



ZEMAX軟件技術(shù)應(yīng)用專題:用於數(shù)位元投影光學(xué)中均勻照明的陣列透鏡 (蒼蠅眼) 
陣列中每個(gè)單獨(dú)的光學(xué)元件的形狀可以是正方形或矩形。單個(gè)光學(xué)元件的表面形狀可以是球面或變形(垂直和水準(zhǔn)子午線的光焦度不同)。光焦度通常僅在陣列的一個(gè)表面上,而第二個(gè)表面通常是平面的。在 OpticStudio 中對(duì)此設(shè)置進(jìn)行建模的最簡單方法之一是使用陣列物件 (array object)。
2002
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:利用Kogelnik方法模擬體積全像光柵的繞射效率 
然而,為了準(zhǔn)確地說明體積全像的特性,除了考慮繞射光線的傳播方向外,還必須考慮繞射效率、材料收縮或折射率變化等因素。考慮繞射效率使用戶能夠進(jìn)行圖像模擬和綜合優(yōu)化等高級(jí)分析。表面反射光柵與體積全像光柵的比較在介紹這個(gè)模型之前,我們先簡單解釋一下表面反射光柵(SRG)和體積全像光柵(VHG)的區(qū)別。
2122
w**elab86_Swsp ??? 3年前
地表最強(qiáng)半導(dǎo)體封裝前處理 - Ansys Mechanical/Stacker Mesh Workflow 

初探六面體網(wǎng)格生成:實(shí)現(xiàn)「一鍵堆疊」的高效率流程。第三單元:局部錫球 (Local Bump) 建模實(shí)戰(zhàn)封裝核心組件:BGA/Micro-bump 的網(wǎng)格劃分難點(diǎn)分析。局部加密技術(shù):如何在維持全局 Stacker 邏輯下,針對(duì)錫球進(jìn)行精細(xì)化網(wǎng)格處理。確保錫球與基板 (Substrate)、晶圓 (Die) 介面間的節(jié)點(diǎn)匹配與應(yīng)力傳遞精度。
1421 2
鄭鈞 Adam ??? 4月前
ZEMAX軟件技術(shù)應(yīng)用專題:如何在OpticStudio中設(shè)計(jì)DOE透鏡或超穎透鏡 
該圖表未涵蓋設(shè)計(jì)的詳細(xì)訊息,例如,微觀結(jié)構(gòu)可以是傳統(tǒng)的閃耀光柵或現(xiàn)代的超穎透鏡。所需的設(shè)計(jì)和製造方法可能會(huì)有所不同,具體取決於微結(jié)構(gòu)的類型。參考文獻(xiàn)[5]顯示了根據(jù)給定的相位輪廓生成閃耀光柵的範(fàn)例。它還討論了單點(diǎn)金剛石車床的製造。可以在我們的知識(shí)庫文章中找到用於生成閃耀光柵的巨集:如何使用巨集計(jì)算繞射光學(xué)元件的垂度。
2188
w**elab86_Swsp ??? 3年前
Ansys Zemax光學(xué)設(shè)計(jì)軟件技術(shù)教程:眼科鏡片設(shè)計(jì) 
在範(fàn)例檔案中我們以視場角15°和30°進(jìn)行印證,但要注意的是其實(shí)許多眼鏡的設(shè)計(jì)允許配戴者能有50°以上的視角。此外還有一點(diǎn)是我們需要特別注意的,範(fàn)例所使用的設(shè)計(jì)方法忽略了大部分的複雜人眼結(jié)構(gòu),此處我們僅考慮瞳孔的大小,且此時(shí)無轉(zhuǎn)動(dòng)的眼睛也是不被納入考量的。如下圖,對(duì)一個(gè)遠(yuǎn)視的眼睛而言,其遠(yuǎn)點(diǎn)球位於眼球的後方。在OpticStudio中,眼科鏡片的設(shè)計(jì)看起來是十分簡單的。
2212
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:如何使用ZOS-API創(chuàng)建飛行時(shí)間用戶分析 
如下圖所示:來自紅色行人的散射光到達(dá)了雷射雷達(dá)探測器的一個(gè)單位圖元上。雷射雷達(dá)會(huì)將接收到返回信號(hào)花費(fèi)的時(shí)長記錄下來,即飛行時(shí)間,並將飛行時(shí)間轉(zhuǎn)換為距離。圖元的位置可表明入射光的方向。這兩個(gè)值都表明散射光線來自站在離貨車10米遠(yuǎn)的紅色行人。OpticStudio實(shí)際上測量的不是時(shí)間,而是光線路徑長度,也就是物體和探測器之間的距離。
2080
w**elab86_Swsp ??? 3年前
abaqus 收斂性問題?
目前是建立一個(gè)單自由度的車輛在橋上跑,之前將車體設(shè)成剛體、車輪密度射程0假設(shè)車輪可忽略,這樣的情況下,我的步驟一加載重力可以收斂,到步驟二也可以讓車輛往前跑。但現(xiàn)在我也將車輪設(shè)成剛體,在步驟一就出現(xiàn)Too many attempts made for this increment這個(gè)問題,想請(qǐng)問需要如何解決?從圖片來看我的車輪旋轉(zhuǎn)了,請(qǐng)問要從哪裡改,才能使重力收斂
2194 5 3
姜瀚荃 ??? 2年前
ZEMAX軟件技術(shù)應(yīng)用專題:在 OpticStudio 中模擬高階雷射光束 
但是,確定何時(shí)產(chǎn)生不同的解決方案很簡單。該解決方案與相應(yīng)的 Hermite-Gaussian 結(jié)果不一致(對(duì)於大 e,它們應(yīng)該如此)。在這種情況下,應(yīng)使用高斯束腰光束選項(xiàng)來模擬光束模式。雷射的一般輸出可以從近軸波動(dòng)方程的解中找到。對(duì)於雷射增益孔徑中的矩形、圓形和橢圓對(duì)稱性,已經(jīng)找到了該方程的三組正交解。所有這三種解決方案都可以在物理光學(xué)傳播 (POP) 中的 OpticStudio 中建模。
2057
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:智慧型手機(jī)鏡頭模組 
大多數(shù)都有多個(gè)相機(jī)單元,這對(duì)設(shè)計(jì)師和製造商提出了挑戰(zhàn),以滿足嚴(yán)格的性能、成本和尺寸要求。在這篇Blog中,我們將討論 Zemax 解決方案如何幫助應(yīng)對(duì)和克服這些挑戰(zhàn)。智慧型手機(jī)鏡頭模組用於智慧型手機(jī)相機(jī)的鏡頭模組非常複雜,每個(gè)模組都包含多個(gè)鏡頭元件。追求更好的成像性能,加上需要模組盡可能小以增強(qiáng)手機(jī)的美感,需要復(fù)雜的設(shè)計(jì)形式。透鏡的形狀通常是高度非球面的。
2042
w**elab86_Swsp ??? 3年前
有限元理論基礎(chǔ)及Abaqus內(nèi)部實(shí)現(xiàn)方式研究系列42: 聲學(xué)分析(1)-有限元 
該模型從鄭鈞Adam老師的Abaqus線性動(dòng)力&噪音分析詳解(理論及實(shí)作) Abaqus 線性 動(dòng) 力 & 噪音分析詳解 ( 理論及實(shí)作 ) 視頻教程 _ 培訓(xùn)課程 - 技術(shù)鄰 (jishulink.com) 下載獲得。由于卡車為對(duì)稱模型,所以只用建一半模型,聲音到了對(duì)稱面將全反射,但和結(jié)構(gòu)分析不同,聲學(xué)有限元邊界默認(rèn)全反射,所以在此對(duì)稱面無需任何額外設(shè)置。
8466 15 16
SnowWave02 ??? 2年前
【搬運(yùn)視頻】ANSYS Workbench Mechanical 入門操作介紹 
ANSYS Workbench Mechanical 入門操作介紹 此部影片簡單的介紹ANSYS Workbench和Mechanical的基礎(chǔ)操作,簡單的讓大家了解整體分析流程,詳細(xì)的課程請(qǐng)見完整的教學(xué)影片視頻出自山姆CAE學(xué)院
1560 3
abaquser ??? 5年前
【CFD專欄】基于CFD仿真、元建模和貝葉斯推斷方法的離心泵優(yōu)化設(shè)計(jì) 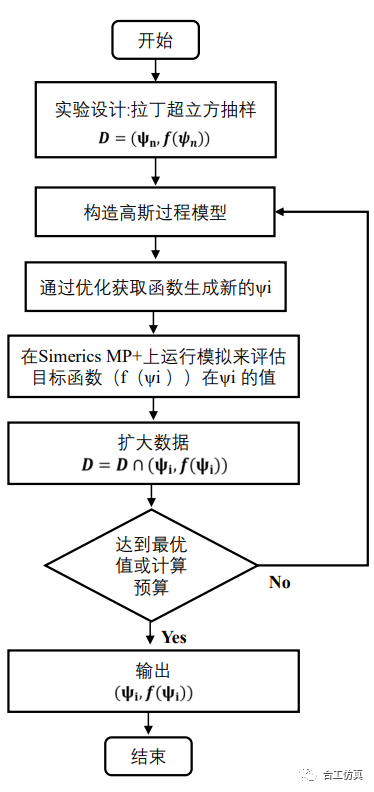
基于CFD仿真、元建模和貝葉斯推斷方法的離心泵優(yōu)化設(shè)計(jì)
2899 3 1
我愛汽輪機(jī)仿真 ??? 2年前
[VirtualLab] 薄元近似(TEA)與傅立葉模態(tài)方法(FMM)在光柵建模中的對(duì)比 ![[VirtualLab] 薄元近似(TEA)與傅立葉模態(tài)方法(FMM)在光柵建模中的對(duì)比](https://img.jishulink.com/msimage/202511/63d7f1218a47287bf764e094c3fc64fb.png?image_process=resize,fw_294,fh_172,)
摘要薄元近似(TEA)是一種廣泛使用的方法,例如傅立葉光學(xué)計(jì)算光柵的衍射效率。 然而,眾所周知,相對(duì)較小的光柵周期,該近似變得不準(zhǔn)確。 在此示例中,我們選擇兩種類型的透射光柵:正弦光柵和閃耀光柵。 我們同時(shí)使用TEA和FMM(也稱為RWCA,是嚴(yán)格算法)來分析具有不同周期的此類光柵,并通過比較結(jié)果來研究這兩種方法的特性。
1939
信光嗎 ??? 6月前
薄元近似(TEA)與傅立葉模態(tài)方法(FMM)在光柵建模中的對(duì)比 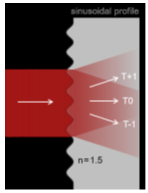
摘要薄元近似(TEA)是一種廣泛使用的方法,例如傅立葉光學(xué)計(jì)算光柵的衍射效率。 然而,眾所周知,相對(duì)較小的光柵周期,該近似變得不準(zhǔn)確。 在此示例中,我們選擇兩種類型的透射光柵:正弦光柵和閃耀光柵。 我們同時(shí)使用TEA和FMM(也稱為RWCA,是嚴(yán)格算法)來分析具有不同周期的此類光柵,并通過比較結(jié)果來研究這兩種方法的特性。
2323
追光ing ??? 1年前
基于 ABAQUS 的多尺度有限元模型橋梁檢測與評(píng)估 
由表 2 可知,宏觀有限元模型與精細(xì)化有 限元模型目標(biāo)解計(jì)算的撓度值偏差 6%、 應(yīng)力值偏 差 18%;而多尺度有限元模型與精細(xì)化有限元模型 目標(biāo)解計(jì)算的撓度值偏差 3%、應(yīng)力值相同。同時(shí), 多尺度有限元模型計(jì)算時(shí)長比精細(xì)化有限元模型 目標(biāo)解計(jì)算時(shí)長減少 85%。
4478 5 5
CAEer吳皓 ??? 2年前
慣容系統(tǒng)(加速度相關(guān)型阻尼器)有限元概念建模方法——大道即簡,模擬直切要害 
本視頻抓住了慣容系統(tǒng)本質(zhì),實(shí)現(xiàn)了加速度相關(guān)元件極簡的兩點(diǎn)式建模,并將有限元計(jì)算結(jié)果與MATLAB理論值進(jìn)行對(duì)比,表明有限元分析結(jié)果完全等效于理論結(jié)果。 全網(wǎng)第一個(gè)提出慣容系統(tǒng)的 ABAQUS 概念建模方法,可發(fā)論文。后續(xù)教程和模型需單獨(dú)聯(lián)系。
1966
會(huì)CAE的喵星人 ??? 2年前
基于COMSOL的螺栓連接 的幾種有限元建模方法 
基于COMSOL的螺栓連接 的幾種有限元建模方法視頻分成兩部分,第二部分包含第一個(gè)部分。
1460 1
天佑有限元 ??? 6年前
有限元理論基礎(chǔ)及Abaqus內(nèi)部實(shí)現(xiàn)方式研究系列40: 梁單元差異(4)-形心、剪心和偏置 
一方面我們查閱各個(gè)主流商用軟件的理論手冊(cè)并通過進(jìn)行大量的資料查閱猜測內(nèi)部修正方法,另一方面我們自己編程實(shí)現(xiàn)結(jié)構(gòu)有限元求解器,通過自研求解器和商軟的結(jié)果比較來驗(yàn)證我們的猜測,如同管中窺豹一般來研究的修正方法,從而猜測商用有限元軟件的內(nèi)部計(jì)算方法。
5179 11 6
SnowWave02 ??? 3年前
提升有限元分析核心能力,這三類概念思維不可或缺 
二、運(yùn)用概念指導(dǎo)邊界條件的施加 邊界條件和載荷的施加是有限元分析中的關(guān)鍵環(huán)節(jié), 如果說劃分網(wǎng)格會(huì)影響到計(jì)算的精度,那么邊界條件的施加則直接決定了計(jì)算是否正確。 1、施加約束和荷載時(shí),注意方法并不唯一。 一個(gè)典型的問題就是采用簡支梁加載形式還是懸臂梁加載形式。
2470 8 3
仿真客 ??? 3年前
復(fù)雜艙段結(jié)構(gòu)的快速有限元網(wǎng)格劃分 
故實(shí)際建模中,需要同時(shí)考慮建模精細(xì)程度與計(jì)算效率,控制建模尺度與網(wǎng)格單元類型,目前可采用有限元商用軟件進(jìn)行四面體快速建模,為控制單元規(guī)模和便于后語網(wǎng)格優(yōu)化與處理,本文將綜合多個(gè)前處理軟件(包含Hyper Mesh、Apex、Patran)的優(yōu)勢功能,實(shí)現(xiàn)快速、有效和合適的有限元網(wǎng)格建模,最后基于實(shí)際產(chǎn)品結(jié)構(gòu)進(jìn)行方法驗(yàn)證與應(yīng)用,驗(yàn)證該方法的正確性和有效性。
3553 4 1
星空caer ??? 2年前
20條/頁 
 89
89 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
