



粒子群算法PSO與MATLAB程序視頻教程動態(tài)優(yōu)化及多目標(biāo)優(yōu)化 

主要內(nèi)容包括:粒子群算法(PSO)基本概念與算法流程,粒子群算法利用MATLAB程序分析數(shù)模信號,粒子群算法6個構(gòu)成要素及其選擇經(jīng)驗(yàn),慣性權(quán)重改進(jìn)方法及3個PSO算法對比分析,測試函數(shù)分析粒子群算法的搜索性能,粒子群算法應(yīng)用及存在問題與研究熱點(diǎn),離散粒子群算法與離散二進(jìn)制版粒子群算法,有約束動態(tài)慣性權(quán)重的BPSO算法分析背包問題,基于交叉變異的混合粒子群算法分析旅行商問題,基于交換序的粒子群算法再求解旅行商優(yōu)化問題
910 1 10
鄭一 ??? 7年前
149基于matlab的A星算法和PSO算法實(shí)現(xiàn)路徑規(guī)劃動畫演示 
基于matlab的A星算法和PSO算法實(shí)現(xiàn)路徑規(guī)劃動畫演示,具有GUI界面,可自主生成障礙物。移動靶路徑規(guī)劃。程序已調(diào)通,可直接運(yùn)行。
2008
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
1-63基于matlab的生物地理的優(yōu)化器(BBO)被用作多層感知器(MLP)的訓(xùn)練器。粒子群優(yōu)化(PSO)、蟻群優(yōu)化(ACO)、遺傳算法(GA)、進(jìn)化策略(ES)和基于概率的增量學(xué)習(xí)(PBIL) 
基于matlab的生物地理的優(yōu)化器(BBO)被用作多層感知器(MLP)的訓(xùn)練器。粒子群優(yōu)化(PSO)、蟻群優(yōu)化(ACO)、遺傳算法(GA)、進(jìn)化策略(ES)和基于概率的增量學(xué)習(xí)(PBIL)。計(jì)算了BBO-MLP、PSO、ACO、ES、GA和PBIL的分類精度并相互比較。輸出每種算法的收斂曲線和分類精度。程序已調(diào)通,可直接運(yùn)行。購買后可下載視頻中的源程序文件。
259
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
Lumerical案例 | 基于粒子群優(yōu)化的雙波段MIM濾波器引領(lǐng)高靈敏度檢測革新 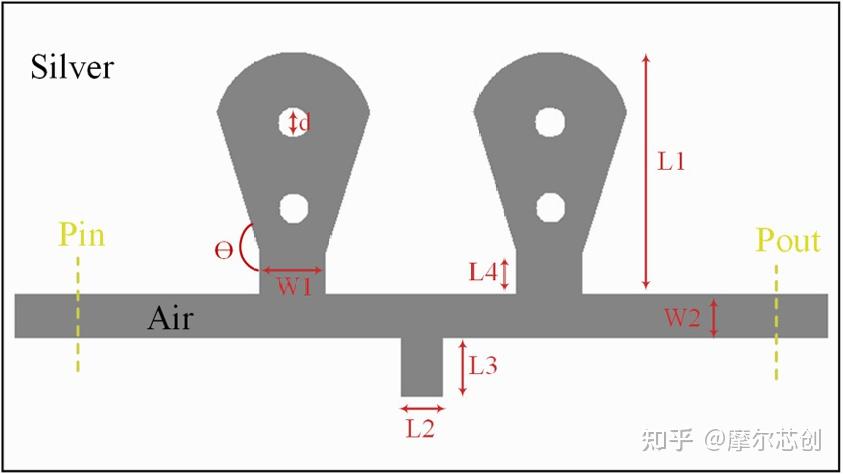
圖2 PSO算法設(shè)計(jì)MIM濾波器的工作流程首先在MATLAB中初始化PSO參數(shù)與粒子位置;每個粒子對應(yīng)的尺寸參數(shù)輸入Lumerical FDTD進(jìn)行仿真,計(jì)算傳輸譜;MATLAB評估目標(biāo)函數(shù),更新粒子的局部最佳位置( )和群體的全局最優(yōu)位置( );重復(fù)迭代直至收斂。
2489
摩爾芯創(chuàng) ??? 4月前
63基于matlab的生物地理的優(yōu)化器(BBO)被用作多層感知器(MLP)的訓(xùn)練器。 
基于matlab的生物地理的優(yōu)化器(BBO)被用作多層感知器(MLP)的訓(xùn)練器。粒子群優(yōu)化(PSO)、蟻群優(yōu)化(ACO)、遺傳算法(GA)、進(jìn)化策略(ES)和基于概率的增量學(xué)習(xí)(PBIL)。計(jì)算了BBO-MLP、PSO、ACO、ES、GA和PBIL的分類精度并相互比較。輸出每種算法的收斂曲線和分類精度。程序已調(diào)通,可直接運(yùn)行。
2009
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
基于PSO優(yōu)化LSSVM的時序預(yù)測MATLAB實(shí)戰(zhàn) 
今天給大家分享PSO優(yōu)化LSSVM的時序預(yù)測代碼實(shí)戰(zhàn),主要從算法原理和代碼實(shí)戰(zhàn)展開。
2109 1
Matlab心得交流 ??? 2年前
Zemax案例 | 基于Zemax實(shí)現(xiàn)AR波導(dǎo)全視野高均勻性設(shè)計(jì)方案 
:可與Lighttools、Rsoft、Matlab等軟件無縫銜接,實(shí)現(xiàn)“光柵設(shè)計(jì)-系統(tǒng)仿真-算法優(yōu)化”的一體化流程,適配前沿光學(xué)研究的復(fù)雜需求。
901
摩爾芯創(chuàng) ??? 28天前
1-106基于matlab的粒子群算法與 Simulink 模型之間連接的橋梁是粒子(即PID控制器參數(shù))和該粒子對應(yīng)的適應(yīng)值(即控制系統(tǒng)的性能指標(biāo)) 
基于matlab的粒子群算法與 Simulink 模型之間連接的橋梁是粒子(即 PID 控制器參數(shù))和該粒子對應(yīng)的適應(yīng)值(即控制系統(tǒng)的性能指標(biāo))。
401
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
1-35基于matlab的多尺度排列熵(MPE)模型 
基于matlab的多尺度排列熵(MPE)模型,首先通過對多尺度排列熵算法的參數(shù)時間序列長度 N、嵌入維數(shù) m、延遲時間 t 和尺度因子 s 進(jìn)行研究,得出對其參數(shù)優(yōu)化的必要性。進(jìn)而在綜合考慮參數(shù)影響的基礎(chǔ)上,以多尺度排列熵的偏度構(gòu)造目標(biāo)函數(shù),利用粒子群優(yōu)化算法(PSO)對多尺度排列熵算法(MPE)的參數(shù)進(jìn)行尋優(yōu),得到最優(yōu)參數(shù)。程序已調(diào)試通過,可直接運(yùn)行。購買后可下載視頻中的源程序文件。
241
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
飛行器系統(tǒng)仿真與驗(yàn)證 
由于姿態(tài)算法和濾波算法對于慣性導(dǎo)航系統(tǒng)的精度至關(guān)重要,因此國內(nèi)外研究者先后發(fā)展了多種算法,如基于標(biāo)準(zhǔn)Kalman濾波發(fā)展起來的偏差分離濾波方法、自適應(yīng)濾波、H∞濾波方法和魯棒Kalman濾波方法等。對于這些姿態(tài)算法、濾波算法和控制算法,可以基于Simcenter Amesim的信號控制庫或Matlab/Simulink的控制工具箱結(jié)合S函數(shù)進(jìn)行建模。
3814 2 1
航發(fā)設(shè)計(jì) ??? 3年前
1-109基于MATLAB 中的設(shè)施布局設(shè)計(jì)和位置分配 
基于MATLAB 中的設(shè)施布局設(shè)計(jì)和位置分配,通過PSO算法進(jìn)行最佳位置匹配。程序已調(diào)通,可直接運(yùn)行。購買后可下載視頻中的源程序文件。
218
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
基于Matlab的纖維圖像特征提取與自動分類程序?qū)崿F(xiàn) 
圖2 圖像分類方法流程圖實(shí)驗(yàn)結(jié)果筆者基于上述的方法編寫了MATLB代碼,搭建了App Designer GUI軟件界面,能夠快速地實(shí)現(xiàn)纖維圖像提取與自動分類。讀取纖維圖片,自動輸入纖維種類,顯示纖維圖像,經(jīng)過灰度處理,再通過二值化+細(xì)化,利用Harris角點(diǎn)檢測算法進(jìn)行特征點(diǎn)提取,進(jìn)行匹配相似性計(jì)算,從而最終輸入分類結(jié)果,顯示纖維種類。
2686 2 1
320科技工作室 ??? 1年前
純電動汽車傳動系統(tǒng)參數(shù)匹配及優(yōu)化 
由于目標(biāo)問題存在著眾多的局部極值,當(dāng)面對復(fù)雜的優(yōu)化問題,尤其是多峰、多極值的模態(tài)函數(shù)優(yōu)化問題時,目前已有的全局優(yōu)化算法不可避免地存在著早熟、收斂速度慢等缺陷。SOA 算法對齒輪減速器進(jìn)行優(yōu)化設(shè)計(jì),在同 PSO、GA 算法和傳統(tǒng)設(shè)計(jì)方法的結(jié)果進(jìn)行對比分析,優(yōu)化結(jié)果表明,SOA 算法具有更快的收斂速度和更高的收斂精度。
3066
EDC電驅(qū)未來 ??? 4年前
汽車工程Matlab/Simulink 
01:Matlab_Simulink在汽車軟件開發(fā)中的應(yīng)用02:MatlabSimulink開發(fā)自動駕駛功能的實(shí)例研究03:快速搭建新能源汽車整車模型及性能優(yōu)化04:整車系統(tǒng)建模和優(yōu)化 - MATLAB & Simulink05:Matlab_Simulink電機(jī)控制軟件算法開發(fā)
4049
Jack Chen ??? 4年前
Isight教程系列1|Isight集成MATLAB聯(lián)合優(yōu)化仿真 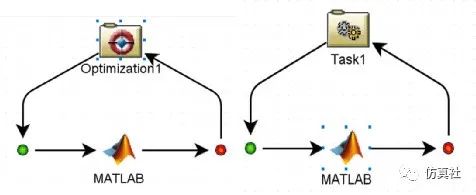
圖6配置MATLAB啟動執(zhí)行程序位置5.Optimaztion模塊優(yōu)化設(shè)置圖7 優(yōu)化模塊設(shè)置圖8為優(yōu)化迭代過程圖,其最優(yōu)值為5.1302,而理論值通過公式可計(jì)算出為5.1302,這說明通過優(yōu)化算法獲得的解和理論解是一樣的。圖8優(yōu)化流程3.制作模板文件導(dǎo)入變量在第2節(jié)中,變量是手動建立的,這對設(shè)置多個變量不太友好,在Isight中能否批量產(chǎn)生變量呢?
5303 14 3
仿真客 ??? 3年前
【技術(shù)貼】AVL電動車能量管理仿真解決方案 
圖9為基于Model CONNECT所搭建的電動車能量管理系統(tǒng)模型,其中動力傳動系統(tǒng)基于AVL CRUISE軟件搭建,其他系統(tǒng)均基于AVL CRUISE M所搭建。對于廣大用戶來講,完全可以基于公司各部門的實(shí)際情況集成諸如GT-Suite,Kuli,F(xiàn)lowmaster,Matlab,AMESim等所搭建的熱管理子系統(tǒng)模型及控制策略。近年來,我們也成功支持不同的用戶開展過類似的工作。
3903 3 3
AVL先進(jìn)模擬技術(shù) ??? 3年前
基于MATLAB的直接序列擴(kuò)頻通信系統(tǒng)的仿真模型 
接著利用MATLAB完成各子系統(tǒng)仿真模型的搭建,運(yùn)行仿真系統(tǒng)判斷是否成功,對運(yùn)行結(jié)果進(jìn)行分析,對各項(xiàng)參數(shù)和指標(biāo)進(jìn)行評估,以判斷系統(tǒng)是否符合要求,如果是,表明仿真成功;否則需要修改參數(shù)重新運(yùn)行系統(tǒng)。
4906 3 1
Matlab心得交流 ??? 2年前
轉(zhuǎn)崗自動駕駛控制算法最強(qiáng)路徑來啦! 
本次汽車學(xué)堂面向控制算法開發(fā),推出了自動駕駛控制算法(三階)訓(xùn)練營,通過三個階段的系統(tǒng)學(xué)習(xí),從經(jīng)典控制到現(xiàn)代控制,從理論到實(shí)踐,旨在幫助學(xué)員提升控制算法底層基礎(chǔ),在實(shí)踐項(xiàng)目中積累工程能力。
1987
木火柴 ??? 4年前
孟錦豪等:基于NSGA-II遺傳算法的鋰電池均衡指標(biāo)優(yōu)化 
3 鋰電池均衡指標(biāo)的優(yōu)化及決策結(jié)果分析 利用MATLAB/Simulink仿真實(shí)驗(yàn)平臺搭建由6塊額定容量為1500 mAh、額定電壓為3.60 V的磷酸鐵鋰電池單體組成的可重構(gòu)兩開關(guān)均衡系統(tǒng),并應(yīng)用NSGA-II算法對該均衡系統(tǒng)進(jìn)行優(yōu)化。
5055 4 2
能源阿陽 ??? 2年前
無人潛水艇的設(shè)計(jì)與仿真 
一方面需要成熟的路徑規(guī)劃算法,靈巧的操作和避障能力,可以按照既定的路線自主航行躲避障礙,另一方面需要遠(yuǎn)距離水下數(shù)據(jù)采集和通訊能力,確保作業(yè)任務(wù)的質(zhì)量。 在這一領(lǐng)域,借助 MATLAB 和 Simulink 強(qiáng)大的物理建模和仿真能力,可以為您的船舶設(shè)計(jì),系統(tǒng)設(shè)計(jì)和人工智能開發(fā)大幅提高效率。
3907 4 2
海工 ??? 4年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
