



46基于matlab的模擬退火算法(SA)優(yōu)化車輛路徑問題(VRP) 
基于matlab的模擬退火算法(SA)優(yōu)化車輛路徑問題(VRP),在位置已知的條件下,確定車輛到各個指定位置的行程路線圖,使得路徑最短,運輸成本最低。一個位置由一臺車服務(wù),且始于起點,返回起點,程序已調(diào)通,可直接運行。
2247
matlab應(yīng)用與學習 ??? 2年前
1-46基于matlab的模擬退火算法(SA)優(yōu)化車輛路徑問題(VRP) 

基于matlab的模擬退火算法(SA)優(yōu)化車輛路徑問題(VRP),在位置已知的條件下,確定車輛到各個指定位置的行程路線圖,使得路徑最短,運輸成本最低。一個位置由一臺車服務(wù),且始于起點,返回起點。程序已調(diào)通,可直接運行。購買后可下載視頻中的源程序文件。
267
matlab應(yīng)用與學習 ??? 1年前
自動駕駛4WS車輛路徑跟蹤最優(yōu)控制算法仿真 
即使有些控制方法考慮了車輛模型,但大多是基于輪胎小角度假設(shè)建立的,當高速工況下輪胎側(cè)偏角較大輪胎進入非線性區(qū)域時這種控制方法就會喪失穩(wěn)定性,難以實現(xiàn)精確的路徑跟蹤效果。 基于以上自動駕駛4WS車輛的控制難題,本文將基于車輛動力學模型設(shè)計線性時變模型預(yù)測算法,利用其滾動優(yōu)化和反饋校正的特性,來減小路徑跟蹤過程中的誤差。
2484
駕駛哥 ??? 4年前
基于統(tǒng)計能量分析方法的工程車輛駕駛室聲學包優(yōu)化 附統(tǒng)計能量分析原理及其應(yīng)用下載 
統(tǒng)計能量分析方法SEA(Statistical Energy Analysis),已被成功應(yīng)用于車輛的聲學、振動傳遞路徑分析,并可以準確地進行各種結(jié)構(gòu)于車輛的振動、聲學預(yù)測。本文針對某型工程車輛,應(yīng)用統(tǒng)計能量分析方法分析預(yù)測駕駛室司機耳旁噪聲,并對比試驗結(jié)果校核模型。根據(jù)仿真數(shù)據(jù)進行噪聲源分析,確定聲學包優(yōu)化方案,通過仿真與試驗方法確定優(yōu)化效果。
3089 1
知識通 ??? 4年前
77基于matlab的蟻群優(yōu)化路徑算法,二維路徑和三維路徑優(yōu)化 
基于matlab的蟻群優(yōu)化路徑算法,二維路徑和三維路徑優(yōu)化。輸出可視化最優(yōu)路徑和距離迭代曲線。數(shù)據(jù)可更換自己的,程序已調(diào)通,可直接運行。
2214
matlab應(yīng)用與學習 ??? 2年前
如何使用VI-grade的工具鏈優(yōu)化車輛在紐北的性能 
特別是對于一圈長22km的賽道,優(yōu)化步長的選取問題也會出現(xiàn)。我們在構(gòu)建優(yōu)化的模型時,需要去優(yōu)化路線和車輛模型的輸入,對于路線,1m作為優(yōu)化步長其實已經(jīng)比較小了,22km的賽道就有22000個節(jié)點,我們需要對22000個節(jié)點逐個計算,最終找到最優(yōu)的一條路線。
2921 1 2
VI-grade中國 ??? 1年前
純電驅(qū)動車輛動力總成的優(yōu)化與比較研究 
電池包一次充滿電,需要支持車輛行駛80km距離。因此,對于能耗越低的動力總成拓撲結(jié)構(gòu)而言,除車輛的使用成本會較低外,其電池組部分的制造成本也會相對較小。3 子系統(tǒng)/部件層級優(yōu)化問題 在子系統(tǒng)/部件層級,主要處理驅(qū)動電機的優(yōu)化設(shè)計,使其即滿足車輛驅(qū)動性能的要求,又使得其制造成本最小化。
2977 6 5
天佑有限元 ??? 4年前
分布式制冷壓力傳感器實現(xiàn)能耗最優(yōu)化的路徑? 
分布式制冷壓力傳感器在制冷系統(tǒng)中的應(yīng)用,不僅提升了性能,更為能耗的最優(yōu)化找到了一條清晰的路徑。通過實時數(shù)據(jù)采集、自適應(yīng)控制、智能系統(tǒng)整合、機器學習應(yīng)用以及定期維護,能夠有效提高制冷系統(tǒng)的能源利用效率。這不僅有助于降低運營成本,更在全球節(jié)能減排的背景下,貢獻了重要的力量。
823
博揚智能 ??? 2月前
論文推薦丨常浩等:基于有限元仿真技術(shù)的軌道車輛錐形彈簧的結(jié)構(gòu)優(yōu)化研究 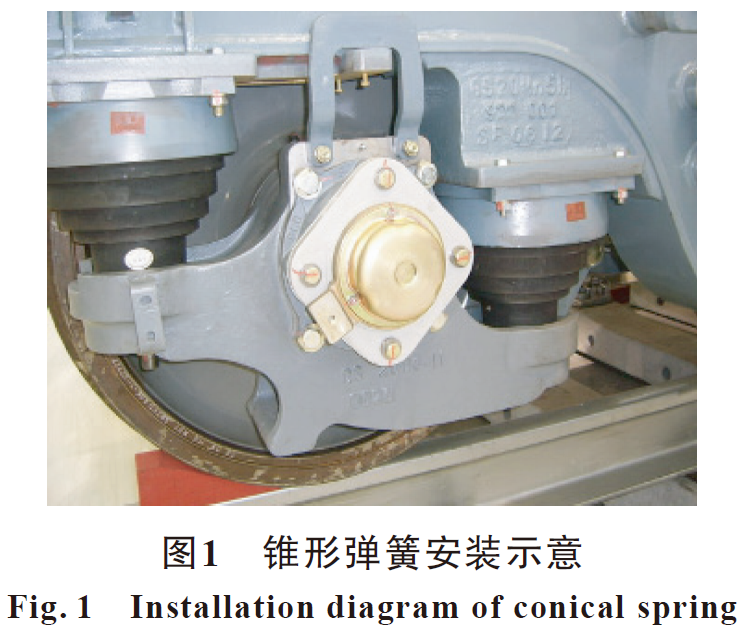
基于有限元仿真技術(shù)的軌道車輛錐形彈簧的結(jié)構(gòu)優(yōu)化研究 常 浩1,張 楊1,程海濤2,葛 琪2 (1. 湖南安全技術(shù)職業(yè)學院;2.
5041 4
泡沫oO ??? 2年前
生產(chǎn)制造 | SMIRT自動優(yōu)化DieNC 銑床頁面路徑中的共線點 
03共線點移除優(yōu)化刀具路徑精度背 景:在刀具路徑規(guī)劃中,過多的共線點可能會引入計算誤差。由于數(shù)控系統(tǒng)在處理刀具路徑時是基于離散的點來計算刀具位置的,多余的共線點會增加計算的復(fù)雜性。解 釋:移除共線點后,刀具路徑的數(shù)學描述更加簡潔和準確。這有助于提高加工精度,因為數(shù)控系統(tǒng)可以更準確地按照優(yōu)化后的路徑控制刀具運動。
2091
海克斯康設(shè)計與仿真 ??? 1年前
Simufact助力愛達克集團實現(xiàn)復(fù)雜車輛組件的變形優(yōu)化 
Simufact Welding為工程問題提供了最優(yōu)解決方案,通過焊接仿真優(yōu)化重型拖拉機耦合爪形交叉構(gòu)件的變形。聯(lián)軸器顎叉構(gòu)件的總變形結(jié)果該仿真的項目結(jié)果表明,Simufact Welding可以用來預(yù)測臨界偏差所需的最終尺寸,并優(yōu)化結(jié)果。
1941
上海庭田信息科技有限公司 ??? 3年前
【技術(shù)貼】AVL VSM+DRIVE+CAMEO車輛駕駛性優(yōu)化工具鏈介紹 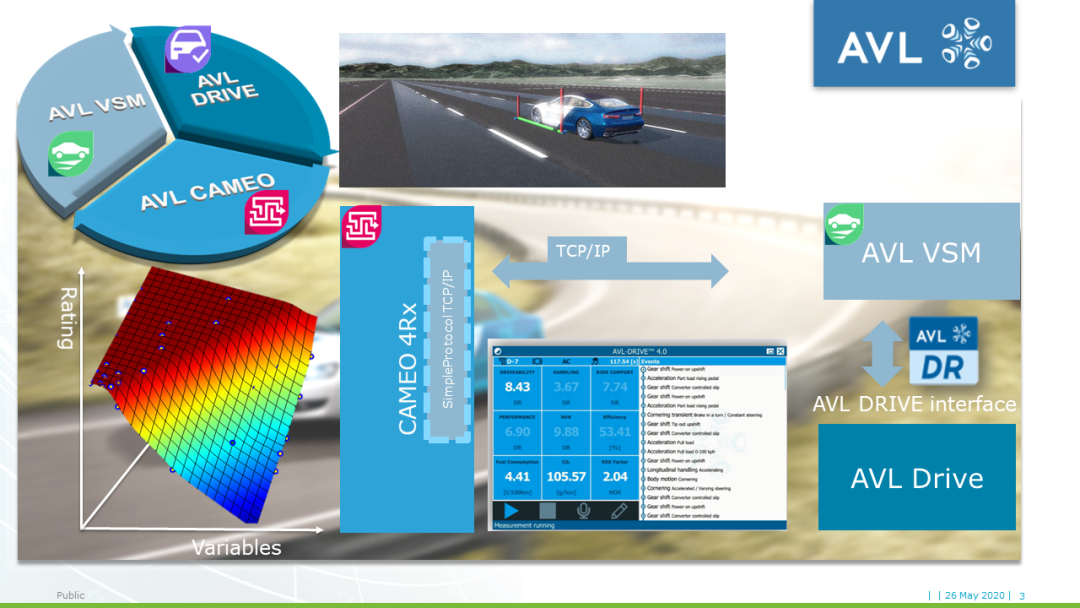
隨著車輛開發(fā)更加注重短周期和低成本,在前期對車輛駕駛性進行預(yù)測的需求日益增強。而開展駕駛性仿真的基本目標之一是通過駕駛性虛擬仿真指導整車參數(shù)選型,也就是通過整車參數(shù)優(yōu)化在前期改善車輛駕駛性表現(xiàn)。AVL致力于通過開發(fā)任務(wù)的前置(frontloading)來縮短開發(fā)周期,節(jié)省開發(fā)成本。
4193 2
AVL先進模擬技術(shù) ??? 3年前
【超詳細】Simpack與Isight聯(lián)合仿真 ——以車輛懸掛優(yōu)化為例 
1 前言Simpack是作為一款大型多體動力學分析軟件,尤其在車輛方面應(yīng)用廣泛。在實際運用中,往往需要對模型進行參數(shù)化研究或者優(yōu)化設(shè)計,采用手動迭代的計算方法費時費力效率低下。結(jié)合諸如Isight等優(yōu)化平臺,建立自動的優(yōu)化分析流程,可以大大提高優(yōu)化計算的效率,縮短產(chǎn)品的設(shè)計周期。
4647 3 6
Qiudouyu ??? 3年前
無人駕駛車輛MPC局部路徑規(guī)劃+軌跡跟蹤全集 
無人駕駛車輛局部路徑規(guī)劃+軌跡跟蹤Carsim配置流程+代碼講解。
1782
愛足球的技術(shù)宅 ??? 4年前
1-77基于matlab的蟻群優(yōu)化路徑算法 
基于matlab的蟻群優(yōu)化路徑算法,二維路徑和三維路徑優(yōu)化。輸出可視化最優(yōu)路徑和距離迭代曲線。數(shù)據(jù)可更換自己的,程序已調(diào)通,可直接運行。購買后可下載視頻中的源程序文件。
235
matlab應(yīng)用與學習 ??? 1年前
Simufact助力愛達克集團實現(xiàn)復(fù)雜車輛組件的變形優(yōu)化 
√ Simufact Welding為工程問題提供了最優(yōu)解決方案,通過焊接仿真優(yōu)化重型拖拉機耦合爪形交叉構(gòu)件的變形。結(jié)果該仿真的項目結(jié)果表明,#可以用來預(yù)測臨界偏差所需的最終尺寸,并優(yōu)化結(jié)果。#Simufact Welding #工業(yè)軟件 #仿真工程師 #仿真軟件
2222
庭田科技 ??? 1年前
1-89基于matlab的人工蜂群和粒子群混合優(yōu)化的路徑規(guī)劃算法 
基于matlab的人工蜂群和粒子群混合優(yōu)化的路徑規(guī)劃算法,起點和終點確定的前提下,在障礙物中尋找最佳路徑。數(shù)據(jù)可更換自己的,程序已調(diào)通,可直接運行。購買后可下載視頻中的源程序文件。
241
matlab應(yīng)用與學習 ??? 1年前
某純電動汽車驅(qū)動系統(tǒng)24階振動噪聲的分析與優(yōu)化 
在整車控制器發(fā)送給電機控制器使能指令后即給定5Nm的預(yù)置扭矩,讓驅(qū)動電機發(fā)出扭力,消除傳動系統(tǒng)花鍵、齒輪的嚙合間隙,消除了車輛由靜止到行駛的轉(zhuǎn)速沖擊,車輛進入預(yù)備狀態(tài) (處于車輛靜止狀態(tài));同時優(yōu)化蠕行工況扭矩階躍梯度,扭矩的增加分兩個階段,在轉(zhuǎn)速上升到60r/min時蠕行扭矩達到最大值35Nm,蠕行工況加速結(jié)束后驅(qū)動電機只需輸出7Nm的力即可使驅(qū)動電機轉(zhuǎn)速穩(wěn)定在384r/min,較優(yōu)化前最高穩(wěn)定轉(zhuǎn)速降低
2912 5 3
聲學仿真初學者 ??? 2年前
某純電動汽車驅(qū)動系統(tǒng)24階振動噪聲的分析與優(yōu)化 
在整車控制器發(fā)送給電機控制器使能指令后即給定5Nm的預(yù)置扭矩,讓驅(qū)動電機發(fā)出扭力,消除傳動系統(tǒng)花鍵、齒輪的嚙合間隙,消除了車輛由靜止到行駛的轉(zhuǎn)速沖擊,車輛進入預(yù)備狀態(tài) (處于車輛靜止狀態(tài));同時優(yōu)化蠕行工況扭矩階躍梯度,扭矩的增加分兩個階段,在轉(zhuǎn)速上升到60r/min時蠕行扭矩達到最大值35Nm,蠕行工況加速結(jié)束后驅(qū)動電機只需輸出7Nm的力即可使驅(qū)動電機轉(zhuǎn)速穩(wěn)定在384r/min,較優(yōu)化前最高穩(wěn)定轉(zhuǎn)速降低
2847 2
EDC電驅(qū)未來 ??? 4年前
CAE在汽車結(jié)構(gòu)及材料優(yōu)化中的仿真分析與應(yīng)用 
其傳力路徑具體表現(xiàn)在以下幾點: 車輛本身和剛性壁障產(chǎn)生碰撞時,一旦其前保險杠產(chǎn)生變形,會將力直接傳遞至上縱梁,然后通過上縱梁傳遞至A柱上端位置,最后直接向后傳遞。 當車輛和剛性壁障產(chǎn)生碰撞時,一旦其前保險杠產(chǎn)生扭曲,會直接將沖撞力轉(zhuǎn)移至前縱梁,然后直接傳輸至A柱下端、門檻梁以及底板縱梁等位置,最后向后傳遞。
3801 6 6
大狼仙 ??? 4年前
20條/頁 
 118
118 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
