



半軸精車、鉆孔、孔倒角自動化設計 
圖6 發那科R-2000iC機器人 ⑵機械手爪:機器人手爪為2套相同手爪并列布局,實現上下料切換,如圖7所示。手爪為氣動結構,手指為仿形設計,可穩定抓取工件桿部。本方案手爪采用杠桿原理,配置缸徑 φ160mm氣缸,通過拉緊松開杠桿,實現手爪開合抓取工件動作,抓取范圍直徑 φ45~ φ65mm。
2377
FMMM ??? 4年前
自動智能裝配技術在汽車焊裝車間的研究與應用 
然后通過此車身測點的位置來調整機器人抓手傳感器的位置。依次調整機器人抓手的示教位、安裝位以及最后的測量位,最后通過若干輪次的MFU(即設備重復性能力)驗證完成調試。通過尺寸與節拍的不斷優化,最終將自動智能裝配技術成功應用于GLC級/E級裝配線,不僅實現了裝配線產能的提升,還保持了裝配質量的穩定性。
4963
汽車-小江 ??? 2年前
靈巧手CNC機加工:人形機器人具身智能的關鍵零部件制造方案 
一、靈巧手與人形機器人發展的緊密關系靈巧手是指具備高自由度(Degrees of Freedom, DOF)的末端執行器,能夠完成精細的操作,例如抓取易碎物體、進行復雜的裝配動作,甚至模擬人類手部的靈活性。相比傳統的機械夾爪,全驅動靈巧手在關節控制、抓取方式和反饋機制上更接近人類手掌。在人形機器人靈巧手的研發過程中,自由度的提升意味著更復雜的機械結構與更高精度的加工要求。
2632
2103707493 ??? 9月前
【機械原理】十二種夾取機構,給你的設計來一點新思路 
011 11、齒輪拾取機構 換個角度看看: 紫色線是抓手的軌跡,這里使用兩個對稱夾具。
2395
機械工程師 ??? 4年前
物流機器人「手太重」?HBK六維力傳感器如何「溫柔拿捏」 
傳感器的研發過程圍繞多項高要求的約束條件展開,包括抓手內部空間有限、需實現實時力反饋,以及要在復雜倉庫環境中穩定運行。 最終成型的是一款帶集成式數字放大器的超緊湊型傳感器,能夠以多軸精度同步輸出力與扭矩數據(Fx、Fy、Fz、Mx、My、 Mz),且延遲僅為毫秒級。
1811
HBK測試與測量 ??? 5月前
淺談太空“機械臂” 
國際空間站上的機械臂抓取龍貨運飛船據美媒報道,美國正在推進的月球門戶站項目,加拿大將為它研制第三代機械臂——加拿大臂3。這種機械臂仍然包括大臂和機器手兩個部分,但應用了更先進的機器視覺、簡短的軟件和人工智能系統,可以在無需航天員遙控干預的情況下執行任務。
2120
機械設計師 ??? 4年前
《基于 ABAQUS 的大跨距桁架不同截面模態分析和結構優化》 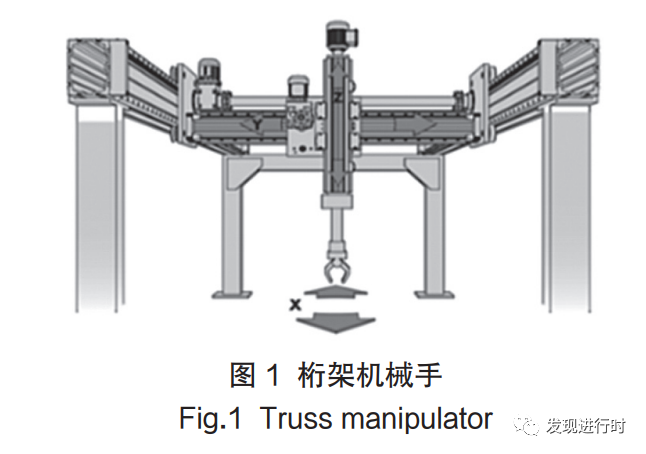
[ 關鍵詞 ] ABAQUS;結構優化;模態分析;振動;桁架機械手0 引言 桁架機械手是一種建立在直角 X,Y,Z 三 坐標系統基礎上 [1],可以調整零件位置,或者實 現零件的軌跡運動等功能的全自動工業設備 [2]。大部分桁架機械手由直線運動模塊組成 [3-4]。本 文針對江西贛州某自動化加工鐘表企業,實現自 動抓取加工表殼功能,設計出一款適用于多臺 CNC 車床的大跨距桁架機械手。
3166 2
CAEer吳皓 ??? 2年前
汽車沖壓自動化生產線規劃及注意事項 
如果料垛不夠整齊,會造成磁力分張效果差(易產生雙料現象),拆垛手抓取板料位置不夠準確等問題。因此,自動線投入之前,為保證生產效率達到目標值,必須明確對鋼板料垛的要求。
5025
金屬加工前沿 ??? 2年前
傳統測試設備的局限與協作機械臂的破局 
它本質上是一個可自由編程、具備感知能力的“萬能操作手”,通過更換末端執行器(EOAT)和集成不同的測控儀器,它可以執行多種多樣的測試任務,將測試設備從“固定工裝”升級為“柔性工作站”。二、 協作機械臂構成的核心測試單元與能力一個以協作機械臂為核心的智能測試系統,通常由以下幾部分構成:1.協作機械臂本體:作為執行機構,負責移動、定位和操作。
2821 1 1
德基西瓜 ??? 7月前
abaqus硅橡膠分析錯誤,求大神幫助,感謝
這是一個柔性機械手抓,在一側同期可以進行彎曲從而抓取,想用硅橡膠這種材料進行,在做硅橡膠這種材料分析的時候,錯誤為 The initial bulk modulus of 2.01037e+08 exceeds 100 times the initial shear modulus of 3.77697e+05 (the initial poisson ratio 0.49906 exceeds
2973 3 2
Villain?angel ??? 2年前
【5/9更新】無所不能的工業機器人,30張動圖看個夠 
把次品投出 噴涂機器人 六軸機械手 抓取機械手 切香腸
1953 1 2
技術鄰CAD學習 ??? 4年前
什么是世界模型?有什么用? 
當看到的對象是水杯時,它知道抓取力量應該大點,而對象是人手時,力度就要減小。 工業機器人,一個會打螺絲的世界模型。看到傳送帶不同的零件,它知道應該把它裝在哪,用多大的力。理論上來說,世界模型的訓練素材來自哪些場景,它最終的應用就有哪些,而且還會更廣泛。中國也會成為世界模型的練兵場,畢竟中國的制造業總產值占全球的30%以上,2024年工業機器人安裝量也占到全球的54%。
1934
天洑軟件 ??? 4月前
與全球頂尖科技共赴智能時代之約:2026深圳國際人工智能展會 
在特設的“具身智能演練場”,觀眾將親眼目睹人形機器人的全能力矩陣——從雙足穩健奔跑、靈巧抓取重物,到四足仿生機器人穿越復雜地形,再到仿生靈巧手精準復刻人類手勢,直觀感受具身智能從實驗室走向產業化的“奇點時刻”。
1087
數字中國產業展會 ??? 2月前
慧眼識珠:機器視覺技術的工業應用與廠商巡禮 
如果發現PCB存在缺陷,則經過數字IO卡向PLC發出一個信號,通知它控制機械手拿出該PCB。此時PLC會綜合輔助定位傳感器,檢查PCB的位置,控制機械手準確抓取缺陷PCB,從而達到分揀目的。
4228 4 1
機械發明愛好者 ??? 3年前
接頭鍛造自動化生產線簡介 
圖3 彎道 ⑶自動線機器人的抓手要根據產品形狀設計,合理抓取。 ⑷產品在各個工序的狀態要穩定,如預鍛和終鍛上下模都要設計頂料機構,下面的頂料機構一般可以使用原來設備下面配置的頂出缸,而上面就要在上模座上增加頂出缸,以實現上模頂出,當然頂出系統要穩定,該模具頂桿的頂出靠液壓系統,而退回是用壓縮彈簧。
2435
FMMM ??? 4年前
哪里可以獲取提升閥的技術文檔? 
技術文章與應用案例:除了標準文檔,我們的官網還定期發布深度的技術文章和行業應用案例,例如您可以了解到提升閥在高速包裝、機器人抓取、醫療設備等不同場景下的選型要點、性能優勢以及故障排查技巧,這些內容能幫助您更詳細地理解產品,優化系統設計。
917
埃邁諾冠氣動器材(上海)有限公司 ??? 1月前
多工位自動化點焊技術的研究與應用 
上料需將零件擺放在固定工裝內,通過上料機器人示教,實現零件的抓取上料;而工業機器人點焊則是在機械手末端安裝好點焊工具,通過PLC 對點焊工具及工業機器人動作信號進行交互控制,由于涉及到12 個點位的焊接,為提高工作效率,采用兩臺工業機器人配合作業,通過對工業機器人進行TCP 設定,完成固定點位的示教動作,特別注意避開動作干擾時空,最終實現相應點位的點焊動作,如圖2 所示。
2812 1
FMMM ??? 4年前
增強現實場景下基于穩態視覺誘發電位的機械臂控制系統 
3.2在線試驗 在線試驗要求受試者佩戴AR眼鏡,通過抓取黑色小球并將其放置在工作區域完成拼圖任務。在線試驗中沒有視覺提示,小球放置的位置并不固定,由受試者自行選擇。當受試者確定小球放置位置后,自行切換刺激界面,受試者選擇目標放置位置的坐標(行坐標和列坐標)。然后,機械臂到指定位置抓取小球,并將小球根據選擇結果移動到目標位置。
2578 1
機械設計師 ??? 4年前
測試文章111111 
</p><p>抓取競品假期爆款文案、行業熱點數據,整理成規范報表交付,<strong>一單客單價就有200-800</strong>;</p><p>復雜一點的企業定制單,<strong>報價幾K不等</strong>。
1165
冰紅茶代言人2號 ??? 20天前
2026北京人工智能展會:大模型賦能機器人,開啟智能產業新周期 
其中,大模型核心技術展區聚焦多模態大模型、輕量化部署、訓練數據治理等核心領域,集中展示可獨立復核的技術指標與創新成果,涵蓋推理延遲、準確率、能耗等關鍵參數,直觀呈現大模型在環境感知、復雜推理上的突破;具身智能機器人展區則匯聚人形機器人、四足機器人、智能巡檢機器人等各類產品,既有像Galbot那樣可實現透明物體精準抓取、24小時無人值守運營的前沿機型,也有應用于工業巡檢、醫療服務、公共服務等場景的成熟解決方案
1169
數字中國產業展會 ??? 2月前
20條/頁 
跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
