



【數值算法】共軛梯度法(二)-預處理共軛梯度法 
(1)對角線預處理:對角線預處理指的就是M矩陣為原始系數矩陣A的對角線矩陣。在知名的開源有限元軟件FEAPpv中,就是采用的這種方法進行共軛梯度法預處理。一般情況下,這種方法求解預處理方程十分簡單,但是通常對于系數矩陣嚴格對角占優(yōu)(即對角線元素大于該行其他元素之和)的情況下才比較有效。
2825 1 1
寒江雪_123 ??? 3年前
數據挖掘中的數據預處理 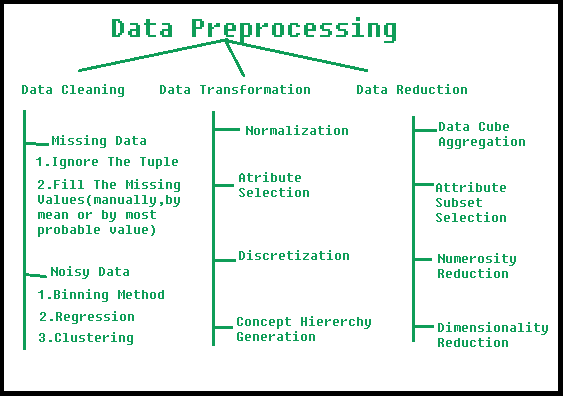
數據預處理是數據挖掘過程中的一個重要步驟。它是指清理、轉換和集成數據,以便為分析做好準備。數據預處理的目標是提高數據質量,使其更適合特定的數據挖掘任務。數據預處理步驟數據預處理是數據挖掘過程中的一個重要步驟,涉及清理和轉換原始數據以使其適合分析。數據預處理中的一些常見步驟包括: 數據清理:這涉及識別和糾正數據中的錯誤或不一致,例如缺失值、異常值和重復項。
2546
仿真資料吧 ??? 1年前
SectionPrepTool|截面預處理工具 
2.截面預處理截面預處理主要有三步:繪制截面-->轉為多段線-->合并輪廓線。需要注意:為了保持統(tǒng)一,在截面中,如果有鋼筋,均用圓來創(chuàng)建,除了鋼筋以外的其他輪廓線,可以采用 CAD 中的任意線型來繪制,同時,如果截面有保護層,也需要將其繪制出來,即實際的截面是怎樣的,就在 CAD 中怎樣繪制。
2328
何小滕 ??? 1年前
使用ANSA完成預處理課程-帶案例-中文字幕
---------------------------------------------------------------------------------------------------------------------------在本課程中,您將使用 Ansa 軟件進入完整的預處理階段,并提供有關處理 3D 鈑金、塑料部件和鑄造模型的詳細說明和分步過程。
2651
仿真資料吧 ??? 11月前
螺栓螺母六面體網格劃分+預緊力+外載+后處理 

1、螺栓六面體網格劃分思路及方法;2、螺母六面體網格劃分;3、接觸建立方法,重點是螺栓螺母的螺紋接觸建立方法;4、預緊力建立方法;5、外載施加方法;6、調用ABAQUS求解及后處理。
4466 63
老李啊 ??? 5年前
workbench 施加螺栓預緊力以及在后處理中如何添加荷載變形曲線 
通過對一個常見金屬抱箍問題的實操,演示如何在workbench中處理對稱模型的問題、螺栓預緊力的施加以及在處理中如何添加荷載和變形關系曲線
2346
村口兩棵樹 ??? 4年前
LS-DYNA中*BOUNDARY_PRESCRIBED_MOTION_RIGID和*INITIAL_VELOCITY_RIGID_BODY的區(qū)別
</li><li>需要結合動力松弛(Dynamic Relaxation)預加載重力或其他靜態(tài)載荷后的初始速度設置</li></ul><p><br></p><p><strong>應用案例:</strong></p><p>延遲啟動運動</p><ul><li>通過<code>*BOUNDARY_PRESCRIBED_MOTION_RIGID</code>的<code>BIRTH</code>和<code
3367 3
OnTheWay08 ??? 1年前
完成 ANSA 預處理課程
最后更新時間 12/2022MP4 |視頻:h264、1280×720 |音頻:AAC,44.1 KHz,2通道 類型:在線學習 |語言:英語 + srt |持續(xù)時間: 85 講座 ( 12h 51m ) |大小: 8.25 GB成為結構分析、網格劃分和帶連接組件裝配的專家您將學到什么 FEA理論 FEA1D 網格劃分理論 – 棒材、棒材、剛性、RBE3
1530
仿真資料吧 ??? 11月前
2023多體動力學分析軟件合集 
特點:求解器運動求解器可以加快大自由度系統(tǒng)的仿真速度;使用共享內存并行處理 (SMP) 和大規(guī)模并行處理 (MPP) 環(huán)境更快地進行仿真。前置后置處理器Ansys Motion 預處理器為組件和系統(tǒng)提供優(yōu)化的建模環(huán)境;組件可以建模為由零件文件和網格文件組成的單個實體。
7585 5
CAE仿真學習菌 ??? 2年前
案例 | Ansys Motion 新能源車電機動力NVH 仿真方案 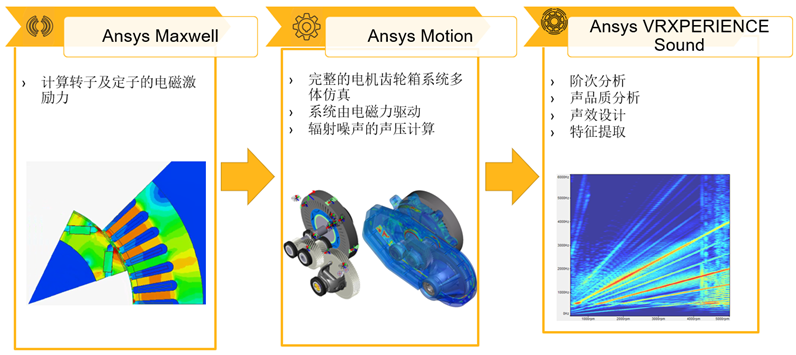
Ansys Motion 后處理-齒輪嚙合 分析得到動力學結果(速度,加速度) 獲取時間域的結果利用短時傅里葉變換(FFT)獲取瀑布圖(Color Map)Ansys Motion 后處理-聲學計算 Ansys Motion / Postprocessor可基于“ Rayleigh積分”來分析系統(tǒng)表面振動產生的聲壓
4490 7 4
聲學仿真初學者 ??? 2年前
何為地下工程“預鋪反粘”防水技術? 
● 樁頭處理(打密封膠、安裝喉箍) ● 陰陽角等細部處理 ● 鋪設完成
2535
規(guī)范圖集大全 ??? 4年前
“兩步法”蠕化處理工藝在蠕墨鑄鐵中的應用 
一般情況下,由于澆注溫度的限制,不允許預處理過球化的鐵液等待。所以,在預處理的過程中,一定要盡量避免過球化預處理。 圖7為預蠕化處理和喂鎂線5.2 m鐵液凝固后的石墨形態(tài)。由圖7可見,預處理后的蠕化率約為95%,喂絲后鐵液的活性鎂含量提高,石墨球數量增多,蠕化率降到約83%。
2994
鑄造工程師 ??? 3年前
自動駕駛決策規(guī)劃中的問題與挑戰(zhàn) 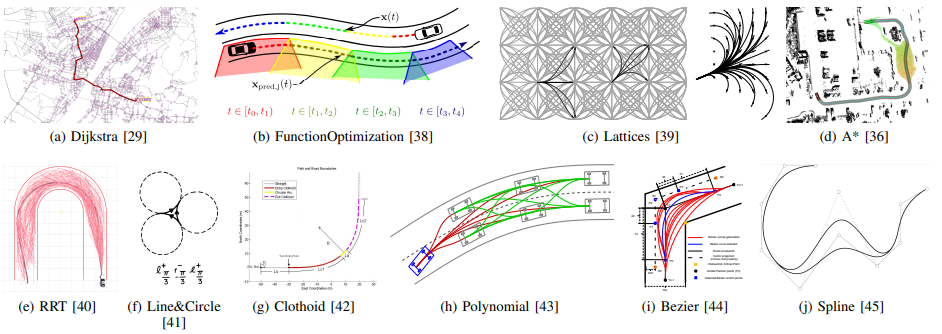
由于感知的不確定性會造成Motion Planning結果的不安全性。一種簡單的處理方式是加buffer,但是粗暴的處理方式會減小Motion Planning的可行域,可能造成過于激進或者過于保守的行駛策略。論文[7]以裝備了Around View Monitoring(AVM)的泊車應用為例,由于感知誤差會使路徑規(guī)劃在實際超車位置停車,可能會發(fā)生碰撞,如下左圖所示。
2213
駕駛哥 ??? 3年前
高低濃度氨氮廢水、高鹽廢水處理工藝 
處理高鹽廢水通常是“預處理—蒸發(fā)濃縮結晶除鹽”工藝。根據具體水量、水質、出水要求、投資、運行成本及技術觀念,不同情況下選擇不同的預處理工藝、技術設備和蒸發(fā)濃縮結晶除鹽工藝。
2400
化工加 ??? 3年前
自動駕駛決策規(guī)劃中的問題與挑戰(zhàn)
由于感知的不確定性會造成Motion Planning結果的不安全性。一種簡單的處理方式是加buffer,但是粗暴的處理方式會減小Motion Planning的可行域,可能造成過于激進或者過于保守的行駛策略。論文[7]以裝備了Around View Monitoring(AVM)的泊車應用為例,由于感知誤差會使路徑規(guī)劃在實際超車位置停車,可能會發(fā)生碰撞,如下左圖所示。
1994
芝能汽車 ??? 3年前
ANSYS雙向耦合磁吸結構仿真案例 
Motion前處理步驟Model1、啟動Ansys Motion Preprocessor 2022R2(Motion的前后處理是分開的軟件),在軟件左上角選擇new→new file2、在彈出的窗口中選擇SubSystem,定義文件名和文件保存路徑,點擊OK? Motion使用3級文件:work-file.dfwork(例如汽車);model-file.dfmodal(例如懸掛系統(tǒng)
4456 9 4
Cruise ??? 3年前
Ansys機器人仿真解決方案 
· 兼容 Ansys 2019 R3以上版本 · 提供 Ansys Workbench 和 Mechanical 環(huán)境的強?功能,以促進 Ansys Motion 模型的 預處理。
4471
Cruise ??? 2年前
基于ADAMS的點按手法運動仿真 
用戶可以利用各種模塊方便地建立機械系統(tǒng)虛擬樣機,并通過強大的后處理模塊對參數的測量結果進行處理與分析。ADAMS采用世界上廣泛流行的多剛體系統(tǒng)動力學理論中的拉格朗日方程方法,選取系統(tǒng)內每個剛體質心在慣性參考系中的3個直角坐標和確定剛性方位的3個歐拉角作為笛卡爾廣義坐標,用帶乘子的拉格朗日方程處理具有多余坐標的完整約束系統(tǒng)或非完整約束系統(tǒng),導出以笛卡爾廣義坐標為變量的運動學方程。
3012 2
擺渡人張 ??? 2年前
六軸碼垛機器人admas正逆運動學仿真 
打開軟件的后處理模塊可觀察到關節(jié)角的變化曲線如圖5-15,即完成了本機器人的運動學反解,通過圖中可以看出本機器人的腕轉關節(jié)和腕擺關節(jié)有較大的抖動,而其他各關節(jié)運動曲線較平滑,總體來看機器人的運動比較平穩(wěn)。
2373
余俊煒 ??? 3年前
lsdyna中動力松弛-螺栓預緊力加載-soild 
3.模型處理實體螺栓模型需要將螺栓設置表面印記,將螺栓的圓柱部分切割出來,建立局部坐標系,加載螺栓預緊力,加載的載荷只能是應力值,結果為預緊力/截面積4.lsdyna螺栓驗證建立螺栓模型,加載預緊力的應力之后,看到結果中螺栓被分成兩端,并重合擠壓,得到需要的螺栓預緊力,所以需要考慮設置中shear and bending5.動力松弛+螺栓預緊力
2443 1
大龍貓?? ??? 4月前
20條/頁 
 60
60 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
