



MATLAB/Simulink建模-車輛巡航控制 (1) 
對于這個簡化的模型,我們假設(shè)我們可以直接控制這個力,而忽略產(chǎn)生力的動力系統(tǒng)、輪胎等的動力學(xué)。 由于滾動阻力和風(fēng)阻,阻力 bv 被假定為隨車輛速度 v 線性變化,并且作用在與車輛運動相反的方向上。系統(tǒng)方程有了這些假設(shè),我們就剩下一階質(zhì)量阻尼器系統(tǒng)了。
2700 11 4
AutoEuler ??? 4年前
Adams&Workbench&Matlab四連桿機構(gòu)運動學(xué)分析 
已知四連桿機構(gòu)的相關(guān)參數(shù),通過數(shù)學(xué)公式便可推導(dǎo)出其運動學(xué)模型,并將其運動學(xué)模型利用Matlab語言進(jìn)行編寫,其代碼如圖6所示。
2809
擺渡人張 ??? 2年前
matlab與Adams的機械臂運動學(xué)驗證 
圖3 matlab程序 3、運動學(xué)驗證 運行程序得出初始位置如圖4所示, 圖4 計算的初始位置 Adams中初始位置信息,如圖5所示 圖5 Adams初始位置 改變機械臂的θ值再次進(jìn)行驗證如圖6所示,驗證成功。
2971 1 1
木火柴 ??? 4年前
【綜述】船舶在波浪上縱向運動與控制研究 
2001 年,該團(tuán)隊在通過 CFD 計算船舶水動力系數(shù)的基礎(chǔ)上,建立了波浪、力、運動之間的傳遞函數(shù),使用 Matlab 的 Simulink 模塊對該船的運動與控制進(jìn)行了數(shù)值仿真 [50] ,并通過模型試驗進(jìn)行了驗證 [51] 。
2876 1
海工 ??? 3年前
270 基于matlab的模糊自適應(yīng)PID控制 
基于matlab的模糊自適應(yīng)PID控制,具有10頁報告。傳統(tǒng)PID在對象變化時,控制器的參數(shù)難以自動調(diào)整。將模糊控制與PID控制結(jié)合,利用模糊推理方法實現(xiàn)對PID參數(shù)的在線自整定。使控制器具有較好的自適應(yīng)性。使用MATLAB對系統(tǒng)進(jìn)行仿真,結(jié)果表明系統(tǒng)的動態(tài)性能得到了提高。程序已調(diào)通,可直接運行。
2236
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
YKCAT2 VS 運動控制卡 
實驗需要這些元器件:一個T控制器,一套Servotrnix伺服電機、MVtec Merlic視覺軟件和相應(yīng)的視覺硬件。PC使用相同的配置,只有控制軟件/運動控制卡一個變量,這樣就更便于比較運動控制方案的區(qū)別。
2161
機器視覺產(chǎn)業(yè)聯(lián)盟 ??? 3年前
磁場控制電弧運動 
本文引入一個案例,也是參考他人的云圖結(jié)果進(jìn)行調(diào)試,目的在于理解電弧的運動特性,以及仿真軟件上的操作。電弧運動是受磁場力的作用,即洛倫磁力,所以控制磁場大小和方向就可以控制電弧的運動,磁場條件隨時間而變化,其他設(shè)置和以前保持一致,其中更改網(wǎng)格設(shè)置和求解器設(shè)置,可是結(jié)果順利的收斂;仿真結(jié)果如下所示,電弧隨磁場變化,來回的擺動;#僅供參考
2102 1 2
lnw_2807 ??? 2年前
58基于matlab的采樣的運動規(guī)劃算法-RRT 
基于matlab的采樣的運動規(guī)劃算法-RRT(Rapidly-exploring Random Trees),3D和2D,原始的RRT算法中將搜索的起點位置作為根節(jié)點,然后通過隨機采樣增加葉子節(jié)點的方式,生成一個隨機擴展樹,當(dāng)隨機樹的葉子節(jié)點進(jìn)入目標(biāo)區(qū)域,就得到了從起點位置到目標(biāo)位置的路徑。程序已調(diào)通,可直接運行。
2110
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
MS35541完美替代TMC5041 雙驅(qū)運動控制步進(jìn)芯片 靜音高效 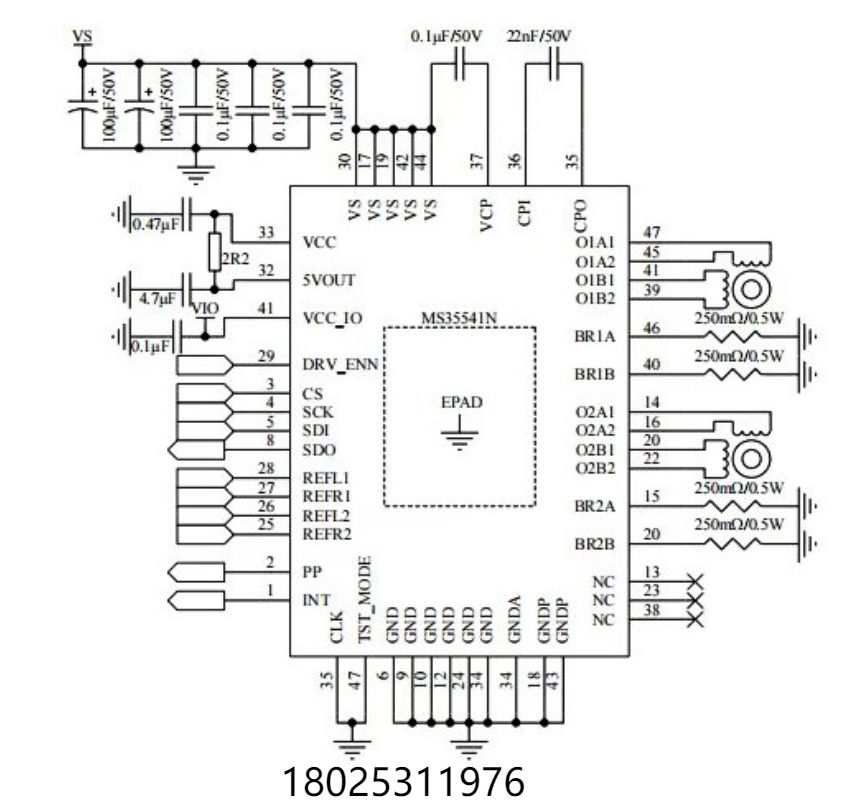
超靜音兩相步進(jìn)電機驅(qū)動芯片—MS35541這款高集成度芯片不僅延續(xù)了家族優(yōu)異的靜音和運動控制性能,更實現(xiàn)了單芯片同時驅(qū)動兩個步進(jìn)電機,支持獨立配置與運動控制,為多軸應(yīng)用帶來更簡潔、高效的解決方案。
2184
用戶_122856 ??? 8月前
運動控制器與PLC的本質(zhì)區(qū)別,你知道嗎? 
所以,點位運動控制器往往具有在線可變控制參數(shù)和可變加減速曲線的能力。 連續(xù)軌跡運動控制:該控制又稱為輪廓控制,主要應(yīng)用在傳統(tǒng)的數(shù)控系統(tǒng)、切割系統(tǒng)的運動輪廓控制。相應(yīng)的運動控制器要解決的題目是如何使系統(tǒng)在高速運動的情況下,既要保證系統(tǒng)加工的輪廓精度,還要保證刀具沿輪廓運動時的切向速度的恒定。對小線段加工時,有多段程序預(yù)處理功能。
2234
非標(biāo)機械論壇 ??? 4年前

matlab-abaqus主動控制?
如何利用Aabaqus聯(lián)動matlab實現(xiàn)結(jié)構(gòu)的一個主動控制呢?有償解決的,謝謝,可以交流一下嗎?
2227 1
LEthan ??? 2年前
Matlab機械連桿機構(gòu)運動學(xué)仿真:包含三桿滑塊機構(gòu)\四桿\六桿 

詳細(xì)介紹了三桿滑塊機構(gòu)和四桿機構(gòu)運動方程的推導(dǎo)及matlab對上述機械連桿機構(gòu)運動仿真,并實現(xiàn)機械連桿機構(gòu)運動動畫的繪制,注:六桿機構(gòu)無公式推導(dǎo)文本,只有代碼。如需模型推導(dǎo)說明文本及matlab源碼,請附件下載。
16
SimPC ??? 3年前
電場可以控制中性粒子的運動嗎? 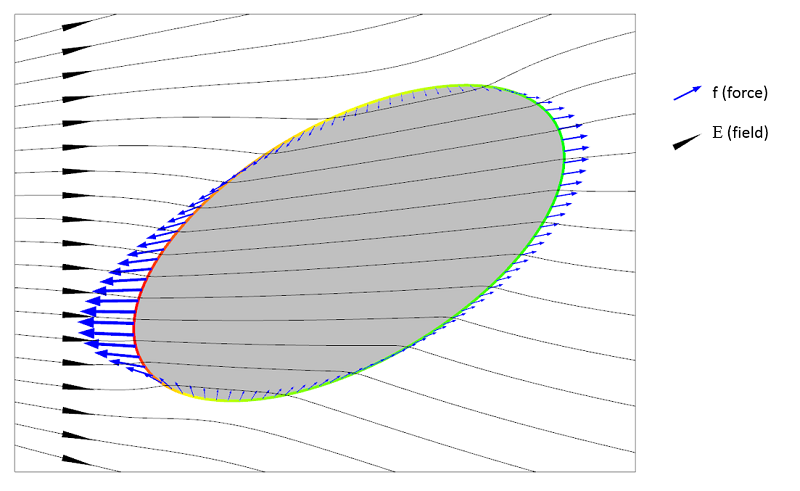
如何用電場控制電中性粒子的運動?這聽起來似乎是不可能的,但在這篇文章中,您會看到介電泳(DEP)現(xiàn)象可以解決這個難題。我們將學(xué)習(xí)如何利用介電泳進(jìn)行顆粒分離,并演示一個簡單的生物醫(yī)學(xué)仿真 App,該 App 是使用 App 開發(fā)器創(chuàng)建的,通過 COMSOL Server? 運行。在非均勻靜電場中粒子所受的力 在直流和交流場中,都會發(fā)生介電泳效應(yīng)。
2684 6 1
我是小能 ??? 3年前
210基于matlab的仿真機械四連桿機構(gòu)運動代碼 
基于matlab的仿真機械四連桿機構(gòu)運動代碼,包括運動仿真和變量變化分析圖的生成,包括角速度、速度、加速度等曲線。程序已調(diào)通,可直接運行。
2296
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
SIMATIC S7-1200運動控制 
一、運動控制方式 S7-1200運動控制根據(jù)連接驅(qū)動方式不同,分成三種控制方式 通信控制方式:S7-1200 PLC通過基于PROFIBUS/PROFINET的PROFIdrive方式與支持PROFIdrive的驅(qū)動器連接,進(jìn)行運動控制。
2853
工控PLC學(xué)習(xí) ??? 4年前
步進(jìn)電機工作原理與運動控制基礎(chǔ)
步進(jìn)運動 步進(jìn)電機的運動是離散的,即每次只轉(zhuǎn)動一個固定的角度,這個角度稱為步距角。步距角的大小取決于電機的設(shè)計和制造精度。通過控制定子磁極的電流方向和大小,可以控制步進(jìn)電機的轉(zhuǎn)動方向和轉(zhuǎn)動角度。 步進(jìn)電機的運動控制基礎(chǔ) 步進(jìn)電機的運動控制主要包括速度控制、位置控制和方向控制。
2589 1
MISUMI米 ??? 2年前
203基于matlab的曲柄滑塊機構(gòu)的運動學(xué)仿真分析GUI 
基于matlab的曲柄滑塊機構(gòu)的運動學(xué)仿真分析GUI,包括《系統(tǒng)仿真與matlab》綜合試題文檔。分析滑塊速度、角速度,曲軸投影長。曲柄滑塊機構(gòu)的動畫。程序已調(diào)通,可直接運行。
2221
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
有愿意給小白進(jìn)行一些MATLAB半主動控制指導(dǎo)的嗎?
MATLAB剛?cè)腴T,想做半主動控制,希望得到一些指導(dǎo)
2171 1
葭月三 ??? 2年前
279 基于matlab的粒子群集法對鐵路電能質(zhì)量控制系統(tǒng)的容量避行優(yōu)化設(shè)計 
基于matlab的粒子群集法對鐵路電能質(zhì)量控制系統(tǒng)的容量避行優(yōu)化設(shè)計。計算出滿足功率因素、電壓不平衡度等電能指標(biāo)的條件下。RPC所需要的補償功率。求得所需最小的系統(tǒng)客量。該設(shè)計能快速計算出符合系統(tǒng)設(shè)定指標(biāo)的各項最優(yōu)補償功率。并通過sumulink份真。檢驗設(shè)計參數(shù)的準(zhǔn)確性。程序已調(diào)通,可直接運行。
2203
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
20條/頁 
 102
102 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
