



hypermesh如何約束局部坐標系下的自由度 
面板analysis --system創建好局部坐標系,然后把需要添加約束的節點assign當前坐標系。坐標系的關聯方式有set reference和set displacement兩種,set reference是指定位置參考坐標系,節點坐標會轉變至參考坐標系下;set displacement是指定節點自由度坐標系,一般用于約束節點的自由度,節點坐標不變。
3695 4
略略略_7400 ??? 2年前
【JY】基于Matlab的(單)多自由度動力學代碼分享 
寫在前文多自由度分析是現代工程和科學研究中不可或缺的一部分。它涉及到對復雜系統的動力學行為進行精確描述和預測。分享下多自由度的源代碼,僅供學習。
4299 12 2
建源之光 - 減隔震 ??? 2年前
Zemax案例 | 基于Zemax相機多自由度主動對準技術研究 
(3)傳感器對準:多視場物理信息驅動的五自由度精調透鏡組固定后,傳感器對準本質是尋找多視場成像質量綜合理想的位姿平面。研究利用多視場離焦曲線的空間分布信息,建立傳感器傾斜與視場專屬焦移補償的等效模型,通過BFGS算法快速求解理想傾斜與偏心量,實現傳感器dx、dy、dz、tx、ty五自由度精調,完成全系統對準。
1004
摩爾芯創 ??? 15天前
振動力學多自由度系統問題選題?
具體要求: (1)所研究結構為實際工程或生產生活中的真實結構,分析時可對結構進行一定程度簡化,但不應過分簡化,不能作為單自由度系統,若為多自由度系統,其自由度數不少于5. (2)研究內容參考《振動力學》課程內容展開,可以包含但不限干,不同研究方法的對比,對結構動力響應的參數影響研究,針對結構動力響應的結構優化設計,結構動力特性影響機理分析等。
3896 1 1
阿薩姆拌啤酒?? ??? 2年前
ZEMAX軟件技術應用專題:如何為光學相干斷層掃描系統建模 
OpticStudio可以透過兩種方式定義寬帶光源:透過在適當範圍內定義多個系統波長,或者透過將關聯的相干長度定義為光源的屬性。相干性是OCT的必要來源屬性,因此我們將使用此方法並允許OpticStudio透過以下方式執行帶寬計算和採樣:物件設定顯示:醫療保健的美好未來我們很高興看到OCT系統在醫學領域的發展以及在未來幾年中將要出現的創新。
2223
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術應用專題:基於 Alvarez自由曲面透鏡的光學變焦 
沒有過度失真的可變焦距鏡頭被廣泛認為是非常理想和廣泛適用的,但儘管現有技術工作人員失敗了,Alvarez還是設法提出了可變焦距鏡頭和系統。他的專利 (US3507565A 21.04.1970) 早已過期,但 DynaOptics 繼續使用我們的自由曲面透鏡技術。什麼是Alvarez 變焦鏡頭人們可能知道傳統變焦鏡頭的工作原理。
2220
w**elab86_Swsp ??? 3年前
六自由度機械臂五次多項式軌跡規劃(Fivejtraj_Function自編寫函數) 
,定義插補次數n,根據驅動器支持的最大插補次數設定Time=[0,0,0,0,0,0;5,5,5,5,5,5;10,10,10,10,10,10];StopTime=Time(3,1);FixedStep=0.2;SimpleNum=0:FixedStep:StopTime;Cunt=length(SimpleNum);for i=1:n %% 求每個關節角的五次多項式插補軌跡點
2603
余俊煒 ??? 3年前
ZEMAX軟件技術應用專題:如何在OpticStudio中設計DOE透鏡或超穎透鏡 
繞射光學元件(DOE)和超表面/超穎透鏡在光學系統設計中越來越受歡迎,其應用範圍從手機鏡頭到AR / VR耳機,從3D傳感到照明。但是,對於包含 DOE 或超穎透鏡的系統進行模擬和設計總是很棘手的。沒有通用的方法可以處理所有情況。設計人員需要根據具體情況決定其系統的策略。
2189
w**elab86_Swsp ??? 3年前
三自由度機械臂運動學分析+仿真 
robot.teach; %畫出模型并進行調控 robot.display(); %顯示建立的機器人的DH參數 運行上述程序,即可得到機器人模型如圖 3-3 圖 33機器臂模型 運動空間分析 依據機器人三個自由度的運動范圍,采用三自由度機器人模型進行計算
3997
余俊煒 ??? 2年前
ZEMAX軟件技術應用專題:如何使用ZOS-API創建飛行時間用戶分析 
此模式不允許對當前鏡頭系統或使用者介面進行更改(即:在這種模式下只允許對系統的副本進行更改)。自訂分析可以用C++ (COM)或C# (.NET)編寫。本文的自訂分析是用C#編寫的。有關自訂分析的更多資訊,請點擊程式設計(Programming)選項卡>關於ZOS-API (About the ZOS-API) >自訂分析 (User Analysis),查看內置幫助檔。
2080
w**elab86_Swsp ??? 3年前
Ansys Zemax光學設計軟件技術教程:眼科鏡片設計 
但人眼系統具有相對較小的光瞳尺寸,因此在此類系統的設計上,一般會認為球差和彗差並不十分重要。同理,其餘的像差在此也可先行忽略。隨著自由曲面製程技術的演進,光學設計者得以摒除許多以往的限制條件。同時,OpticStudio具有優越的運算能力,可以進行規模較大的系統和更多影像參數的模擬。得益於此,眼科鏡片的設計可以有更進一步的改善,我們將在以下的文章中詳述。
2212
w**elab86_Swsp ??? 3年前
質量管理 | 功能尺寸和局部坐標系在eMMA軟件輔助車身裝配中的應用 
02在eMMA中的實現方式在eMMA Planner或Assembler模塊中,工程師可以基于實際裝配基準,輕松創建局部坐標系。最常用的方法是 “3-2-1”原則,即通過三個點確定主基準面(限制三個自由度),兩個點確定次基準軸(限制兩個自由度),一個點確定第三基準(限制最后一個自由度),從而完全限定零件的位置。
2164
海克斯康設計與仿真 ??? 6月前
ZEMAX軟件技術應用專題:在 OpticStudio 中模擬高階雷射光束 
存在依賴於給定係統對稱性的其他正交解集。1 它們可用於對高階光束模式進行建模。在這篇Blog中,我們描述了 OpticStudio 中可用於表徵高階雷射光束的模型。定義後,此類光束可以在 OpticStudio 中使用物理光學傳播設計的任何光學系統中傳播。
2057
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術應用專題:利用Kogelnik方法模擬體積全像光柵的繞射效率 
要了解有關如何在 OpticStudio 中應用該理論、如何設置序列和非序列系統以及下載範例系統的更多信息,您可以在此處取得本知識庫文章的全部內容。Ansys Zemax國內可靠代理商 光研科技南京有限公司是國內可靠的光學軟件和儀器光電供應商,提供企業定制化上門培訓服務,承接各類光學設計項目,并有一系列自主編寫出版的光學設計書籍。
2123
w**elab86_Swsp ??? 3年前
2000坐標系與現行坐標系的關系及采用2000坐標系之后的一些變化 
空間上相同經緯度坐標點在1954年北京坐標系、1980西安坐標系及2000國家大地坐標系下具有不同的大地平面坐標(統充一采用高斯投影6度分帶)。
2725
巖土聯盟 ??? 4年前
ZEMAX軟件應用專題:波前 (OPD) 怎麼算的 
然後可以看到系統自動加入兩個Coordinate Break以及相關設定,如下。最後在確保把Chief的長度設定到出瞳的Radius上。便可以看到系統現在如下。打開評價函數,重新輸入以下數值驗證。可以看到目前的最大視場 (Hy=1) 邊緣光線 (Py=-1) 的波前差等於3.555676,跟OPD Fan中的結果一致。
2516 1
w**elab86_Swsp ??? 3年前
為什么最好的機械臂是7個自由度而不是6個? 
因為自由度越多,機械手剛性越差。如果我們的胳膊有8個自由度,那么受傷的概率會更加很多。雖然沒有什么生物學研究證明這一點(世界上沒有8個自由度的生物軀體),但是機器人的研究是可以證明這個問題的。
2951
非標機械論壇 ??? 4年前
淺析有限元分析中自由度的概念 
一般來說,結構分析中每個節點通常有多個自由度,包括各個方向上的位移自由度(如x、y、z方向上的位移)、轉角自由度等。在二維問題中,每個節點通常有兩個位移自由度(x和y方向),而在三維問題中則有三個位移自由度(x、y、z方向)。一個連續體實際上有無窮多個自由度,有限元分析時將連續的無窮多個自由度問題離散成為離散的有限多個自由度的問題,此時,結構的自由度也就有限了。
2699
CAE知識手札 ??? 2年前
算例精選STAR-CCM+模擬船航行|DFBI:頂頭波中的船 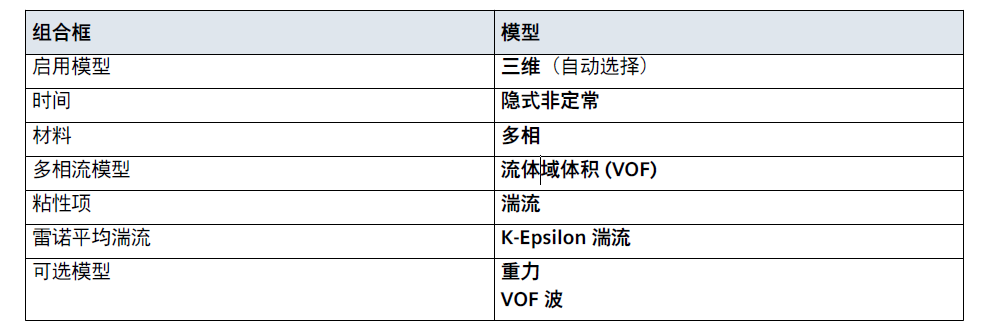
在區域上設置DFBI運動這一操作會讓對象樹上的DFBI管理器節點顯示出來,并將 6 自由度求解器和6自由度運動節點添加到求解器管理器。6.設置體初始坐標系6 自由度求解器必須知道體相對于基準坐標系的初始方向。因此,定義局部坐標系,其中的 X 軸與體的前向對齊,Z 軸與豎直方向對齊。要設置體初始坐標系:1. 確保幾何場景 1 已打開。2.
6238 4
仿真客 ??? 3年前
第七自由度及二階張量介紹 

θ′≠β′的物理來源第八自由度:截面畸變(箱形截面輪廓變形)與橫向雙力矩橫隔板/墜板加強體系:離散力法求解與連續化等效數學同構:隔板連續化方程與彈性地基梁方程的對比及邊界層衰減效應第三章 空間穩定、幾何剛度與有限元落地邏輯偏心荷載下的壓彎扭耦合與幾何剛度矩陣構建變系數特征值問題與 Galerkin 近似解法有限元軟件底層架構:7自由度單元的形函數基底與剪切自鎖假設
4
飯42 ??? 19天前
20條/頁 
 102
102 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
