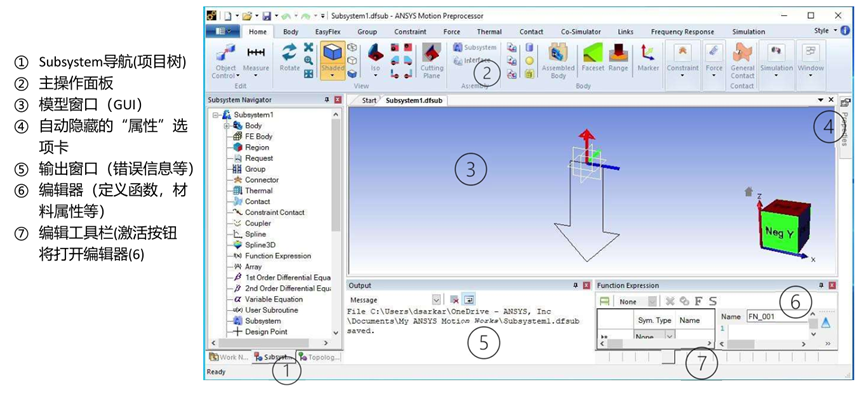
什么是磁吸結構
-使用永磁體之間的磁力進行關閉、密封或定位的結構
-廣泛應用于消費電子、家電、工業及汽車等領域,其中消費電子領域包括但不限于筆記本電腦、平板電腦、手機、磁吸鍵盤、觸控筆、智能保護套等
-典型的磁吸結構應用為:消費電子產品中的定位器、連接器、傳感設備等
磁吸結構設計挑戰
-磁吸閉鎖時,過大的磁力會損壞外殼、連接器等結構
-用戶體驗是重要的設計目標(用戶可以輕易地將物體磁吸合并分離)
-難以對磁鐵間的作用力進行建模,以及確定物體間的沖擊力
ANSYS Motion如何提供助力
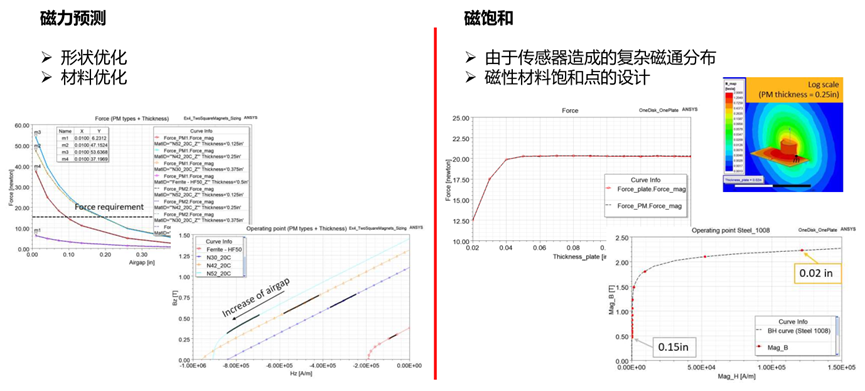
-滿足指定應用場景的磁力設計
-在滿足磁力的要求下,減少尺寸和降低成本
-預測移動軌跡、閉合速度和沖擊力
-預測沖擊后的機械應力
Motion與Maxwell雙向耦合工作流簡介
2022R2新功能:Motion和Maxwell最新仿真流程
-全自由度的Ansys Motion與Maxwell聯合仿真
? 自動創建后處理(report和field plot)
-在每個Motion求解時間步中,Maxwell中的物體會根據Motion傳遞的數據進行移動和旋轉。Maxwell求解后把力和力矩傳遞到Motion中
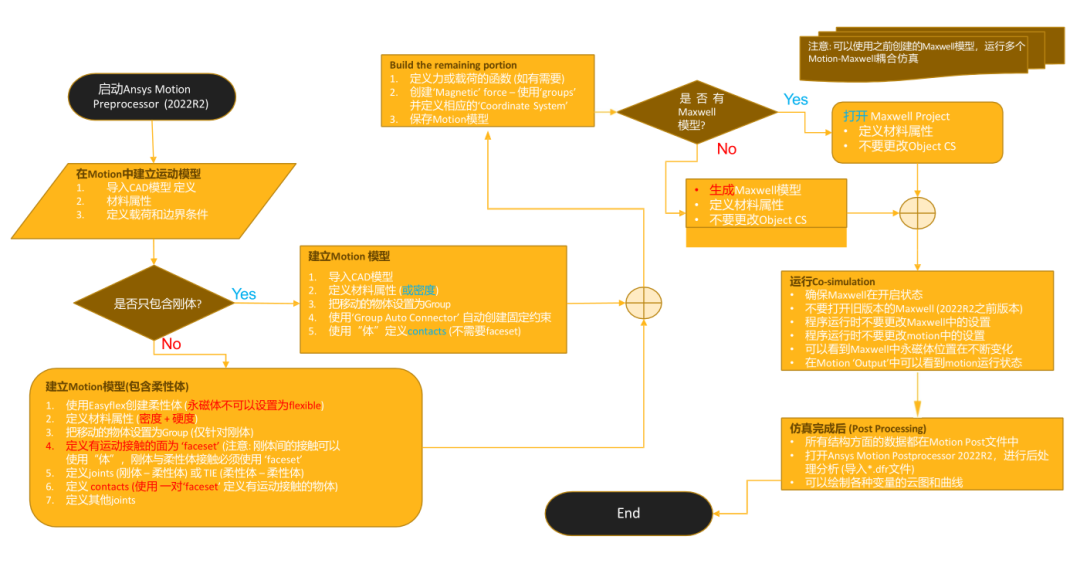
Ansys Motion與Maxwell聯合仿真工作流程
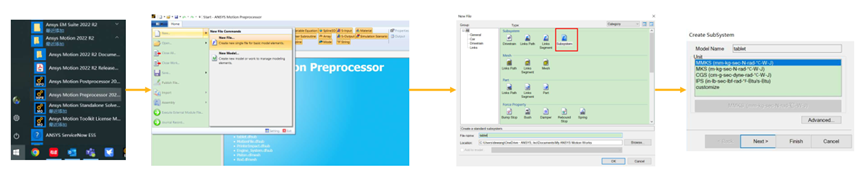
1、啟動Ansys Motion Preprocessor 2022R2(Motion的前后處理是分開的軟件),在軟件左上角選擇new→new file
2、在彈出的窗口中選擇SubSystem,定義文件名和文件保存路徑,點擊OK
? Motion使用3級文件:work-file.dfwork(例如汽車);model-file.dfmodal(例如懸掛系統);subsystem-file.dfsub(例如彈簧)
3、在彈出的窗口中選擇默認的單位MMKS,點擊next設置重力(可以稍后設置)或點擊finish顯示前處理界面
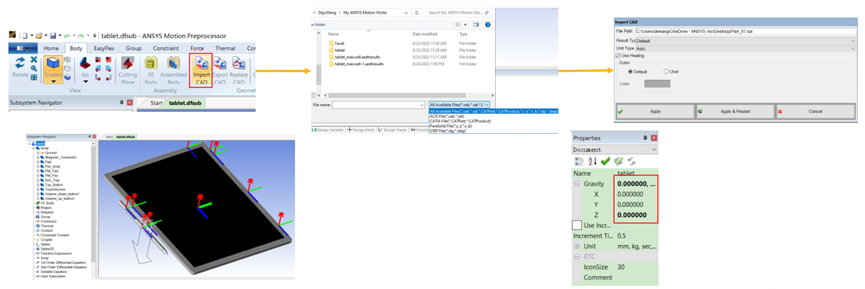
4、在body界面下點擊import CAD導入CAD模型
5、在彈出的窗口中要導入的模型,motion支持多種CAD格式:ACIS、CATIA、Parasolid、step等
6、點擊apply,平板電腦和觸控筆模型導入到軟件中
? 右鍵選擇物體,可以更改模型名字、透明度以及隱藏實體
7、打開自動隱藏的“屬性”選項卡,本案例不考慮重力因素,設置重力為0(XYZ三個方向重力均為0)
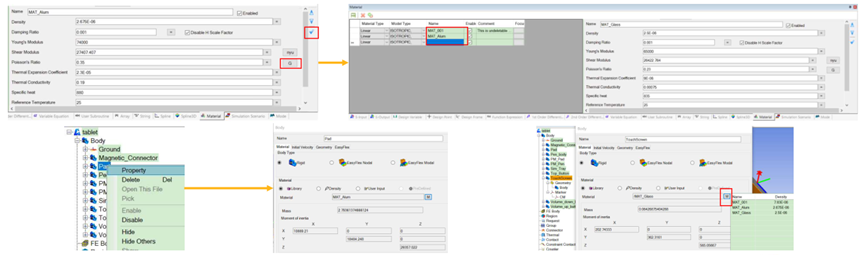
1、點擊軟件下方material工具欄,在材料屬性窗口輸入鋁的材料屬性。輸入楊氏模量和泊松比后點擊“G”,軟件自動計算剪切模量
? 對于剛體,只需定義密度;磁性材料的磁特性需在Maxwell中定義
2、鋁的材料屬性輸入完成后點擊右側“√”,鋁材料添加到軟件中。按照同樣的步驟添加玻璃材料屬性。輸入完成后材料列表中共
有
三個材料:
MAT_001(系統自帶)、鋁和玻璃
3、在模型樹下右鍵選擇物體,點擊property,在彈出的窗口中點擊“M”為物體分配材料屬性。本例中,兩個永磁體按默認材料
MAT_001、觸摸板定義玻璃材料,其他物體定義鋁材料
? 對于剛體,可以在此頁面直接定義密度,不需要再加載材料屬性
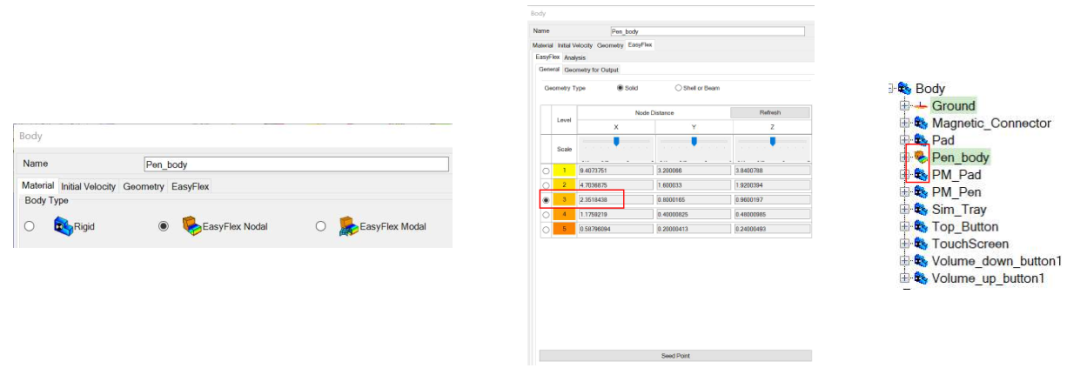
-在模型樹下右鍵選擇物體,點擊property,在彈出的窗口中可以定義剛體或柔性體。本例中定義觸控筆pen_body為柔性體—EasyFlex Nodal
? EasyFlex Nodal: 節點柔性體,采用有限元分析,可以考慮非線性行為
? EasyFlex Modal:模態柔性體,采用模態疊加法計算,速度快,但只能考慮線性行為
-點擊EasyFlex界面,軟件使用簡易的按鈕來控制計算精度(類比網格剖分,數值越小計算越精確)。本例選擇默認設置3
? Seed Point僅用于空心EasyFlex物體,如薄壁盒子
-Group是物體的集合,group內的物體可以批量設置(比如同時移動),方便用戶進行前處理操作
-本例中必須定義group,因為在定義magnetic force時不能直接使用“物體” ,只能通過group定義電磁力。定義group另一個好處是使用group auto connector可以自動創建group內的約束
-本例中創建兩個group,平板電腦和筆(由于pen_body是柔性體,所以group_pen中只包含PM_pen)
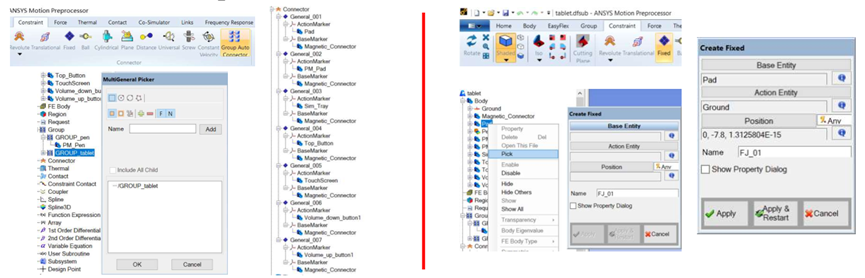
-在group界面下點擊group ,右鍵選擇PM_pen,點擊pick,PM_pen出現在物體列表中,點擊OK完成group的定義
-同樣的方法定義包含平板電腦的Group,共八個物體。點擊OK,在Group菜單下出現group_pen和group_tablet
Group Auto Connector可以自動地為Group內的物體創建固定約束,方便用戶進行前處理操作
1、在constraint界面下點擊Group Auto Connector,右鍵選擇Group_tablet,點擊pick, Group_tablet出現在物體列表中,點擊OK完成Group Auto Connector的定義
? 在Connector菜單下出現七個固定約束,七個物體分別與pad形成固定約束條件
2、在constraint界面下點擊Fixed,在彈出的窗口中base entity選擇pad,action entity選擇Ground,點擊Apply,把pad與大地設為固定約束,這樣GROUP_tablet內的物體全部與大地形成固定約束條件,在仿真過程中保持靜止
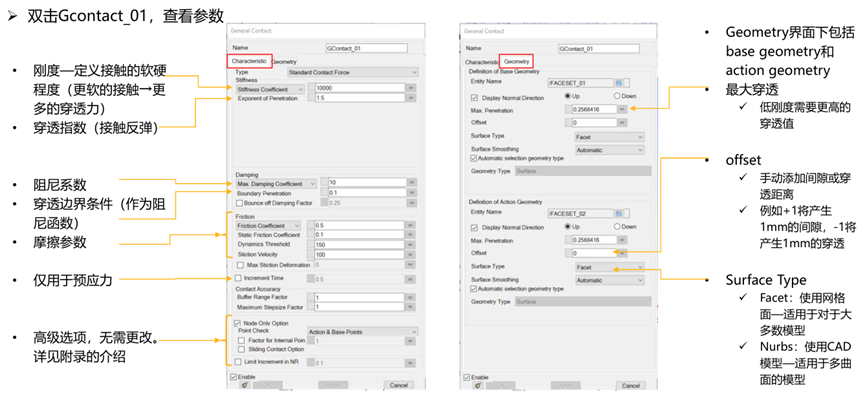
必須為每個可能接觸的物體定義Contact。與約束不同,Contact是面相互接觸不是體相互接觸。
剛體之間的接觸可以使用物體,但是最好使用“faceset”來定義接觸;對于柔性體必須使用“faceset”定義接觸。
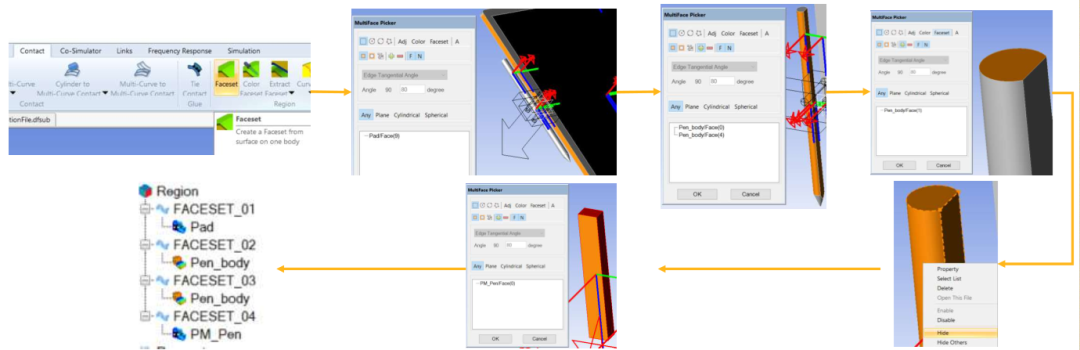
1、在Contact界面下點擊Faceset,點擊平板電腦與觸控筆相鄰的平面,Pad/Face(9)出現在彈出的界面列表中,點擊OK,在Region菜單下生成FACE_SET01
2、同樣的操作,選擇觸控筆兩個表面,生成FACE_SET02;選擇觸控筆上表面,生成FACE_SET03;隱藏觸控筆,選擇觸控筆中永磁體一個表面,生成FACE_SET04
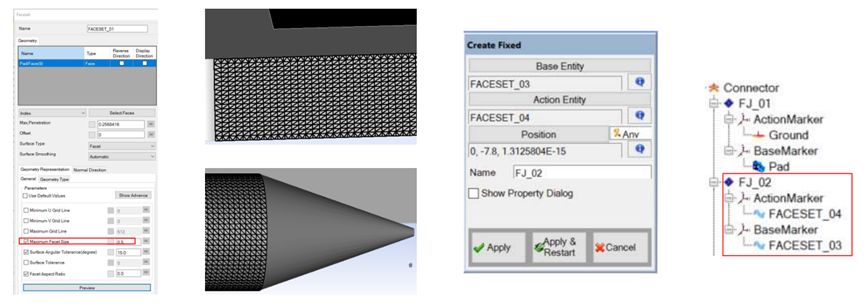
3、雙擊FACESET_01,在general菜單下勾選Max facet size,并填寫0.5。同樣的操作,定義另外三個Faceset網格尺寸為0.5。點擊Preview,可以看到面網格。定義網格的作用是在物體接觸時進行有限元分析。
4、pen_body與PM_pen,應該是固定約束關系,由于pen_body是柔性體,必須通過Faceset定義約束條件。依照之前介紹的步驟,定義FACE_SET03和FACE_SET04為固定約束關系
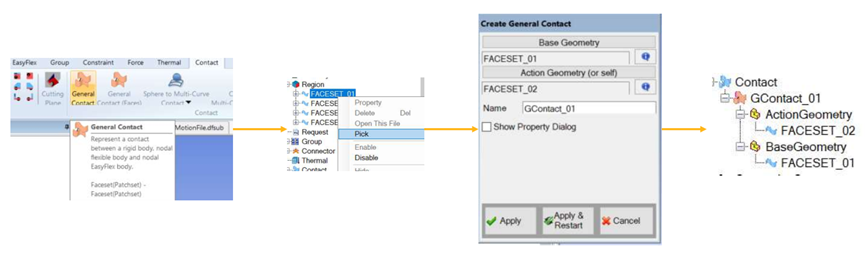
5、在Contact界面下點擊General Contact,點擊Base Geometry下方空白處,右鍵點擊FACESET_01選擇pick,同樣的步驟定義FACESET_02為Action Geometry。點擊apply,在contact菜單下出現Gcontact_01
-Motion與Maxwell通過Magnetic功能傳遞力和力矩數據以及永磁體的位置
-在Force界面下點擊Magnetic,右鍵選擇GROUP_pen和GROUP_tablet,點擊pick,兩個GROUP出現在物體列表中,點擊OK,在Connector菜單下出現Mag_001電磁力約束
? 由于“Magnetic”不能直接調用“物體”,所以只能通過Group定義Magnetic Force
-雙擊Mag_001,設置參數并生成Maxwell project
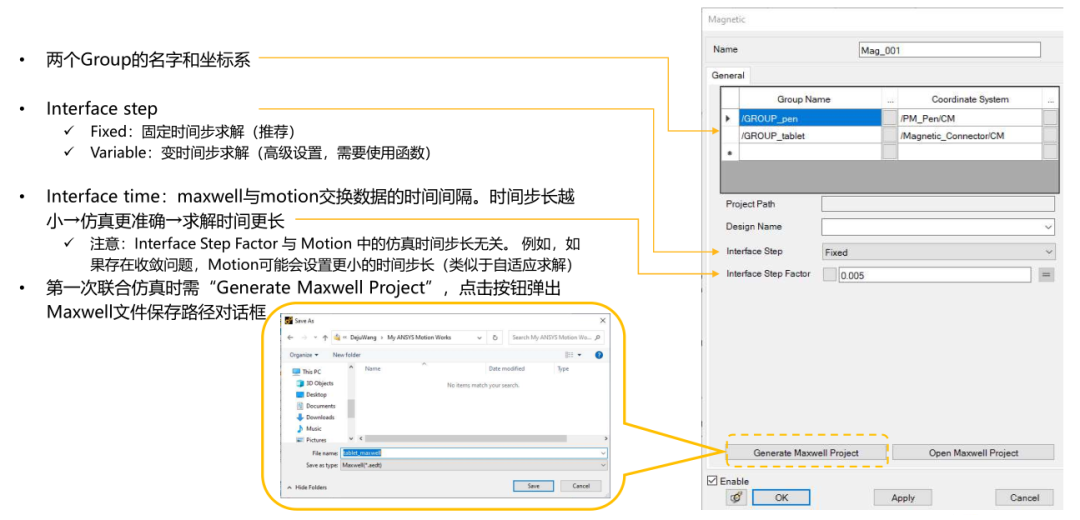
點擊Generate Maxwell Project按鈕,自動生成Maxwell project
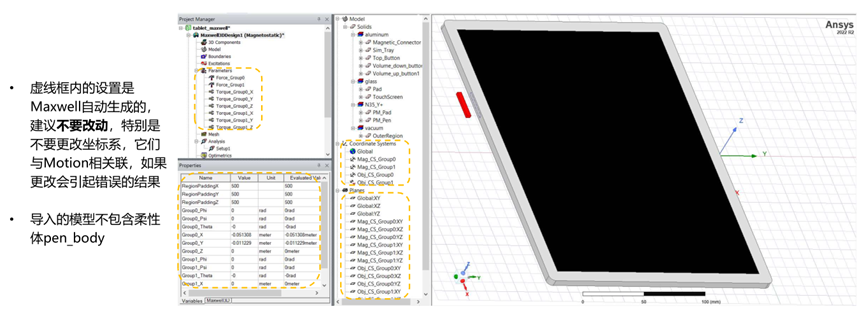
1、更改求解域尺寸。自動生成的模型求解域尺寸為XYZ方向擴展500%,調節求解域尺寸,符合電磁場仿真要求
2、定義材料屬性。自動生成的模型永磁體的材料屬性是空白的,需要用戶定義適合的永磁體材料(其他材料也可編輯與更改)
3、設置setup。自動生成的模型solve setup的percent error為0.5,本例按照電磁仿真默認的1%即可
4、確認是否自動開啟enable material override(Maxwell 3D→design setting)
6、保存project,不要關閉Maxwell,耦合仿真時需要進行數據交換
1、返回到Motion,在Magnetic的Design Name中填寫Maxwell的Design名字,點擊OK
2、在Simulation界面下點擊Run→Modify,在彈出的界面中設置求解時間和時間步長。本例設置求解時間0.04s,時間步長
50步,如果時間步長過小,可能無法捕捉到接觸瞬間電磁力或速度的最大值
3、點擊solver界面,定義并行求解核數,點擊Simulate開始求解
Ansys Motion后處理
-在求解過程中可以看到迭代次數以及求解時間,在maxwell中可以看到永磁體的位置隨著求解時間變化而變化
-求解完成后所有文件都存放在之前定義的文件保存路徑中
-求解完成后Motion post processor自動打開
-如果要打開其他后處理文件,點擊Ansys Motion Postprocessor 2022R2,在彈出的路徑選擇對話框中選擇*.dfr文件
點擊模型顯示窗口下部的紅色錄制按鈕,編輯軟件上方的保存路徑、保存格式(MP4或GIF)以及幀頻,點擊右側“+”,動畫自動保存到設置的路徑中
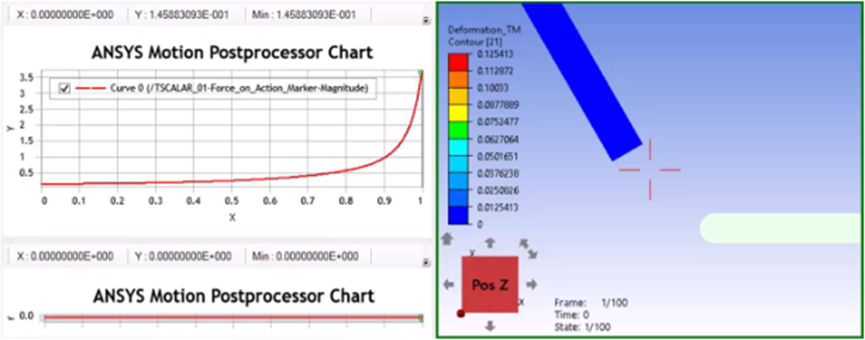
點擊軟件左上角contour,模型列表中只有柔性體pen_body,Mapping type選擇FE Node,characteristic選擇Displacement(還可以選擇其他的物理量),Component選擇Y,點擊左側“+”,繪制觸控筆在接觸過程中Y方向的形變云圖
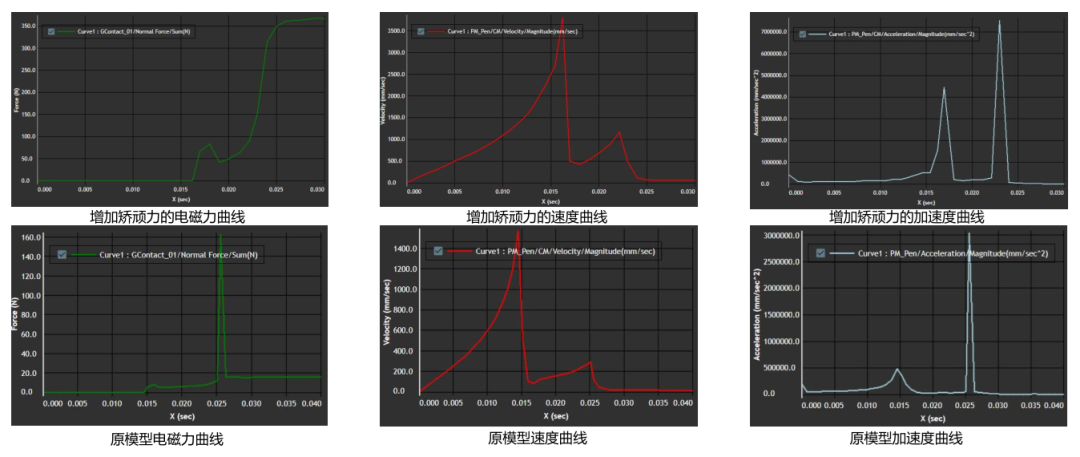
-點擊chart→create chart→add curve,模型列表中選擇Contact→Gcontact_01, characteristic選擇Normal Force(還可以選擇其他的物理量),Component選擇Sum,點擊左側“+”,繪制觸控筆在接觸過程中電磁力曲線
-按照同樣的方法,選擇PM_pen→PM_pen/CM,繪制觸控筆在接觸過程中的速度與加速度曲線
調整形變云圖與三個曲線的位置,按照之前的方法保存動畫云圖和曲線。可以看到觸控筆剛接觸到pad時,速度達到峰值;而在筆完全接觸pad時電磁力和加速度達到峰值
-關閉后處理軟件,彈出保存結果窗口,點擊save,*.dfnps文件(結果文件)自動存放在之前定義的文件保存路徑中
-如想打開之前的solution文件,點擊軟件左上角 →load,在彈出的窗口中選擇要導入的solution文件
不同工況下的仿真對比
-增加筆與pad之間的距離。在模型列表中選擇pen_body,點擊home→object control→translate,點擊“-Y”并輸入15,點擊右側的apply,觸控筆沿Y軸負方向移動15mm
-Motion與Maxwell中筆與pad增加了距離
-由于距離增加,永磁體的磁力不足以吸引觸控筆到pad上,電磁力為0
-更改矯頑力后,繪制觸控筆在接觸過程中的電磁力、速度與加速曲線。可以看出增加矯頑力后,在接觸過程中,電磁力、速度與加速度均有大幅增加
總結
Ansys 為永磁體和磁吸結構的分析提供完整的解決方案。Ansys集成了電磁場仿真、機械運動仿真、多物理場和強大的建模功能,幫助客戶優化產品性能。
隨著電子產品的便捷化、“無線”化,磁吸結構在越來越多的產品中得以應用。該仿真教程廣泛適用于各種消費電子產品:筆記本電腦、平板電腦、手機、磁吸鍵盤、智能保護套等。
深圳市優飛迪科技有限公司成立于2010年,是一家專注于產品開發平臺解決方案與物聯網技術開發的國家級高新技術企業。
十多年來,優飛迪科技在數字孿生、工業軟件尤其仿真技術、物聯網技術開發等領域積累了豐富的經驗,并在這些領域擁有數十項獨立自主的知識產權。同時,優飛迪科技也與國際和國內的主要頭部工業軟件廠商建立了戰略合作關系,能夠為客戶提供完整的產品開發平臺解決方案。
優飛迪科技技術團隊實力雄厚,主要成員均來自于國內外頂尖學府、并在相關領域有豐富的工作經驗,能為客戶提供“全心U+端到端服務”。



























