



39基于matlab的全局路徑規劃算法中的快速擴展隨機樹RRT路徑規劃算法及其改進方法RRT Sta 
基于matlab的全局路徑規劃算法中的快速擴展隨機樹RRT路徑規劃算法及其改進方法RRT Star、RRT_Conncet是一種具有狀態約束的非線性系統生成開環軌跡的技術,相比于其他算法可以輕松處理障礙物的問題。程序中的各參數已進行詳細說明,起點坐標,終點坐標,步長,迭代數等均可根據需求進行更改,程序已調通。
2120
matlab應用與學習 ??? 2年前
1-39基于matlab的全局路徑規劃算法中的快速擴展隨機樹RRT路徑規劃算法及其改進方法RRT Star 

基于matlab的全局路徑規劃算法中的快速擴展隨機樹RRT路徑規劃算法及其改進方法RRT Star、RRT_Conncet是一種具有狀態約束的非線性系統生成開環軌跡的技術,相比于其他算法可以輕松處理障礙物的問題。程序中的各參數已進行詳細說明,起點坐標,終點坐標,步長,迭代數等均可根據需求進行更改,程序已調通。購買后可下載視頻中的源程序文件。
276
matlab應用與學習 ??? 1年前
詳解路徑規劃算法 
其中,局部子目標是在滾動窗口中尋找一個全局目標的映射,它必須避開障礙物,且滿足某種優化指標。子目標的選擇方法反映了全局優化的要求與局部有限信息約束的折衷,是在給定信息環境下企圖實現全局優化的自然選擇。 基于滾動窗口的路徑規劃算法依靠實時探測到的局部環境信息,以滾動方式進行在線規劃。
2933 2
駕駛哥 ??? 4年前
242 基于matlab的3D路徑規劃 
基于matlab的3D路徑規劃,蟻群算法(ACO)和天牛須(BAS)以及兩種結合的三種優化方式,對3D路徑規劃的最短路徑進行尋優。程序已調通,可直接運行。
2130
matlab應用與學習 ??? 2年前
241 基于matlab的Dijkstra算法進行路徑規劃 
基于matlab的Dijkstra算法進行路徑規劃。可根據實際情況輸入障礙物和起止點坐標信息; 輸出避碰最短路徑; 能夠利用切線圖算法對障礙物區域進行環境建模,設置障礙物的位置和區域。利用Dijkstra算法進行路徑規劃。程序已調通,可直接運行。
2296
matlab應用與學習 ??? 2年前
281 基于matlab的路徑規劃GUI交互 
基于matlab的路徑規劃GUI交互。包括蟻量系統、蟻周系統、蟻密系統、蟻群系統、免疫混合算法。11種路徑規劃數據,最多225個規劃點。蟻群和免疫算法的參數可進行設置,使得效果最佳。動態顯示可視化規劃結果。程序已調通,可直接運行。
2150 1
matlab應用與學習 ??? 1年前
209基于matlab的無人機路徑規劃
法(CPFIBA)。輸出距 
基于matlab的無人機路徑規劃,包括2D路徑和3D路徑,三種優化算法,分別是蝙蝠算法(BA)、蝙蝠算法融合差分進化算法(DEBA)、結合人工勢場方法的改進混沌蝙蝠算法(CPFIBA)。輸出距離迭代曲線和規劃的路徑。程序已調通,可直接運行。
2549
matlab應用與學習 ??? 2年前
歐洲CCUS技術發展現狀及對我國的啟示/發展現狀/路徑規劃 
孫亮基于數學規劃 和優化高級建模系統(GAMS)的 CCUS 源匯匹配 動態規劃模型研究了CO2捕集與封存累計量的管網 建設與成本問題。結果表明,與靜態規劃相比,動 態規劃下的運輸管網更加成熟,管網的連通性增 強,運輸能力得到提高。該模型可有效確定 CO2 捕 集與封存位置及相應量值、運輸管道拓撲結構及管 徑。
3209
環保達人 ??? 2年前
149基于matlab的A星算法和PSO算法實現路徑規劃動畫演示 
基于matlab的A星算法和PSO算法實現路徑規劃動畫演示,具有GUI界面,可自主生成障礙物。移動靶路徑規劃。程序已調通,可直接運行。
2008
matlab應用與學習 ??? 2年前
1-89基于matlab的人工蜂群和粒子群混合優化的路徑規劃算法 
基于matlab的人工蜂群和粒子群混合優化的路徑規劃算法,起點和終點確定的前提下,在障礙物中尋找最佳路徑。數據可更換自己的,程序已調通,可直接運行。購買后可下載視頻中的源程序文件。
241
matlab應用與學習 ??? 1年前
基于粒子群優化算法的六自由度機械臂三維空間避障規劃 
該算法具有簡單、易實現和全局搜索能力強等優點,非常適合用于復雜環境下的路徑規劃問題。PSO算法基本原理 粒子表示:在路徑規劃問題中,每個粒子代表一條從起始點到目標點的路徑。粒子的位置信息由路徑上的多個節點坐標構成。 初始化:在搜索空間內隨機初始化一組粒子,每個粒子包含位置和速度兩個屬性。初始位置對應于起始點到目標點的一條隨機路徑。
2409
320科技工作室 ??? 1年前
無人駕駛車輛MPC局部路徑規劃+軌跡跟蹤全集 
無人駕駛車輛局部路徑規劃+軌跡跟蹤Carsim配置流程+代碼講解。
1782
愛足球的技術宅 ??? 4年前
圓形路徑子程序如何規劃?
718266368進一步聯系,150/h請教
2326 1 2
啊肥 ??? 4年前
車輛自動駕駛(個人理解) 
通過全局路徑規劃為局部路徑規劃提供信息,本人對此的理解,全局路徑規劃為車輛主要提供定位信息,局部路徑規劃根據全局路徑規劃完成實時避障。右側技術路線,基于仿生學,主要根據車主用車習慣。提出新的定位技術,如下所示:本研究提出了一種新的方法。該技術通過考慮各種交通場景來制定定位策略,以獲得更精確的定位結果。
4069 6
磨刀不誤砍柴工 ??? 2年前
1.2spaceclaim中mesh(beta)全局網格設置(使用邊界框規劃網格) 
sapceclaim 2019 R1以上的版本已經有mesh(beta)功能,基于sapceclaim本身直接建模的思路,網格劃分功能也非常強大,本視頻主要介紹了spaceclaim中mesh(beta)的設置,通過算例講解邊界框功能的運用,以及圖層的用法,并且全局網格的設置(同時對比workbensh mesh 以及spaceclaim mesh中的自由網格劃分、spaceclaim mesh中邊界框的網格劃分方法
85
電驅動ABC ??? 6年前
自動駕駛決策規劃中的問題與挑戰 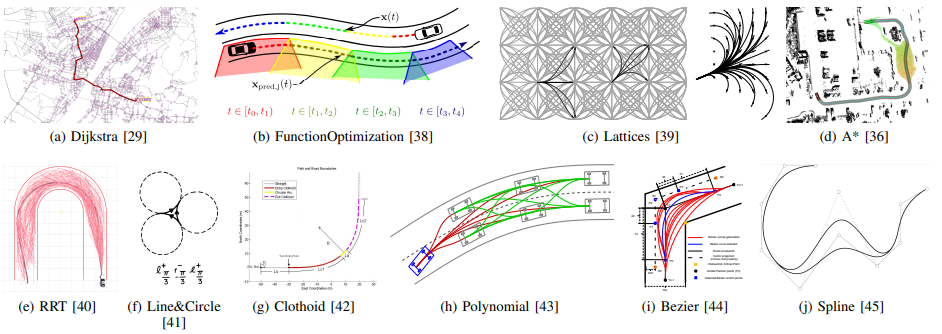
正如人的大腦又分為左腦和右腦一樣,決策規劃模塊又可以繼續分為行為決策層(Behavioral Layer)和運動規劃層(Motion Planning)。 其中,行為決策層在接收到全局路徑后,結合感知信息,進行具體的行為決策;運動規劃層根據具體的行為決策,規劃生成一條滿足特定約束條件的軌跡,該軌跡作為控制模塊的輸入決定車輛最終行駛路徑。
2213
駕駛哥 ??? 3年前
自動駕駛決策規劃中的問題與挑戰
正如人的大腦又分為左腦和右腦一樣,決策規劃模塊又可以繼續分為行為決策層(Behavioral Layer)和運動規劃層(Motion Planning)。 其中,行為決策層在接收到全局路徑后,結合感知信息,進行具體的行為決策;運動規劃層根據具體的行為決策,規劃生成一條滿足特定約束條件的軌跡,該軌跡作為控制模塊的輸入決定車輛最終行駛路徑。
1994
芝能汽車 ??? 3年前
一種基于目標的可解釋的自動駕駛預測和規劃策略 
如果適用,指定機動車輛要遵循的局部軌跡可以表示為 si 1:n,其中包括全局坐標系中的參考路徑和沿路徑的目標速度。為了便于說明,我們假設 si 使用與 si 相同的表示和索引,但通常情況并非如此(例如,s可以按縱向位置而不是時間進行索引,它可以插值到時間指數)。
4343 7 2
駕駛哥 ??? 2年前
VirtualLab Fusion全局選項中的性能設置 
加載和保存全局選項 配置完所有設置后,除了保存類別中的文件路徑外,可以使用以下控件重置、加載和保存全局選項: 性能 內存消耗 ? 更改每個場的最大采樣點數以調整物理內存的使用限制。 ? 激活和停用內存需求仿真的警告。
1340
信光嗎 ??? 9月前
VirtualLab Fusion全局選項中的性能設置 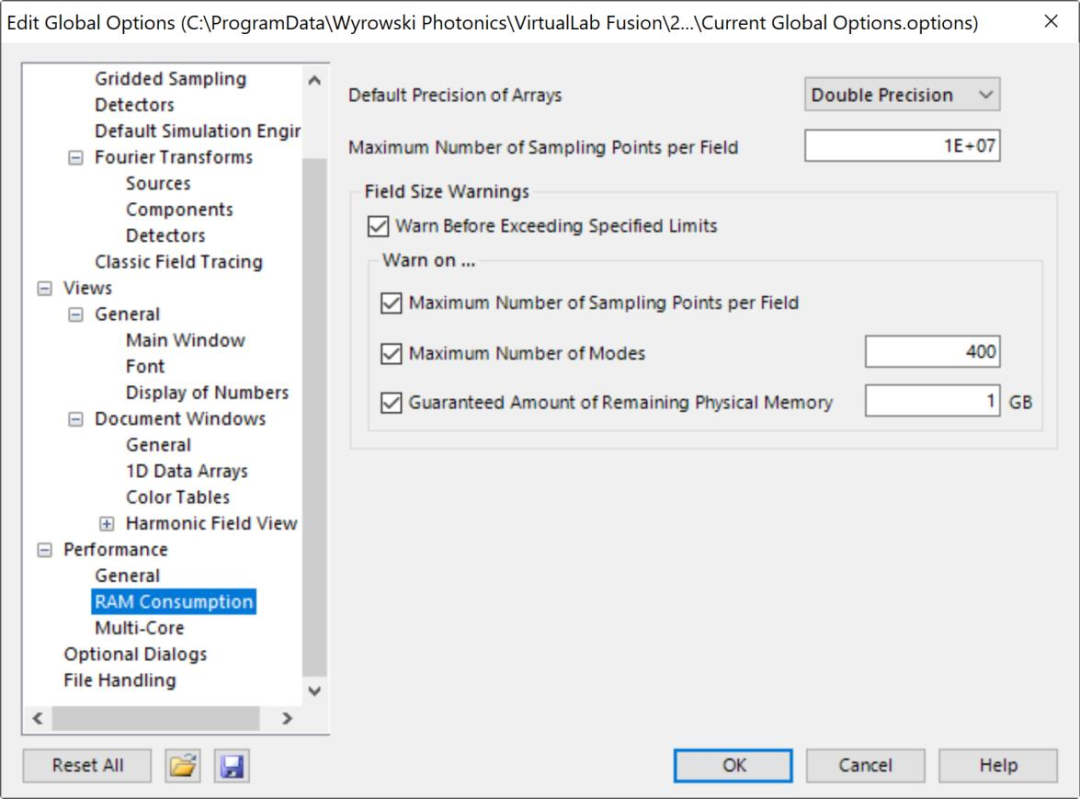
加載和保存全局選項 配置完所有設置后,除了保存類別中的文件路徑外,可以使用以下控件重置、加載和保存全局選項: 性能 內存消耗? 更改每個場的最大采樣點數以調整物理內存的使用限制。? 激活和停用內存需求仿真的警告。 請注意,發出的警告需要用戶輸入,因此會中斷仿真過程。
2089
追光ing ??? 9月前
20條/頁 
 33
33 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
