



光刻技術第10期 | 矢量OPC的優化算法 
04/考慮工藝變化的像質評價函數梯度考慮光刻系統的離焦、曝光量變化等因素,像質評價函數梯度為“理想焦面梯度”與“離焦面梯度”的加權和(通過加權因子調節兩者占比)。其中,理想焦面與離焦面的梯度求解,均基于電場強度分量的卷積運算,并可通過“電場緩存技術(EFCT)”、FT替代卷積”等方法加速計算。
2411
武漢二元 ??? 4月前
光刻技術第19期 | 非線性壓縮感知光源-掩模優化的數學模型 
最終的總目標函數,是“下采樣后的基礎目標函數”與“這兩類罰函數的加權和”——通過調節罰函數的權重因子,可靈活平衡“圖形匹配精度”與“掩模制造復雜度”。
870
武漢二元 ??? 2月前
光刻技術第11期 | 矢量OPC數值計算與分析1 
光刻系統為照明波長193nm、NA=1.2的浸沒式光刻系統采用相干因子為σ=0.12的圓形照明,對垂直線條采用Y偏振照明,對水平線條采用X偏振照明,掩模為AItPSM型PSM。為了驗證WP罰函數在降低掩模復雜度方面的作用,在OPC的優化損失函數中分別加入傳統WP和GWP兩種罰函數項,并對比PSM的OPC優化結果,分析WP和GWP在降低掩模復雜度和提高成像質量方面的性能。
1113
武漢二元 ??? 4月前
VirtualLab:具有連續調制光柵區域的光波導化 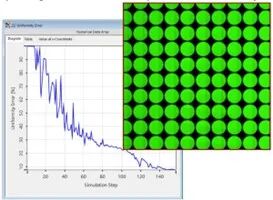
根據可用的效率調制范圍選擇填充因子的初始范圍。更多信息可參見: 光柵分析和在波導上的平滑調制光柵參數 初始系統的生成 ? 具有所謂光柵參數調制功能的光波導設置由步跡和光柵分析工具生成(包括光柵特性)。 ? Uniformity Detector 用于定義優化的評價函數。
2263
追光ing ??? 2年前
空間光調制器像素處光衍射的仿真 
? 內置的SLM模式可以實現從簡單透射函數到包含像素和間隔的陣列的自動轉換。 2. VirtualLab的SLM模塊? 為設置像素陣列,必須輸入像素陣列尺寸和區域填充因子。? 必須設置所設計的SLM透射函數。因此,需要輸入文件SLM_Transmission_Function.ca2的路徑。 3.
2007
追光ing ??? 3年前
LS-DYNA | 網格穿透實用解決方法 
圖 SLSFAC=0.1、TSSFAC=0.9、ELEMENT SIZE=0.05方法1:修改*CONTROL_CONTACT滑移界面罰函數數值 保持TSSFAC=0.9、網格尺寸為0.05cm不變,滑移界面罰函數SLSFAC的值分別取1、2、3、5,侵徹過程中網格穿透情況如下。
7766 19 3
陳興 ??? 3年前
Ansys Zemax | 在OpticStudio中通過幾何光線追跡來模擬楊氏雙縫干涉實驗 
照射孔隙的光的相干因子 μ12 是由光源大小、光源的空間相干函數和光源到孔隙平面的傳播距離組成的函數。除了假設光源是完全非相干的(有 δ 函數的空間相干性),我們也將光源限制為準單色,也就是說光有足夠的窄的帶寬,使得跨光線的波前波陣面遇到的任何相對路徑長度差異均,比時間相干長度c/Δν更短,這樣便只用考慮空間相干效應。
2362
宇熠科技 ??? 6月前
AR&MR VirtualLab:具有連續調制光柵區域的光波導化 
根據可用的效率調制范圍選擇填充因子的初始范圍。更多信息可參見: 光柵分析和在波導上的平滑調制光柵參數 初始系統的生成 ? 具有所謂光柵參數調制功能的光波導設置由步跡和光柵分析工具生成(包括光柵特性)。 ? Uniformity Detector 用于定義優化的評價函數。
2365 1
追光ing ??? 3年前
整流罩地面分離過程仿真 
3) 設置相互作用 對接觸性質進行編輯(見圖12),選擇罰函數定義切向行為,其中Friction Coeff為罰剛度系數,僅取決于材料特性。在通用接觸中定義相互作用,賦予接觸性質,關鍵是定義相互接觸面(見圖13)。對于固體結構,接觸面為整流罩半罩蒙皮外表面,類型為幾何;對于流體材料,接觸面為整體,類型為網格(見圖14)。
2787
力學AI有限元 ??? 1年前
ZEMAX | 在OpticStudio中通過幾何光線追跡來模擬楊氏雙縫干涉實驗 
照射孔隙的光的相干因子 μ12 是由光源大小、光源的空間相干函數和光源到孔隙平面的傳播距離組成的函數。除了假設光源是完全非相干的(有 δ 函數的空間相干性),我們也將光源限制為準單色,也就是說光有足夠的窄的帶寬,使得跨光線的波前波陣面遇到的任何相對路徑長度差異均,比時間相干長度c/Δν更短,這樣便只用考慮空間相干效應。
2122
宇熠科技 ??? 3年前
ANSYS Workbench起重機疲勞分析 
每個單元的物理場函數由簡單的場函數組成,這些場函數僅依賴于有限個節點參數。當這些單元場函數組合在一起時,它們能夠近似表示整個連續體的物理場函數。</p><p>最終,通過求解由能量原理和加權殘差法導出的代數方程組,獲得了有限元法的數值解。這個解是對原始連續體問題的近似,其精度取決于網格剖分的細密程度和所采用的插值函數的類型。
4128 3 2
力學AI有限元 ??? 12月前
FLUENT 動網格模型(下) 
選擇 Remeshing時,Options選項中有尺寸函數、必須改善扭曲、面重劃分(僅對三維)3 個選項,其中,最小長度、最大長度比例及最大單元扭曲必須設定,而當采用尺寸函數時,還需要設置尺寸函數求解、尺寸函數的變化率等參數,如圖6所示。
4047 1 1
網格大師 ??? 2年前
基于拓撲優化的壓縮機支架輕量化分析 
造成上述現象的原因除了優化參數設置問題外,網格尺寸和懲罰因子的設置也均會對上述現象產生重要影響[13~15]。2.2 網格尺寸的影響拓撲優化區域采用不同尺寸的網格,優化的結果也各不相同的現象,稱為網格依賴癥。
6122 9
張偉一 ??? 2年前
VirtualLab:具有連續調制光柵區域的光波導優化 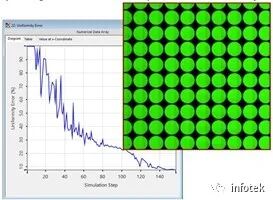
根據可用的效率調制范圍選擇填充因子的初始范圍。更多信息可參見: 光柵分析和在光波導上的平滑調制光柵參數 初始系統的生成 ? 具有所謂光柵參數調制功能的光波導設置由足跡和光柵分析工具生成(包括光柵特性)。 ? Uniformity Detector 用于定義優化的評價函數。
2431
追光ing ??? 1年前
VirtualLab:具有連續調制光柵區域的光波導化 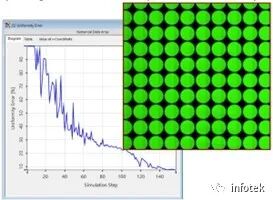
優化設置-選擇參數 ? 分別為EPE 和耦出光柵選擇調制開始和結束位置的填充因子值。? 根據調制功能編輯器中的設置自動填充初始值。優化設置 - 指定約束? 定義變量的可用范圍(此處:EPE 和外耦合器的填充系數)。? 為了實現低均勻性誤差和可接受的強度分布,將均勻性誤差的目標值設置為 0%,并指定算術平均值的目標值。
2397
追光ing ??? 1年前
VirtualLab:具有連續調制光柵區域的光波導優化
根據可用的效率調制范圍選擇填充因子的初始范圍。更多信息可參見: 光柵分析和在光波導上的平滑調制光柵參數 初始系統的生成 ? 具有所謂光柵參數調制功能的光波導設置由足跡和光柵分析工具生成(包括光柵特性)。 ? Uniformity Detector 用于定義優化的評價函數。
2230
追光ing ??? 1年前
contact的soft如何選擇 
LS-DYNA 程序中, 罰函數法 用于 接觸力 的計算。
2694 1
OnTheWay08 ??? 10月前
Recurdyn接觸特征參數含義 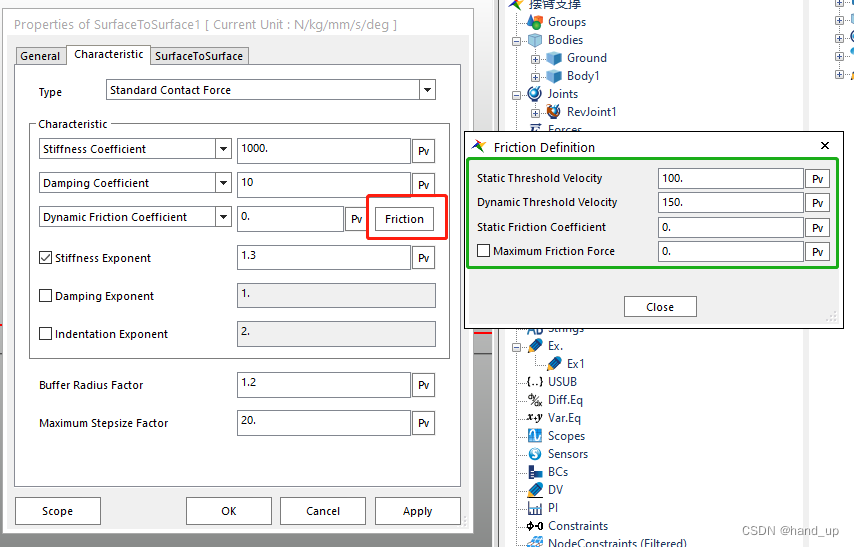
原理如下 當實際穿透值小于設定邊界穿透值時,阻尼系數按STEP函數計算;否則,阻尼系數為用戶指定值 2.Max Penetration: 設置最大的穿透深度,當計算接觸過程中,實際穿透值小于這個值時,程序計算接觸力,當實際穿透值大于這個值時,程序不計算接觸力,即接觸穿透,這時接觸失效。
4447 2
CAE仿真學習菌 ??? 2年前
參數優化文檔介紹 
?3.定義全局優化的設置 3.定義全局優化的設置 *結果列表可能會列出更多的迭代;這源于這樣一個事實,即一些優化算法也會顯示中間函數結果。 **根據經驗,可以設置一個最大公差值,該值比初始目標函數值小約4-5個數量級。
2315
追光ing ??? 1年前
基于多工況加權柔度響應的汽車控制臂拓撲優化 
如圖3所示:圖3 加權柔度響應設置5. 設置優化參數:· 目標體積分數:設置為0.3(即最終材料用量為設計空間的30%),設置如圖4所示。圖4 體積分數約束設置· 優化目標:以最小柔度作為優化目標,設置如圖5所示。圖5 優化最小柔度設置· 懲罰因子p:通常為3。
727
320科技工作室 ??? 6天前
20條/頁 
 11
11 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
