



振動(dòng)篩分機(jī)械動(dòng)力學(xué)分析 附機(jī)械動(dòng)力學(xué)第2版下載 
下載地址:機(jī)械動(dòng)力學(xué)第2版
2002
仿真家 ??? 4年前
使用仿真分析軸承不對(duì)中引起的機(jī)械振動(dòng) 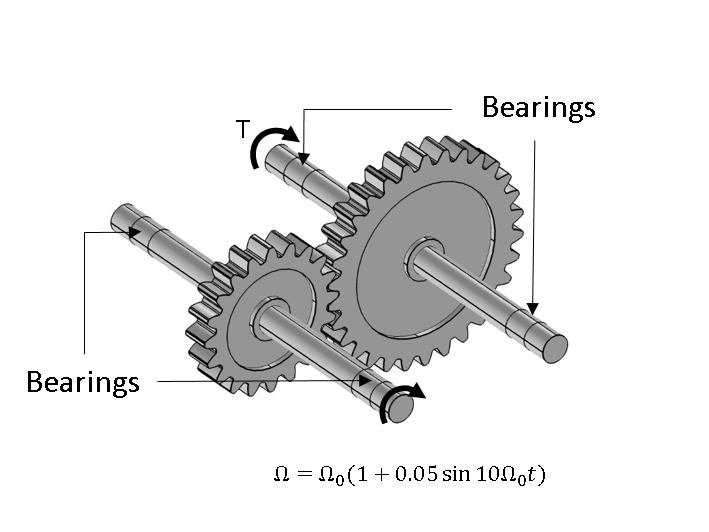
拓展閱讀閱讀下列文章,了解有關(guān)軸承仿真的更多信息: 如何在 COMSOL Multiphysics? 中模擬滾子軸承 評(píng)估軸承不對(duì)中對(duì)轉(zhuǎn)子振動(dòng)的影響 使用轉(zhuǎn)子動(dòng)力學(xué)分析比較流體動(dòng)力軸承文章來(lái)源:comsol
2831 1
聲學(xué)工程師小吳 ??? 2年前
旋轉(zhuǎn)機(jī)械的振動(dòng)狀態(tài)信號(hào)檢測(cè)與故障診斷
旋轉(zhuǎn)機(jī)械在運(yùn)行過(guò)程中伴有振動(dòng),當(dāng)發(fā)生故障時(shí),振動(dòng)信號(hào)也會(huì)出現(xiàn)異常,所以對(duì)旋轉(zhuǎn)機(jī)械的振動(dòng)信號(hào)進(jìn)行監(jiān)測(cè),能夠?qū)υO(shè)備運(yùn)行狀態(tài)進(jìn)行預(yù)測(cè)和對(duì)故障進(jìn)行診斷,這有著重要的現(xiàn)實(shí)意義和經(jīng)濟(jì)價(jià)值。
2428 1
機(jī)械發(fā)明愛(ài)好者 ??? 3年前
如何減輕車(chē)體機(jī)械振動(dòng) 附機(jī)械振動(dòng)基礎(chǔ)陳奎孚下載 
下載地址:機(jī)械振動(dòng)基礎(chǔ)陳奎孚
1953
langnao4405 ??? 4年前
電驅(qū)動(dòng)系統(tǒng)減速器剛?cè)狁詈蟿?dòng)力學(xué)建模及振動(dòng)噪聲優(yōu)化 
電驅(qū)動(dòng)系統(tǒng)驅(qū)動(dòng)電機(jī)振動(dòng)噪聲優(yōu)化方法:現(xiàn)階段,驅(qū)動(dòng)電機(jī)振動(dòng)噪聲主要包括三類(lèi),分別是電磁噪聲、機(jī)械噪聲以及空氣動(dòng)力噪聲。由于不同噪聲出現(xiàn)原因不同,因此所使用優(yōu)化方法也存在一定差異。即在實(shí)際工作中,技術(shù)人員需結(jié)合實(shí)際情況制定具體優(yōu)化方案。
2212 5 2
聲學(xué)工程師小吳 ??? 2年前
電驅(qū)動(dòng)系統(tǒng)減速器剛?cè)狁詈蟿?dòng)力學(xué)建模及振動(dòng)噪聲優(yōu)化 
電驅(qū)動(dòng)系統(tǒng)驅(qū)動(dòng)電機(jī)振動(dòng)噪聲優(yōu)化方法:現(xiàn)階段,驅(qū)動(dòng)電機(jī)振動(dòng)噪聲主要包括三類(lèi),分別是電磁噪聲、機(jī)械噪聲以及空氣動(dòng)力噪聲。由于不同噪聲出現(xiàn)原因不同,因此所使用優(yōu)化方法也存在一定差異。即在實(shí)際工作中,技術(shù)人員需結(jié)合實(shí)際情況制定具體優(yōu)化方案。
4245 2 1
聲學(xué)工程師小吳 ??? 2年前
2024機(jī)械工程、動(dòng)力學(xué)與電氣工程國(guó)際會(huì)議(ICMEDEE 2024) 
機(jī)械摩擦、磨損和潤(rùn)滑制造過(guò)程的建模、分析和仿真數(shù)控技術(shù)和數(shù)控機(jī)床機(jī)械控制機(jī)械設(shè)計(jì)機(jī)械制造技術(shù)機(jī)電一體化微機(jī)電系統(tǒng)微細(xì)加工自動(dòng)化自動(dòng)控制全集成自動(dòng)化機(jī)器人學(xué)機(jī)械動(dòng)力學(xué)和振動(dòng)機(jī)械傳動(dòng)應(yīng)用機(jī)械設(shè)計(jì)與理論軋制機(jī)器組裝過(guò)程非線性動(dòng)力學(xué)混沌理論復(fù)雜網(wǎng)絡(luò)金融動(dòng)力學(xué)進(jìn)化動(dòng)力學(xué)
2324 1
小程序用戶_YstOijxE ??? 2年前
藝?yán)袊?guó)招聘高級(jí)機(jī)械工程師(振動(dòng)設(shè)備設(shè)計(jì)方向) 
機(jī)械工程或相關(guān)專業(yè)本科以上學(xué)歷2. 10年以上機(jī)械設(shè)計(jì)經(jīng)驗(yàn)3. 有振動(dòng)篩、給料機(jī)等振動(dòng)系統(tǒng)設(shè)計(jì)經(jīng)驗(yàn)。4. 良好的英語(yǔ)聽(tīng)說(shuō)讀寫(xiě)能力,英語(yǔ)六級(jí)優(yōu)先5. 深刻理解并能運(yùn)用機(jī)械工程知識(shí)解決產(chǎn)品設(shè)計(jì)、制造和質(zhì)量相關(guān)問(wèn)題6. 熟悉材料性能和制造工藝,特別是機(jī)械加工和焊接。7. 熟練運(yùn)用CATIA、Inventor、Pro E等三維軟件完成機(jī)械設(shè)計(jì)8.
2124
Anna_4414 ??? 3年前
基于機(jī)械系統(tǒng)動(dòng)力學(xué)自動(dòng)分析的多噴頭3D打印機(jī)運(yùn)動(dòng)學(xué)研究 
通過(guò)ADAMS仿真軟件進(jìn)行運(yùn)動(dòng)學(xué)虛擬仿真分析。3D打印機(jī)可通過(guò)增加打印噴頭數(shù)量來(lái)提高打印速度。通過(guò)對(duì)多噴頭的協(xié)作打印方案進(jìn)行運(yùn)動(dòng)仿真模擬計(jì)算,得到運(yùn)動(dòng)學(xué)特性。通過(guò)對(duì)比分析不同時(shí)刻的末端執(zhí)行器的速度、加速度和受力情況,驗(yàn)證3D打印機(jī)機(jī)械機(jī)構(gòu)運(yùn)動(dòng)可行性。相比于傳統(tǒng)3D打印機(jī),該打印機(jī)對(duì)于回轉(zhuǎn)體零件的打印效率顯著提高。
4500 4
擺渡人張 ??? 2年前
T型槽試驗(yàn)平臺(tái):重載工況下的“定海神針”,穩(wěn)到讓振動(dòng)“自閉”
在重型機(jī)械試驗(yàn)、大型工件檢測(cè)、重載設(shè)備校準(zhǔn)等場(chǎng)景中,“穩(wěn)”是核心訴求——一旦平臺(tái)出現(xiàn)輕微晃動(dòng)或振動(dòng),不僅會(huì)導(dǎo)致試驗(yàn)數(shù)據(jù)失真、檢測(cè)結(jié)果偏差, 
T型槽試驗(yàn)平臺(tái):重載工況下的“定海神針”,穩(wěn)到讓振動(dòng)“自閉” 在重型機(jī)械試驗(yàn)、大型工件檢測(cè)、重載設(shè)備校準(zhǔn)等場(chǎng)景中,“穩(wěn)”是核心訴求——一旦平臺(tái)出現(xiàn)輕微晃動(dòng)或振動(dòng),不僅會(huì)導(dǎo)致試驗(yàn)數(shù)據(jù)失真、檢測(cè)結(jié)果偏差,還可能引發(fā)工件移位、設(shè)備損壞等安全隱患。
2143
河北威岳 ??? 3月前
科普 | 人耳如何將聲音從機(jī)械振動(dòng)轉(zhuǎn)化為神經(jīng)信號(hào)? 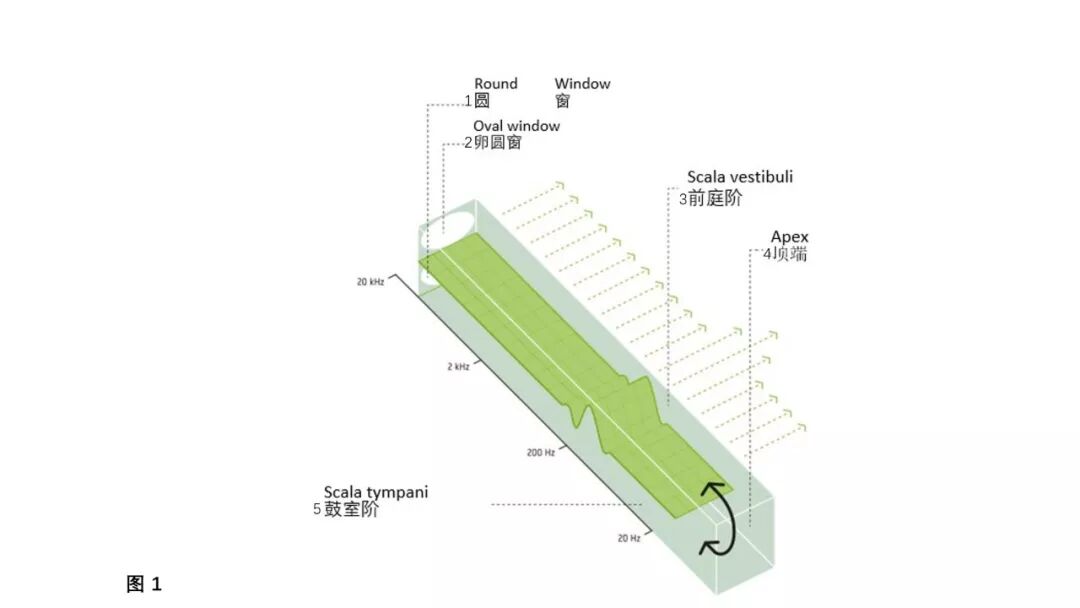
本文通過(guò)仔細(xì)研究耳蝸,考察了將聲音從機(jī)械振動(dòng)轉(zhuǎn)化為神經(jīng)信號(hào)的過(guò)程。 圖 1在《人耳的內(nèi)部構(gòu)造》中,我們通過(guò)耳蝸內(nèi)部的簡(jiǎn)化示意圖(類(lèi)似于圖1中的插圖),介紹了基底膜與前庭階和鼓室階中的淋巴液之間的相互作用。
6873
HBK聲學(xué)與振動(dòng) ??? 2年前
機(jī)械工程中多體動(dòng)力學(xué)的運(yùn)用進(jìn)展 
隨著科技的不斷進(jìn)步,很多新的科學(xué)技術(shù)都被研發(fā)和應(yīng)用,多體動(dòng)力學(xué)也作為一項(xiàng)高科技技術(shù)廣泛的應(yīng)用在機(jī)械工程領(lǐng)域。機(jī)械工程領(lǐng)域的很多設(shè)備設(shè)計(jì)和產(chǎn)品研發(fā),都需要應(yīng)用多體系統(tǒng)動(dòng)力學(xué)的相關(guān)知識(shí)。據(jù)此,重點(diǎn)闡述了多體動(dòng)力學(xué)在機(jī)械工程領(lǐng)域的具體應(yīng)用,希望為同行提供一些參考。
2330 2 1
CAE仿真學(xué)習(xí)菌 ??? 2年前
matlab與Adams的機(jī)械臂運(yùn)動(dòng)學(xué)驗(yàn)證 
1、Adams的運(yùn)動(dòng)學(xué)建模 在Adams中建立機(jī)械臂模型,如圖1所示,箭頭為機(jī)械臂末端執(zhí)行器的初始位置。
2971 1 1
木火柴 ??? 4年前
三自由度機(jī)械臂運(yùn)動(dòng)學(xué)分析+仿真 
建立坐標(biāo)系 1正運(yùn)動(dòng)學(xué)分析 采用標(biāo)準(zhǔn)的D-h法進(jìn)行機(jī)械腿模型分析: 將連桿坐標(biāo)系的原點(diǎn)建立在連桿的關(guān)節(jié)連桿末端。 一、建立D-H連桿坐標(biāo)系的原則 1.Z,軸沿關(guān)節(jié)軸i+1的軸向。 2.原點(diǎn)O為Zi.,與Zi軸的交點(diǎn)或其公垂線與關(guān)節(jié)軸Zi的交點(diǎn)。3.Xi軸沿Zi與Zi軸的公垂線方向,由關(guān)節(jié)軸i指向關(guān)節(jié)軸i+1。
3985
余俊煒 ??? 2年前
在風(fēng)電設(shè)備測(cè)試、工程機(jī)械總裝、重型工裝定點(diǎn)等工業(yè)場(chǎng)景中,T型槽鐵地板常年面臨重載沖擊、高頻振動(dòng)、多工況切換等“狠活”挑戰(zhàn)。越是嚴(yán)苛的作業(yè)環(huán)境 
在風(fēng)電設(shè)備測(cè)試、工程機(jī)械總裝、重型工裝定點(diǎn)等工業(yè)場(chǎng)景中,T型槽鐵地板常年面臨重載沖擊、高頻振動(dòng)、多工況切換等“狠活”挑戰(zhàn)。越是嚴(yán)苛的作業(yè)環(huán)境,越能凸顯其核心價(jià)值——始終穩(wěn)定“拿捏”精度與承重雙重核心需求。作為工業(yè)基礎(chǔ)裝備的“硬核擔(dān)當(dāng)”,T型槽鐵地板為何能在端工況下保持穩(wěn)定?
2317
河北威岳 ??? 3月前
并聯(lián)機(jī)械手爪運(yùn)動(dòng)學(xué)分析 
通過(guò)表2.7的D-H參數(shù),在MATLAB中編寫(xiě)的程序如下圖2.8所示: 圖2.8 Link函數(shù)程序 采摘機(jī)器手爪的運(yùn)動(dòng)學(xué)仿真模型由該程序代碼在MATLAB軟件中運(yùn)行得出,其模型如下圖2.9所示: 圖2.9 機(jī)械手運(yùn)動(dòng)學(xué)模型 2.4.5 運(yùn)動(dòng)模型驗(yàn)證 上文已將完成了對(duì)采摘機(jī)器手爪運(yùn)動(dòng)學(xué)理論模型的建立。
2283
余俊煒 ??? 2年前
如何設(shè)計(jì)實(shí)施機(jī)械系統(tǒng)振動(dòng)、噪聲信號(hào)的測(cè)試實(shí)驗(yàn)
本文將以我參與的一次實(shí)驗(yàn)為背景,來(lái)講述如何設(shè)計(jì)實(shí)施機(jī)械系統(tǒng)振動(dòng)、噪聲信號(hào)的測(cè)試實(shí)驗(yàn),以期能夠?yàn)橐院蟮墓ぷ魈峁﹨⒖肌?shí)驗(yàn)的實(shí)施主要有以下幾部分:實(shí)驗(yàn)設(shè)計(jì),實(shí)驗(yàn)件加工,實(shí)驗(yàn)場(chǎng)地的選址,實(shí)驗(yàn)的進(jìn)行。因?yàn)槲瓷婕皩?shí)驗(yàn)數(shù)據(jù)的處理,故此方面將不涉及。一、實(shí)驗(yàn)設(shè)計(jì),包括實(shí)驗(yàn)件的設(shè)計(jì)、測(cè)試儀器的選擇。1,實(shí)驗(yàn)件的設(shè)計(jì):在這一過(guò)程中應(yīng)盡量注意所設(shè)計(jì)零件的過(guò)渡部分(與基礎(chǔ)等的連接)的加工誤差的控制。
3839 4 3
聲學(xué)工程師小吳 ??? 2年前
六軸機(jī)械臂(帶抓手)運(yùn)動(dòng)學(xué)分析+軌跡規(guī)劃 
1正運(yùn)動(dòng)學(xué)分析 采用標(biāo)準(zhǔn)的D-h法進(jìn)行機(jī)械腿模型分析: D-h表如下 (2)通過(guò)(1)求解出機(jī)器人各位姿變換矩陣后,求解機(jī)器人手臂變換矩陣。通過(guò)matlab 計(jì)算,寫(xiě)出機(jī)器人末端位置。
5208 1
余俊煒 ??? 2年前
ANSYS Workbench傳動(dòng)軸優(yōu)化靜力學(xué)仿真 
通過(guò)計(jì)算機(jī)械結(jié)構(gòu)各個(gè)振動(dòng)模態(tài)的振幅和相位,我們能對(duì)機(jī)械結(jié)構(gòu)的振動(dòng)特性進(jìn)行評(píng)估,包括振幅分布、振動(dòng)模態(tài)之間的耦合情況等。模態(tài)分析不僅用于評(píng)估,還能預(yù)測(cè)特定激勵(lì)條件下,機(jī)械結(jié)構(gòu)的振動(dòng)反應(yīng),進(jìn)而為機(jī)械結(jié)構(gòu)的動(dòng)態(tài)響應(yīng)控制和故障診斷提供指導(dǎo)。總而言之,模態(tài)分析為我們深入理解并處理機(jī)械結(jié)構(gòu)的振動(dòng)特性提供了重要支持,有助于機(jī)械結(jié)構(gòu)的設(shè)計(jì)、優(yōu)化,以及故障的識(shí)別和診斷。
3441 2
力學(xué)AI有限元 ??? 12月前
振動(dòng)與結(jié)構(gòu)動(dòng)力學(xué)測(cè)試 

振動(dòng)與結(jié)構(gòu)動(dòng)力學(xué)測(cè)試振動(dòng)與結(jié)構(gòu)動(dòng)力學(xué)測(cè)試 (免費(fèi)) 【已結(jié)束】? ?直播時(shí)間:5月31日 10:00適用人群:對(duì)結(jié)構(gòu)振動(dòng)、工作狀態(tài)模態(tài)分析、結(jié)構(gòu)健康監(jiān)測(cè)感興趣的所有用戶。
3542
HBK聲學(xué)與振動(dòng) ??? 3年前
20條/頁(yè) 
 138
138 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
