



北理工研制機械狗全地形自適應(yīng),無需額外視覺感知,可在復(fù)雜地形中如履平地 
▍四足機械狗的誕生三部曲 1、四足機械狗誕生的第一步:考慮什么樣的腿結(jié)構(gòu)能讓機械狗走得穩(wěn) 動態(tài)運動初步由地面反作用力(GRF)決定,可以通過腿結(jié)構(gòu)和執(zhí)行器來表征,研究人員對不同的腿結(jié)構(gòu)進行了數(shù)值模擬,采用了能夠產(chǎn)生更大的地面反作用力(GRF)的對稱并聯(lián)腿結(jié)構(gòu)。
3179
無人機10086 ??? 4年前
智能眼鏡交互測試全解:觸控 / 按鍵 / 壓感響應(yīng)速度與準(zhǔn)確率,如何選對測試工具? 
1、觸控 / 壓感綜合測試設(shè)備: 核心能力: 六自由度機械臂,模擬手指精準(zhǔn)點擊、滑動、按壓 壓力閉環(huán)控制:0.05–10N 連續(xù)可調(diào),精度 ±0.01N同步測量:延遲(±0.1ms)、坐標(biāo)偏差(±0.05mm)、壓感線性度適配曲面鏡腿、小尺寸觸控區(qū),支持邊緣、角落全覆蓋測試2、按鍵壽命與力特性測試儀設(shè)備:按鍵荷重曲線儀、耐久測試機測試項:按壓力 - 行程曲線、觸發(fā)點、回彈力、10
1242
德基西瓜 ??? 1月前
可靠性測試裝備為仿生機器人未來發(fā)展賦能 
3、機器狗仿生單腿彈跳/跌落測試 該系統(tǒng)主要驗證仿生單腿的運動能力和可靠性; 測試系統(tǒng)由測試臺架、控制系統(tǒng)和數(shù)據(jù)采集系統(tǒng)組成; 臺架由水平和垂直支架構(gòu)成; 水平臺面上固定有測力傳感器,可監(jiān)控單腿蹬踏力度; 頂部激光測距儀可測試單腿彈跳高度,并結(jié)合蹬踏力數(shù)據(jù)可輸出彈跳高度與蹬踏力的關(guān)系曲線數(shù)據(jù); 砝碼可根據(jù)需要增減,為單腿提供不同的負(fù)重。
2241
德基西瓜 ??? 9月前
化工設(shè)備吊耳、支座匯總 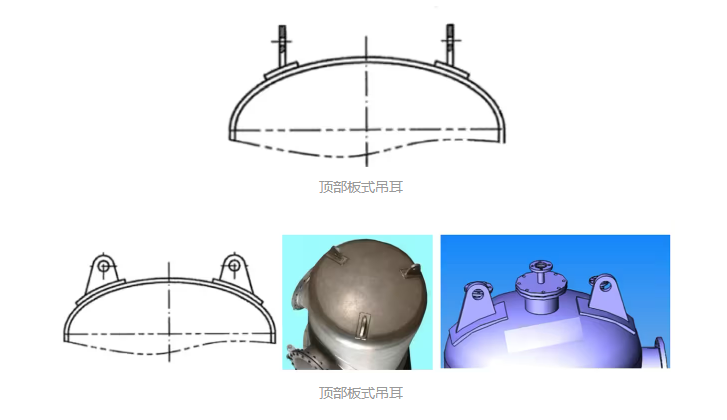
墊板的作用是改善設(shè)備殼體局部受力情況,通過墊板,鞍座承受容器載荷。在筒壁較厚,在鞍座支承反力作用下,筒壁內(nèi)周向應(yīng)力小于許用應(yīng)力情況下,亦可不加墊板。筋板的作用是將墊板、腹板和底板連成一體,加大剛性,可有效地傳遞壓縮力和抵抗外彎矩作用。2-腿式支座腿式支座(簡稱支腿)是壓力容器支座類型中的一種,主要用于立式設(shè)備,少用于臥式設(shè)備。其結(jié)構(gòu)由一塊底板、一塊蓋板、一個支柱焊接而成。
8735 1
機械工程師 ??? 2年前
SACS軟件渤海海域?qū)Ч芗芷脚_船舶撞擊性能分析 附SACS軟件手冊模塊說明下載 
總撞擊力在低撞擊點和高撞擊點分別為22600KN,29800KN,桿件產(chǎn)生的凹陷值分別為16.95cm,7.13cm。撞擊力與桿件凹陷值關(guān)系曲線圖3.1和圖3.2。 撞擊低點導(dǎo)管架腿尺寸為?2604X45,撞擊高點導(dǎo)管架腿尺寸為?2604X80。很顯然得出結(jié)論:當(dāng)撞擊能量一定時,被撞擊桿件壁厚越大,產(chǎn)生的凹陷值越小。
3328 1
飛翔狗狗 ??? 4年前
小米發(fā)布仿生四足機器人“鐵蛋”!解讀背后的建模和仿真技術(shù) 
北鯤云一站式云超算平臺集成了Adams、ANSYS Workbench、Gaussian、GROMACS等多款設(shè)計與仿真軟件,解決軟件安裝繁瑣等困擾;基于公有云模式可提供近無限的算力資源,并支持前后處理可視化、仿真并行化、應(yīng)用交互化等功能,可滿足您對機器人模擬及仿真計算的需求。
2920
深圳北鯤云計算有限公司 ??? 3年前
海浪對離岸結(jié)構(gòu)的影響 
對于像半潛式平臺和張力腿平臺這樣的結(jié)構(gòu),預(yù)測最小空隙和甲板撞擊事件的概率是具有挑戰(zhàn)性的。一個SPAR對12米高的波浪的動態(tài)反應(yīng)由于氣隙設(shè)計中必須考慮到與平臺腿的相互作用,陡波表現(xiàn)出顯著的非線性行為和波幅放大。如果在惡劣環(huán)境中出現(xiàn)負(fù)氣隙,預(yù)測由此產(chǎn)生的甲板沖擊載荷就變得非常重要。
2307
FLOW3D 流體仿真 ??? 1年前
基于Adams的六足直立式步行機器人運動仿真分析 
基于Adams的六足直立式步行機器人運動仿真分析張久雷(廣東職業(yè)技術(shù)學(xué)院 機電工程系, 廣東 佛山 528041)摘要 分析了一種以雙電機為驅(qū)動力、以曲柄連桿機構(gòu)為傳動系統(tǒng)的六足直立式步行機器人的工作原理。
4178 7 8
仿真客 ??? 3年前
SACS軟件單元計算長度修正指南:不再困惑Ly與Lz 
取值為兩端有效支撐之間的距離
情況2:主腿對于導(dǎo)管架的主腿:Lz和Ly都需要修改!
2482 1 2
陳美合 ??? 5月前
Simcenter 3D螺栓連接1D連接以及邊界條件 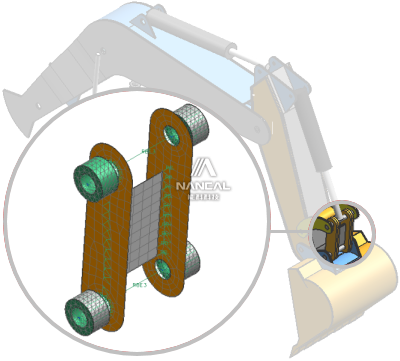
軟件通過計算腿節(jié)點的平均位置來確定核心節(jié)點的位置。
3498 13 7
仿真客 ??? 3年前
系泊失效后漂浮式風(fēng)力機平臺動態(tài)響應(yīng)研究 
趙永生等[9]針對漂浮式風(fēng)力機可能遭遇到的極端惡劣海洋環(huán)境,通過極端載荷統(tǒng)計外推的方法得到了不同概率極端海況下張力腿平臺葉根受力情況。馬剛等[10]對某半潛式浮式風(fēng)力機開展氣動-水動-伺服-彈性耦合數(shù)值模擬,預(yù)報不同向變極端相干陣風(fēng)(ECD)工況與浪流耦合環(huán)境下系統(tǒng)的氣動和水動響應(yīng),發(fā)現(xiàn)在9s左右所研究浮式風(fēng)力機的系泊張力最大,可能造成系泊線的斷裂,這是影響系泊安全的關(guān)鍵參數(shù)。
4907 7 2
泡沫oO ??? 2年前
拓?fù)鋬?yōu)化在注塑件設(shè)計中的應(yīng)用 
第一步:優(yōu)化固定腿在靜載荷下的受力情況;第二步:利用薄弱區(qū)域間的模態(tài)優(yōu)化對生成肋型房屋墻體進行加固。最后,對實際前照燈各部件在不同振動條件下的集成殼體進行了驗證,驗證了其魯棒性。
4752 4 3
張偉一 ??? 2年前
座椅安全新規(guī)落地,大角度座椅安全隱患凸顯,專業(yè)測試成剛需標(biāo)配 
這類座椅坐墊傾角≥15°、軀干角≥35°,集成腿托、按摩、多傳感器與 ECU 控制,徹底改變傳統(tǒng)駕乘姿態(tài)。但舒適背后是致命隱患:大角度姿態(tài)下,傳統(tǒng)安全帶 / 氣囊約束失效,碰撞時胸骨、腰椎重傷風(fēng)險飆升;機電聯(lián)動結(jié)構(gòu)帶來防夾閾值難標(biāo)定、調(diào)節(jié)機構(gòu)易疲勞、極端環(huán)境下電控漂移等問題。現(xiàn)行 GB 15083 舊版標(biāo)準(zhǔn)以靜態(tài)強度測試為主,完全無法覆蓋新場景。
832
德基西瓜 ??? 14天前
有一說一|問界M7,30萬賺百萬? 
坐墊和靠背整體向后傾斜30度,同時腿托伸出承托住雙腿,這樣可以使腿和心臟處于一條水平線上,達(dá)到真正意義的躺平。不過,這樣一個最舒服、最享受的老板位,在給用戶躺平休息時,需要前排駕駛位前滑讓出空間,以及向中間過道平移,才能實現(xiàn)。
2558
汽車大觀 ??? 3年前
新國標(biāo)落地!座椅測試如何幫車企守住合規(guī)與安全底線? 
首先,在靜態(tài)性能測試層面,需精準(zhǔn)完成座椅調(diào)節(jié)角度標(biāo)定、腿托長度、頭枕行程及支撐性等核心參數(shù)的檢測,標(biāo)配國標(biāo)指定的大角度 HPM 測量裝置,確保測試數(shù)據(jù)與國標(biāo)要求高度契合,精準(zhǔn)匹配 M 類車輛座椅測試需求,同時兼顧多車型適配性,解決以往行業(yè)內(nèi)角度標(biāo)注混亂、參數(shù)不統(tǒng)一的痛點。其次,動態(tài)安全測試作為新國標(biāo)重點強調(diào)的內(nèi)容,更是座椅測試的重中之重。
1576
德基西瓜 ??? 1月前
設(shè)計仿真 | AI+仿真雙驅(qū)動!海克斯康領(lǐng)跑人形機器人研發(fā) 
Adams軟件還提供了強大的動力學(xué)分析功能,能夠?qū)θ诵螜C器人的各關(guān)節(jié)部件及連接進行受力分析。例如,可以精確計算大腿骨架載荷和髖側(cè)輔助支撐載荷,幫助研發(fā)人員了解機器人在運動過程中各部件的受力情況,為結(jié)構(gòu)設(shè)計和材料選擇提供重要依據(jù),確保機器人在復(fù)雜工況下的可靠性和安全性。
3241 1 1
海克斯康設(shè)計與仿真 ??? 1年前
極端波浪放大及其對海上結(jié)構(gòu)的沖擊載荷 
四、一個簡化的甲板波浪載荷模型本文開發(fā)了一種簡化的方法,用于求解海上結(jié)構(gòu)甲板下由于波浪傳播引起的水沖擊力。目前的方法基于勢理論,可用于解決夾層型平臺以及半潛式平臺、張力腿平臺(TLP)和重力基礎(chǔ)(GBS)等大體積平臺的波浪沖擊問題。計算得到了由甲板下濕潤區(qū)域定義的面積上的綜合力。圖9.
2905
FLOW3D 流體仿真 ??? 1年前
為智能眼鏡穿上“隱形鎧甲”:沃華慧通可靠性測試解決方案 
專業(yè)的全自動微跌測試系統(tǒng)(如WH-2108-5A)能夠模擬從0.5米(口袋滑落)到2米(工業(yè)場景)的不同高度,覆蓋正面、側(cè)面乃至鏡腿朝下的特殊姿態(tài) 。更重要的是,針對智能眼鏡重心不均的特點,高精度測試設(shè)備支持六面四角跌落,且能實現(xiàn)24小時無人值守連續(xù)作業(yè) 。經(jīng)結(jié)構(gòu)優(yōu)化后的產(chǎn)品,在一次1.2米跌落完好率可達(dá)91.7%——這背后,正是測試設(shè)備提供的精準(zhǔn)數(shù)據(jù)在指導(dǎo)設(shè)計優(yōu)化 。
966
德基西瓜 ??? 2月前
結(jié)構(gòu)仿真 | Circleg利用仿真技術(shù)改善截肢者的生活 
——Max Calabro,Circleg產(chǎn)品開發(fā)人員在您小時候,是否有摔傷腿的經(jīng)歷?如果有類似經(jīng)歷,您可能還記得那時進行基本的日常活動有多么困難。幸運的是,對于一些傷者,幾個星期后腿部就開始恢復(fù)、能承受重量了,然后再過幾周,石膏也可以被拆除。現(xiàn)在,請想象一下,如果一個人的下肢再也不能承受重量,情況會變得多么艱難。
2206
Ansys中國 ??? 7月前
單點系泊系統(tǒng)基本設(shè)計方法概述 
(3)減小環(huán)境力,消耗沖擊能 大部分單點系泊系統(tǒng)采用錨鏈固定方式,在外力作用下能夠產(chǎn)生位移并吸收部分能量。這種型式一方面有效避免了船舶停靠過程中對固定結(jié)構(gòu)的碰撞損傷,另一方面能夠緩沖有效位移反應(yīng)和峰值系纜負(fù)荷。 單點系泊系統(tǒng)包含有允許360°回轉(zhuǎn)的轉(zhuǎn)動結(jié)構(gòu),作業(yè)船舶系泊在轉(zhuǎn)動結(jié)構(gòu)上,能夠隨著風(fēng)、海浪和海流的變化而圍繞固定結(jié)構(gòu)轉(zhuǎn)動,最終停留在所受環(huán)境力最小的位置。
4508
海工 ??? 3年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
