解版下載
(5)相對性:自然界中存在著一種坐標系,在這種坐標系中,當物體不受力時將保持勻速直線運動或靜止狀態(tài),這樣的坐標系叫慣性參照系。地面和相對于地面靜止或作勻速直線運動的物體可以看作是慣性參照系,牛頓定律只在慣性參照系中才成立。(6)獨立性:作用在物體上的各個力,都能各自獨立產(chǎn)生一個加速度,各個力產(chǎn)生的加速度的矢量和等于合外力產(chǎn)生的加速度。
2773
裝腔 ??? 4年前
使用 COMSOL 對慣性傳感器進行仿真 
為了解釋這個器件是如何工作的,我們來考慮當器件相對于它的參考坐標靜止或勻速運動(沒有線性或旋轉(zhuǎn)加速度的運動)時尖齒的行為。我們將研究當器件旋轉(zhuǎn)時尖齒的行為如何變化。施加到驅(qū)動尖頭的電信號導(dǎo)致感應(yīng)尖頭在 xy 平面中以它們的諧振頻率振動。當設(shè)備繞 y 軸旋轉(zhuǎn)時,科里奧利力會導(dǎo)致面外振動,如下圖所示。
2747
我是小能 ??? 3年前
汽車自動駕駛輔助系統(tǒng)電磁安全性研究 
(a)穩(wěn)態(tài)勻速巡航工況 圖2為車輛穩(wěn)態(tài)巡航工況示意圖,目標車與被測車輛相對車速為0,相對距離保持30m不變,被測車輛以40km/h的速度運行后,按照表1調(diào)整目標模擬器參數(shù)設(shè)置,啟動被測車輛ACC功能,使其進入穩(wěn)態(tài)勻速巡航工況(見圖 3)。 (b)動態(tài)巡航工況 圖4為車輛動態(tài)巡航工況循環(huán)示意圖,目標模擬車與被測車輛循環(huán)進行減速靠近、勻速跟車以及加速遠離運動工況。
2446
順風(fēng)起飛 ??? 4年前
當ABAQUS模型涉及歐拉元素的初速度設(shè)置問題?
我正在用ABAQUS做一個撞擊的模型,那個撞擊的物體我想先給它一個豎直初速度,然后豎直方向被阻擋停止運動后,水平方向再有一個初速度繼續(xù)運動(不是邊界條件那里的勻速運動,是會被阻礙停止的),這樣的速度設(shè)置在預(yù)定義場里的初速度設(shè)置里的f(x)能實現(xiàn)嗎?或者還是在其他地方設(shè)置?我查了用戶手冊,有歐拉元素是不支持導(dǎo)入intial state的,所以這種方法不太行,請大佬指個方向。
2255 1
在sky中的查理 ??? 3年前
模擬流體中的粒子運動時,選擇合適的公式以提升計算效率 
示例:小球形粒子的重力沉降 以一個小的球形粒子為例,當它掉落在一個以速度 u (SI 單位:m/s)勻速流動的流體中時,遵循牛頓第二運動定律 (1) 其中, m_p(SI 單位:kg)是粒子的質(zhì)量 q(SI 單位:m)是粒子的位置矢量 F_t(SI 單位:N)是作用在粒子上的凈力或總力
3659 7
學(xué)時習(xí) ??? 2年前
機械設(shè)計常用計算公式錦集 
2、伺服電機:伺服電機驅(qū)動滾珠絲杠: 電機輸出轉(zhuǎn)矩=勻速運動時的驅(qū)動轉(zhuǎn)矩+預(yù)壓引起的摩擦轉(zhuǎn)矩+加速運動時的加速轉(zhuǎn)矩; (1)勻速動時的驅(qū)動轉(zhuǎn)矩: 勻速運動時的驅(qū)動轉(zhuǎn)矩(N*cm)=勻速運動時的外部載荷(N)x 絲桿導(dǎo)程(cm)/(2x 絲桿效率 x3.14); 注:絲桿效率一般取 0.9;(2)預(yù)壓引起的摩擦轉(zhuǎn)矩: 預(yù)壓引起的摩擦轉(zhuǎn)矩(N*cm)=內(nèi)部摩擦系數(shù)
3641
工廠物流自動化 ??? 4年前
離散剛體是否需要添加質(zhì)量和慣性矩?
顯示動力學(xué)溫度位移耦合分析,中間的攪拌頭是離散剛體,上表面添加了參考點,定義了向下的勻速運動和繞著軸心的勻速轉(zhuǎn)動。是否要添加質(zhì)量和慣性矩?
2473 3 2
一蜘蛛 ??? 3年前
機械設(shè)計常用計算公式錦集 
2、伺服電機:伺服電機驅(qū)動滾珠絲杠:電機輸出轉(zhuǎn)矩=勻速運動時的驅(qū)動轉(zhuǎn)矩+預(yù)壓引起的摩擦轉(zhuǎn)矩+加速運動時的加速轉(zhuǎn)矩;(1)勻速動時的驅(qū)動轉(zhuǎn)矩:勻速運動時的驅(qū)動轉(zhuǎn)矩(N*cm)=勻速運動時的外部載荷(N)x 絲桿導(dǎo)程(cm)/(2x 絲桿效率 x3.14);注:絲桿效率一般取 0.9;(2)預(yù)壓引起的摩擦轉(zhuǎn)矩:預(yù)壓引起的摩擦轉(zhuǎn)矩(N*cm)=內(nèi)部摩擦系數(shù)
3290 1
工廠物流自動化 ??? 4年前
關(guān)于我使用ABAQUS計算地震響應(yīng)結(jié)果結(jié)構(gòu)蹦迪跑了這件事?
各位大神: 我想問一下,一般在ABAQUS中進行地震分析時會將底部約束在隱式動力分析步中釋放掉一個方向的平動約束,但如此操作之后,我在一個很簡單的算例中發(fā)現(xiàn),如果將分析步時長設(shè)置的比地震持時更長一些的話,結(jié)構(gòu)將在地震加速度施加結(jié)束后處于一個長期的“0加速度勻速運動狀態(tài)”,我在一個簡單的板的計算案例里面也復(fù)現(xiàn)了這個問題,想咨詢一下,如何對結(jié)構(gòu)施加加速度的同時能讓其在地震結(jié)束后逐漸停止達到和實際符合的狀態(tài)呢
2529 8 1
高山俊男 ??? 1年前
關(guān)于Adams Car中3D路面建模的整車仿真問題
我準備用整車仿真里面的勻速運動先試試,但車怎么也跑不起來,彈框總是錯誤,有沒有專家能幫忙解決這個問題啊!
2291 1 1 1
胡焱輝 ??? 2年前
電動車動力總成振動噪聲的試驗研究 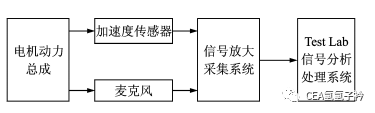
2.2 急加速工況2.2.1 階次跟蹤分析 旋轉(zhuǎn)運動機械的升降速過程的振動噪聲信號為非平穩(wěn)信號,不滿足傅里葉變換對信號的平穩(wěn)性要求,若直接用傳統(tǒng)傅里葉變換進行頻譜分析,則會產(chǎn)生“頻率模糊”現(xiàn)象。階次跟蹤是用于分析旋轉(zhuǎn)運動部件故障的重要方法,用等角度間隔采樣將非平穩(wěn)信號轉(zhuǎn)化為不受其影響的平穩(wěn)信號,結(jié)合傳統(tǒng)頻譜分析對系統(tǒng)進行振動和噪聲信號的分析。
2607 2
聲學(xué)工程師小吳 ??? 2年前
高階自動換道系統(tǒng)的設(shè)計方法 
對于高速自動換道來說,由于換道行為受到導(dǎo)航路徑規(guī)劃、道路條件、天氣情況、交通規(guī)則以及周圍交通車輛的運動狀態(tài)等因素的影響,會區(qū)分兩種換道動機和結(jié)果:其一是任意性換道,其二是強制性換道兩大類。其中,任意性換道是指從駕駛舒適性和效率上,為了追求更快的車速和更自由的行駛空間而進行換道的行為,其特點是該行為不是必須進行的。
2463
駕駛哥 ??? 4年前
2024年RecurDyn優(yōu)秀案例競賽作品分享:核探測機器人底盤設(shè)計與越障性能仿真驗證 
首先是對機器人進行直線行駛性能仿真分析,由于機器人直線行駛過程中無明顯速度變化,因此機器人采用的驅(qū)動函數(shù)為: HAVSIN(TIME,0.2,0,0.5,0.95*pi) 機器人在0.2-0.5秒之間速度由0增至0.95pi,隨后進行勻速運動,仿真時間設(shè)為30秒,步長設(shè)為300。
2556
杭州擬創(chuàng)(RecurDyn原廠) ??? 1年前
軸承與軸承室以及軸的配合計算(上) 
當軸承勻速旋轉(zhuǎn)時,情況就不太一樣。我們在下篇跟大家再繼續(xù)討論。
3011 1 2
軸承問題終結(jié)者 ??? 3年前
基于Adams剛?cè)狁詈戏抡娣治黾皯?yīng)用 
在上升運動時,首先在1s時間內(nèi)框架由靜止加速至10m/min,然后勻速運動保持26s,最后在1s時間內(nèi)由10m/min減速至0,此時剪式框架總行程為4.5m,運行結(jié)束為全收縮姿態(tài);在下降運動時,先在1s時間內(nèi)框架由靜止反向加速至10m/min,然后保持勻速運動26s,最后在1s時間內(nèi)由10m/min減速至0,此時剪式框架又回到全伸展姿態(tài)。整個升降過程運行總時間為56s。
3397 6 2
天佑有限元 ??? 4年前
adams_car_matlab_整車模型_平順性路面_聯(lián)合仿真_半主動控制力 

本課程與一般論文里的半懸架聯(lián)合仿真不同,以B級路面勻速工況為例, 詳細教授了整車模型在勻速直線運動時的減振器半主動控制力與matlab simulink的聯(lián)合仿真。并解決了直接使用仿真結(jié)果.m文件時 simulink里面output項包括testrig下默認參數(shù)的30余項output接口,我們只需要保留使用懸架動撓度,車身垂向加速度,車身垂向速度,懸架兩端相對速度接口。
2186 11
東邪不邪 ??? 4年前
沒有大海也能沖浪-帶你學(xué)習(xí)尾波沖浪 
加速、減速或者想勻速運動,都可以通過調(diào)節(jié)沖擊力實現(xiàn)。怎么調(diào)呢?很簡單,就是靠調(diào)節(jié)身體重心,進而調(diào)整沖浪板的傾斜角度。如圖,向前調(diào)整重心,沖浪板會向順時針方向傾斜,水提供的沖擊力會減小,那么沖浪板會在重力作用下沿著斜面加速,向前運動。反之,當你發(fā)現(xiàn)離船太近時,可以向后調(diào)整重心讓沖浪板向逆時針方向傾斜,增大水的沖擊力,減速運動。
3504 13 3
朦朦站起來 ??? 1年前
基于整車工況的電動汽車動力總成系統(tǒng)效率優(yōu)化設(shè)計方法 
考慮到整個NEDC 工況,勻速點只有6個點,而勻速點對應(yīng)的轉(zhuǎn)矩值又相對較小,為進一步精確分析能耗的分布,將區(qū)間進一步簡化,將6個勻速點獨立出來,將車速平均分為10個區(qū)間,能耗占比見表3。
3456 1
EDC電驅(qū)未來 ??? 4年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
