



振動力學多自由度系統問題選題?
具體要求: (1)所研究結構為實際工程或生產生活中的真實結構,分析時可對結構進行一定程度簡化,但不應過分簡化,不能作為單自由度系統,若為多自由度系統,其自由度數不少于5. (2)研究內容參考《振動力學》課程內容展開,可以包含但不限干,不同研究方法的對比,對結構動力響應的參數影響研究,針對結構動力響應的結構優化設計,結構動力特性影響機理分析等。
3894 1 1
阿薩姆拌啤酒?? ??? 2年前
【JY】基于Matlab的(單)多自由度動力學代碼分享 
寫在前文多自由度分析是現代工程和科學研究中不可或缺的一部分。它涉及到對復雜系統的動力學行為進行精確描述和預測。分享下多自由度的源代碼,僅供學習。
4296 12 2
建源之光 - 減隔震 ??? 2年前
Zemax案例 | 基于Zemax相機多自由度主動對準技術研究 
(3)傳感器對準:多視場物理信息驅動的五自由度精調透鏡組固定后,傳感器對準本質是尋找多視場成像質量綜合理想的位姿平面。研究利用多視場離焦曲線的空間分布信息,建立傳感器傾斜與視場專屬焦移補償的等效模型,通過BFGS算法快速求解理想傾斜與偏心量,實現傳感器dx、dy、dz、tx、ty五自由度精調,完成全系統對準。
978
摩爾芯創 ??? 15天前
Adams模擬單自由度系統強迫振動 
其瞬態時的響應函數為: 總響應為: 通過matlab將總響應做關于x和t的圖形如下: 以相同的步長進行Adams仿真,得到結果如下所示(質心沿x方向的運動): 經過對比理論計算與Adams仿真一致,驗證了單自由度系統的強迫振動。
2756 1
擺渡人張 ??? 2年前
三自由度系統固有頻率及振型的求解 
求解三自由度系統固有頻率; 求解三自由度系統固有頻率對應的振型; 理解歸一化是如何實現的。
1961
刺殺泊松比 ??? 4年前
Cadence 推出 Fidelity CFD 軟件平臺,為多物理場系統仿真的性能和準確度開創新時代 
該求解器可提供高階數值格式、尺度解析仿真和大規模硬件加速功能,可助力提高仿真性能,在確保準確度的同時縮短研發周期。 基于從收購 NUMECA 和 Pointwise 中獲得的專業知識和技術以及積累的計算軟件專業知識,Fidelity CFD 將所有先進技術結合在一起,助力 CFD 工程師通過簡化的工作流程更好地仿真多物理場的系統性能。
2968
Cadence楷登 ??? 2年前
六自由度機械臂五次多項式軌跡規劃(Fivejtraj_Function自編寫函數) 
,定義插補次數n,根據驅動器支持的最大插補次數設定Time=[0,0,0,0,0,0;5,5,5,5,5,5;10,10,10,10,10,10];StopTime=Time(3,1);FixedStep=0.2;SimpleNum=0:FixedStep:StopTime;Cunt=length(SimpleNum);for i=1:n %% 求每個關節角的五次多項式插補軌跡點
2603
余俊煒 ??? 3年前
雙質量系統二自由度動力學建模及傳遞函數幅頻特性分析 

主要講解了1/4懸架二自由度動力學方程如何推導,如何用matlab代碼書寫方程以及如何求解車身位移與路面激勵的傳遞函數、幅頻特性曲線。保姆級教學了。。。隨后還會上傳狀態方程法建模以及Simulink的方法建模的方式。希望為大家學習提供幫助,如有不足,懇請指正啦
483 3
東邪不邪 ??? 3年前
淺析有限元分析中自由度的概念 
有限元分析中,自由度(Degree of Freedom,簡稱DOF)是指系統中可以獨立變化的參數或變量的數量。在有限元分析中,一個自由度通常對應一個未知數,例如位移、轉角、應力等。系統的總自由度數量等于所有節點的自由度數量之和。自由度的數量取決于問題的性質以及所采用的有限元模型。
2694
CAE知識手札 ??? 2年前
一期一會 | 運用先進仿真軟件設計自由曲面光學 
目前一些常用的自由曲面包括: XY多項式 Zernike多項式 Chebychev多項式 Q型自由曲面自由曲面透鏡的表面輪廓光學系統所使用的自由曲面類型,取決于系統的需求和最終應用。由于自由曲面透鏡表面輪廓中存在潛在的x和y變化,因此可以創建許多XY多項式。
2303
Ansys中國 ??? 1月前
無線自由:探索AGV無線充電技術的自由度優勢 
設計無線充電系統時,工作距離的設定是實現自由度的關鍵。選擇過遠的工作距離固然能提供更大的空間自由度,但同時也會令設備變得龐大且昂貴。在“夠用即好”的設計原則下,結合AGV的實際需求開發的無線充電方案將優化性價比,提供更為經濟高效的解決方案。 魯渝能源AGV無線充電系統,利用磁場耦合諧振原理,已實現了±10cm的偏移自由度,這一點相信可以滿足所有機器人。
2185
魯渝能源無線充電 ??? 2年前
基于Nastran軟件的飛行器舵系統模態研究 
舵系統工作模式是舵機將電能轉換為機械能產生直線運動,通過傳動機構帶動舵面偏轉。2 模態理論分析根據模態理論,通常將所研究的結構特征處理為質點、剛體及阻尼器構成的系統,并將其離散為有限多個相互彈性聯接的剛體。因此無限多自由度就變為有限多自由度系統。當滿足線性定常系統要求時,系統通用運動數學模型可表示為式中,M、C、K分別為質量、阻尼和剛度矩陣,X為結構振動位移向量。
4385 3 1
Whitney ??? 2年前
Zemax案例 | 基于自由曲面的高分辨率成像光譜儀設計 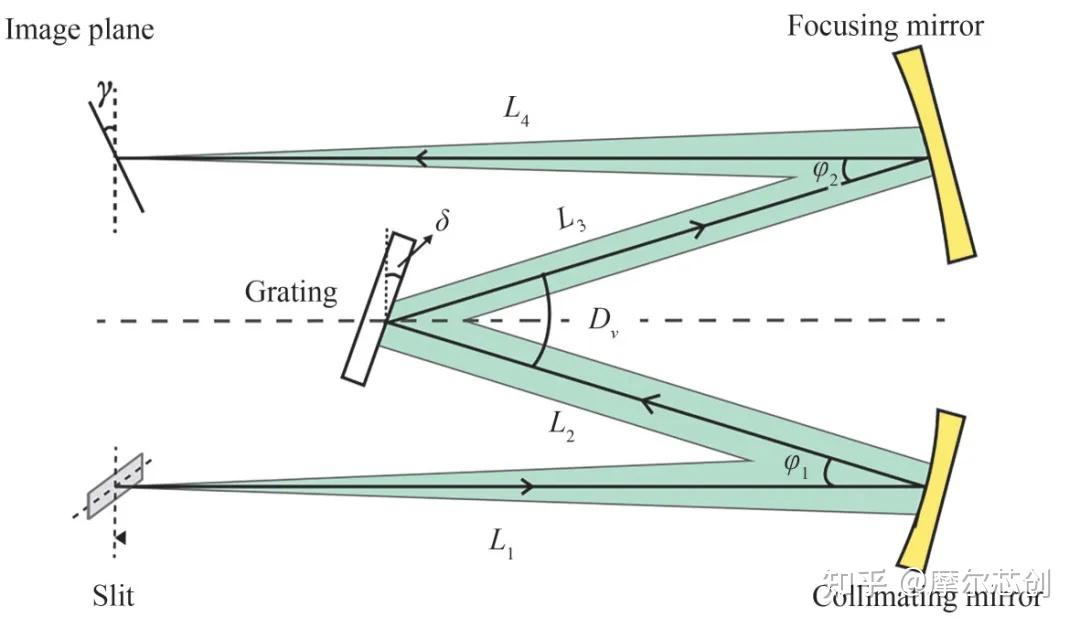
(2)成像性能:MTF接近衍射極限,對比度優異調制傳遞函數(MTF)是評價光學系統成像質量的核心指標,其值越接近1、下降越平緩,說明系統還原圖像細節與對比度的能力越強(最大參考頻率為CCD像元尺寸對應的31.25lp/mm)。
2291
摩爾芯創 ??? 4月前
為什么最好的機械臂是7個自由度而不是6個? 
因為自由度越多,機械手剛性越差。如果我們的胳膊有8個自由度,那么受傷的概率會更加很多。雖然沒有什么生物學研究證明這一點(世界上沒有8個自由度的生物軀體),但是機器人的研究是可以證明這個問題的。
2951
非標機械論壇 ??? 4年前
電動汽車電機總成懸置系統仿真分析及優化 
3 建立電機懸置系統仿真模型 電機懸置系統一共有沿 x、y、z 軸方向的平動和繞 x、y、z 方向的轉動 6 個自由度,因此系統存在 6 階固有頻率。利用多體動力學分析軟件 ADAMS 建立電機懸置系統的動力學模型,如圖 2 所示。利用 Vibration 模塊計算原系統的固有頻率和 解耦率,計算結果如表 2 所示。
3318 14 10
仿真客 ??? 3年前
STAR-CCM+系泊問題:漂浮式海洋牧場養殖裝置系泊系統設計 
而平臺在其他自由度的運動數值較小,這是由于浪向角在0°時,浪向與風流同向,對平臺縱蕩方向的影響較大。 作業工況下,純錨鏈系泊在各浪向角下的六自由度最大搖蕩的時歷曲線見圖8,系泊系統的最大張力時歷變化曲線見圖9。由圖8和圖9可知:純錨鏈系泊方案中,系泊錨鏈張力最大為665kN,最小安全系數為7.750,錨泊系統符合規范要求。
4348 1
仿真客 ??? 3年前
一文了解多體動力學仿真分析方法和應用領域 
適用于大規模自由度系統仿真分析,專門為剛體和柔體混合系統定制的稀疏矩陣求解器已驗證,可以很好地處理大規模自由度系統仿真分析 先進的3D面接觸算法,可以很好地支持3D面接觸,包括小面和NURBS兩種類型。
3819
Ansys中國 ??? 4年前
多學科統一的多體動力學建模方法 
1.廣義坐標與自由度 能夠描述動態系統的坐標可以很多,在一個系統中能夠唯一確定系統位姿或狀態的坐標稱為廣義坐標,同時一般描述系統的廣義坐標的個數等于系統的自由度。 在多學科耦合系統中,首先應該確定系統的廣義坐標和自由度。
3299 5 3
CAE仿真學習菌 ??? 2年前
Adams— 系統級多體動力學仿真平臺 
,通過與 MSC 合作開發硬件在環測試流程(HIL)實現了發動機和變速箱物理樣機與 Adams 實時模型的結合,實時模型源于現有的車輛模型,具有 150 個自由度,通過模型降階策略保留了原始模型的拓撲和參數。
2694 1
經緯恒潤 ??? 4年前
ANSYS AQWA系泊分析:漂浮式海洋牧場養殖裝置系泊系統設計
而平臺在其他自由度的運動數值較小,這是由于浪向角在0°時,浪向與風流同向,對平臺縱蕩方向的影響較大。 作業工況下,純錨鏈系泊在各浪向角下的六自由度最大搖蕩的時歷曲線見圖8,系泊系統的最大張力時歷變化曲線見圖9。由圖8和圖9可知:純錨鏈系泊方案中,系泊錨鏈張力最大為665kN,最小安全系數為7.750,錨泊系統符合規范要求。
3470 1 1
海上追風 ??? 3年前
20條/頁 
 271
271 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
