




設(shè)計仿真 | Adams聯(lián)合仿真相關(guān)介紹 
Part2Adams端聯(lián)合仿真01Adams端聯(lián)合仿真Adams與其他軟件Co-sim的一般流程如下圖所示。圖4 聯(lián)合仿真數(shù)據(jù)流Adams端需要實現(xiàn)的功能有:(1)將位移輸出至output_xls,供其他軟件調(diào)用;(2)使用gforce引用input_xls中的數(shù)據(jù)。
3013 2
海克斯康設(shè)計與仿真 ??? 1年前
設(shè)計仿真 | Adams 與 Matlab 通過 FMI 聯(lián)合仿真 
既然是聯(lián)合仿真,那么同樣可以在Adams中查看結(jié)果。為此,需要首先找到聯(lián)合仿真的計算結(jié)果,然后導(dǎo)入Adams中,在其后處理環(huán)境中進行查看。由于不同軟件的設(shè)置不同,聯(lián)合仿真結(jié)果存放的位置也是不同的,甚至有些軟件基于FMI聯(lián)合仿真后,其聯(lián)合仿真的結(jié)果僅在聯(lián)合仿真過程中存在臨時文件中,一旦仿真終止,其結(jié)果也會刪除。
2706
海克斯康設(shè)計與仿真 ??? 1年前
案例 | Adams-EDEM聯(lián)合仿真預(yù)測軟土上軍事車輛的機動性 
Adams-EDEM 土壤特性與 Bekker-Wong 參數(shù)的一致性 Adams 多體動力學(xué)車輛與 EDEM 離散元土壤模型聯(lián)合仿真的流程,將既定程序引入到一個新的維度,以驗證離散元土壤特性。整個解決方案在離散元環(huán)境中執(zhí)行時,力 / 位移相互作用全部在內(nèi)部計算。借助 Adams-EDEM 聯(lián)合仿真,每個軟件求解各自的方程,在既定的通信間隔交流位移和力。
3035 1 1
Cruise ??? 3年前
Adams聯(lián)合仿真相關(guān)介紹 
簡介 Adams作為多體動力學(xué)分析的標桿軟件,擁有廣泛的用戶基礎(chǔ),并由此衍生了廣泛的用戶需求。其中聯(lián)合仿真(多學(xué)科仿真)便是最突出的需求。 Adams與其他學(xué)科軟件進行聯(lián)合仿真的過程中,Adams一般提供部件的位移、速度或者加速度信息,其他學(xué)科軟件提供外部力信息施加至Adams中。
3531 4 3
peaky ??? 3年前
案例 | Adams-Marc聯(lián)合仿真幫助三星獲得設(shè)計見解 
Adams-Marc聯(lián)合仿真 我們運用Adams-Marc聯(lián)合仿真功能,將幾何和材料非線性結(jié)構(gòu)行為包括在多體動力學(xué)(MBD)仿真中。任何Adams模型和Marc模型都可以與該工具一起使用。后處理是分開進行的,Adams結(jié)果在Adams的后處理器中完成,Marc結(jié)果在Marc的后處理器中完成。MBD解決方案(如Adams)和非線性FEA模型(如Marc)之間的聯(lián)合仿真提供了許多優(yōu)勢。
2377
Cruise ??? 3年前
案例 | 使用Adams-Marc聯(lián)合仿真模擬車輛的極端負載工況 
由 Adams&Marc 完成的寶馬汽車柱樁碾過 聯(lián)合仿真圖片,CEI Ensight 進行可視化處理 綜上所述,借助 Adams-Marc 聯(lián)合仿真方法,汽車 OEM 工程師和 MSC 能夠在一天之內(nèi)找到物理測試結(jié)果與仿真結(jié)果之間的良好關(guān)聯(lián)性,結(jié)果表明,該聯(lián)合仿真技術(shù)能夠準確有效地預(yù)測車輛在極端工況下的動態(tài)載荷。
2730
Cruise ??? 3年前
基于Adams、AMESim、Simulink、Hypermesh、Ansys和Nastran仿真 

、基于Adams、Amesim和Simulink的聯(lián)合仿真設(shè)置、基于Adams、Amesim和Simulink的聯(lián)合仿真實例(單個機械臂)、基于Adams、Amesim和Simulink的聯(lián)合仿真實例(三個機械臂)、基于Amesim、VS和Simulink的三者聯(lián)合仿真實例、Hypermesh和OptiStruct行走機器人右小腿柔性體的生成;Hypermesh和Nastran行走機器人右小腿柔性體的生成
163 3
Crisby_Vectory_TrHo ??? 7年前
設(shè)計仿真 | Adams-Marc聯(lián)合仿真助力萊頓汽車集團提升仿真計算效率 
在扭矩調(diào)制器的殼體和彈簧之間建立了六個接觸點,Adams使用這些接觸點向Marc提供位移數(shù)據(jù),Marc使用這些接觸點將力提供給Adams。在這個仿真流程中,使用Adams-Marc聯(lián)合仿真分析扭矩調(diào)制器僅花費了兩個小時,這是Marc單獨仿真所需時間的1/15。
2299 1
海克斯康設(shè)計與仿真 ??? 2年前
Adams-Marc聯(lián)合仿真助力萊頓汽車集團提升仿真計算效率 
在扭矩調(diào)制器的殼體和彈簧之間建立了六個接觸點,Adams使用這些接觸點向Marc提供位移數(shù)據(jù),Marc使用這些接觸點將力提供給Adams。在這個仿真流程中,使用Adams-Marc聯(lián)合仿真分析扭矩調(diào)制器僅花費了兩個小時,這是Marc單獨仿真所需時間的1/15。
2549
Cruise ??? 2年前
設(shè)計仿真 | Adams FMI聯(lián)合仿真助力福特汽車優(yōu)化燃油經(jīng)濟性和NVH性能 
動力傳動系模型 Adams與AMESim FMI聯(lián)合仿真 Adams FMI支持將Matlab或Easy5的Adams控制聯(lián)合仿真擴展到所有使用FMI聯(lián)合仿真標準的軟件。
2428
海克斯康設(shè)計與仿真 ??? 3年前
Adams FMI聯(lián)合仿真助力福特汽車優(yōu)化燃油經(jīng)濟性和NVH性能 
Adams FMI支持將Matlab或Easy5的Adams控制聯(lián)合仿真擴展到所有使用FMI聯(lián)合仿真標準的軟件。在這種情況下,福特的工程師使用Adams 3D傳動系統(tǒng)和整車模型作為聯(lián)合仿真主模型,使用AMESim1D變矩器滑移控制器模型作為聯(lián)合仿真從模型,目標是優(yōu)化變矩器滑移,以滿足車輛的拖載NVH目標,同時最大限度地提高燃油經(jīng)濟性。
2616
Cruise ??? 3年前
ADAMS和AMESim聯(lián)合仿真時,ADAMS中液壓缸抖動?
ADAMS和AMESim聯(lián)合仿真時,ADAMS中液壓缸抖動?
2536 1
小小酥1 ??? 3年前
Isight集成ADAMS/CAR進行多工況聯(lián)合參數(shù)優(yōu)化實例 
借此幾乎,將“Isight集成ADAMS/CAR進行多工況聯(lián)合參數(shù)DOE或opti”以實例的形式呈現(xiàn)。希望對有需要的朋友,有所幫助。1、 選取DOE參數(shù)試驗的Objective選取參數(shù)過程,需要跟工程實際結(jié)合。這里僅以最大轉(zhuǎn)向角、最大前束角作為Objective。
2320 1
歡樂多??π ??? 9月前
Adams與Matlab聯(lián)合仿真示例 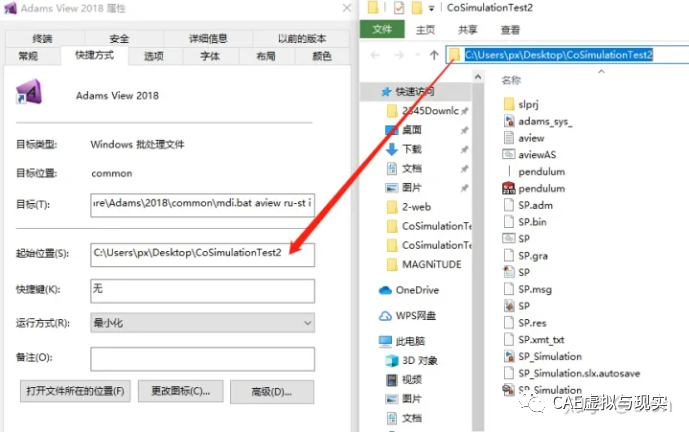
至此,通過Matlab和Adams聯(lián)合仿真的步驟就已經(jīng)全部實現(xiàn),剩下的細節(jié)就需要大家不斷摸索啦。 文章來源:CAE虛擬與現(xiàn)實
3575 3 2
仿真客 ??? 3年前
基于hypermesh與ansys apdl的聯(lián)合仿真——如何建立運動副 
最近重點學(xué)習了一下這方面的內(nèi)容,談?wù)勎业母邢耄?.使用hypermesh去建立運動副相比于workbench來說操作上的繁瑣程度高了不止一點,所以其實不是很懂學(xué)這個的意義在哪里;2.唯一覺得可能有用的在于后續(xù)去在dyna聯(lián)合仿真中去建立運動副有一定的參考意義,再者就是apdl本身在后處理方面的批量化于實時性的反饋比較好,這是我個人的理解;3.最后說說瑕疵吧,我用的hypermesh
3819 28 9
仿真學(xué)習cae ??? 1年前
設(shè)計仿真 | Adams FMI聯(lián)合仿真助力福特汽車優(yōu)化燃油經(jīng)濟性和NVH性能 
動力傳動系模型 Adams與AMESim FMI聯(lián)合仿真 Adams FMI支持將Matlab或Easy5的Adams控制聯(lián)合仿真擴展到所有使用FMI聯(lián)合仿真標準的軟件。
4193 1
萬有引力LYQ ??? 2年前
設(shè)計仿真 | Adams-Marc聯(lián)合仿真幫助客戶準確模擬車門關(guān)閉過程 
工程師使用Adams的試驗設(shè)計模塊進行分析,用來確定關(guān)門的速度最小為820 mm/s。 Marc密封條模型 Adams車門模型Marc密封條的壓縮載荷Bias工程師隨后做了進一步研究,使用Adams-Marc聯(lián)合仿真功能,通過實時計算密封件的載荷和變形來提高仿真精度,而不是依賴于CLD提供的近似值。這個聯(lián)合仿真被認為是第一個模擬車門動態(tài)關(guān)閉的聯(lián)合仿真方案。
2395 1
海克斯康設(shè)計與仿真 ??? 1年前
設(shè)計仿真 | 直播預(yù)告-Romax & Adams 聯(lián)合仿真:提取動力總成載荷用于零部件耐久分析 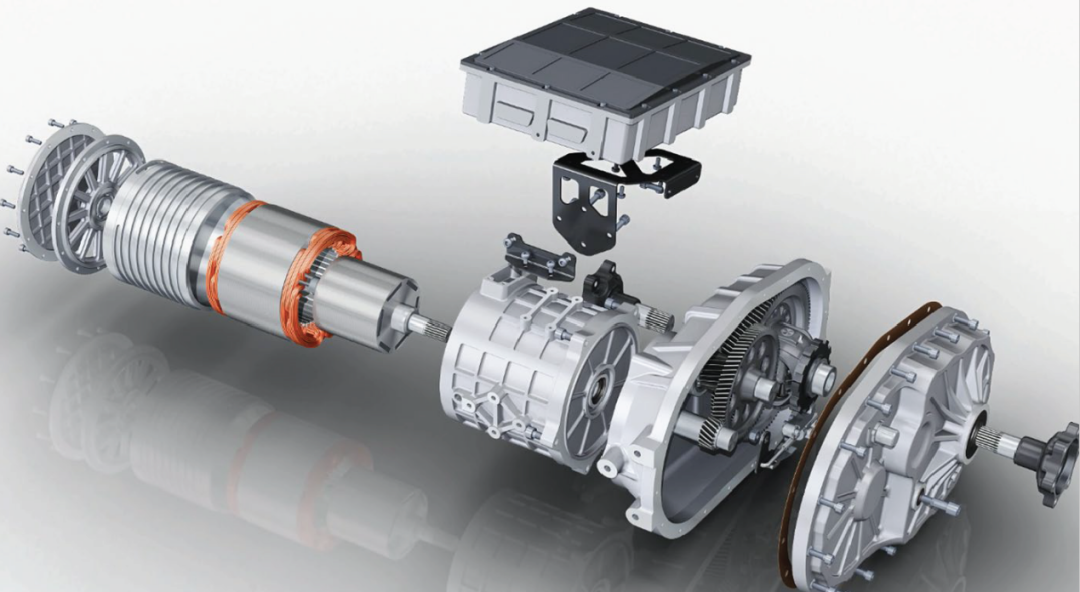
海克斯康工業(yè)軟件旗下Adams多體動力學(xué)仿真軟件可以對車輛進行各種路況和工況的仿真研究,提取傳動系統(tǒng)的載荷輸入的波動信息;Romax傳動系統(tǒng)仿真平臺可導(dǎo)入Adams獲取的載荷信息,進而準確詳細的校核齒輪、軸承和軸等關(guān)鍵零部件的耐久性。 本期直播將與大家分享通過Adams和Romax的聯(lián)合仿真為動力總成耐久分析的準確度和便捷性提供的新的方法。
2382
海克斯康設(shè)計與仿真 ??? 2年前
LS-DYNA SPH聚能射流侵徹混凝土靶 SolidWorks/HyperMesh聯(lián)合仿真 
本案例采用SolidWorks+HyperMesh+LS-DYNA對聚能射流侵徹混凝土靶板進行聯(lián)合仿真。 首先使用SolidWorks對炸藥、藥性罩和靶板進行幾何建模,生成step文件。 下一步將step文件導(dǎo)入HyperMesh進行SPH粒子填充,并生成K文件。
4896 7
LYH333 ??? 2年前
20條/頁 
 15
15 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
