



39基于matlab的全局路徑規(guī)劃算法中的快速擴(kuò)展隨機(jī)樹RRT路徑規(guī)劃算法及其改進(jìn)方法RRT Sta 
基于matlab的全局路徑規(guī)劃算法中的快速擴(kuò)展隨機(jī)樹RRT路徑規(guī)劃算法及其改進(jìn)方法RRT Star、RRT_Conncet是一種具有狀態(tài)約束的非線性系統(tǒng)生成開環(huán)軌跡的技術(shù),相比于其他算法可以輕松處理障礙物的問題。程序中的各參數(shù)已進(jìn)行詳細(xì)說明,起點(diǎn)坐標(biāo),終點(diǎn)坐標(biāo),步長,迭代數(shù)等均可根據(jù)需求進(jìn)行更改,程序已調(diào)通。
2120
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
58基于matlab的采樣的運(yùn)動(dòng)規(guī)劃算法-RRT 
基于matlab的采樣的運(yùn)動(dòng)規(guī)劃算法-RRT(Rapidly-exploring Random Trees),3D和2D,原始的RRT算法中將搜索的起點(diǎn)位置作為根節(jié)點(diǎn),然后通過隨機(jī)采樣增加葉子節(jié)點(diǎn)的方式,生成一個(gè)隨機(jī)擴(kuò)展樹,當(dāng)隨機(jī)樹的葉子節(jié)點(diǎn)進(jìn)入目標(biāo)區(qū)域,就得到了從起點(diǎn)位置到目標(biāo)位置的路徑。程序已調(diào)通,可直接運(yùn)行。
2110
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
1-39基于matlab的全局路徑規(guī)劃算法中的快速擴(kuò)展隨機(jī)樹RRT路徑規(guī)劃算法及其改進(jìn)方法RRT Star 

基于matlab的全局路徑規(guī)劃算法中的快速擴(kuò)展隨機(jī)樹RRT路徑規(guī)劃算法及其改進(jìn)方法RRT Star、RRT_Conncet是一種具有狀態(tài)約束的非線性系統(tǒng)生成開環(huán)軌跡的技術(shù),相比于其他算法可以輕松處理障礙物的問題。程序中的各參數(shù)已進(jìn)行詳細(xì)說明,起點(diǎn)坐標(biāo),終點(diǎn)坐標(biāo),步長,迭代數(shù)等均可根據(jù)需求進(jìn)行更改,程序已調(diào)通。購買后可下載視頻中的源程序文件。
276
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
1-58基于matlab的采樣的運(yùn)動(dòng)規(guī)劃算法-RRT(Rapidly-exploring Random Trees) 
基于matlab的采樣的運(yùn)動(dòng)規(guī)劃算法-RRT(Rapidly-exploring Random Trees),3D和2D,原始的RRT算法中將搜索的起點(diǎn)位置作為根節(jié)點(diǎn),然后通過隨機(jī)采樣增加葉子節(jié)點(diǎn)的方式,生成一個(gè)隨機(jī)擴(kuò)展樹,當(dāng)隨機(jī)樹的葉子節(jié)點(diǎn)進(jìn)入目標(biāo)區(qū)域,就得到了從起點(diǎn)位置到目標(biāo)位置的路徑。程序已調(diào)通,可直接運(yùn)行。購買后可下載視頻中的源程序文件。
276
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
詳解路徑規(guī)劃算法 
雙向規(guī)劃思想也被采用,衍生出RRTExtExt,RRTExtCon,RRTConCon等多種算法。 基本RRT算法收斂到終點(diǎn)位姿的速度可能比較慢。為了提高算法的效率和性能,需不斷對該算法進(jìn)行改進(jìn)。如為了提高搜索效率采用雙向隨機(jī)搜索樹(Bi~RRT),從起始點(diǎn)和目標(biāo)點(diǎn)并行生成兩棵RRT,直至兩棵樹相遇,算法收斂。
2933 2
駕駛哥 ??? 4年前
自動(dòng)駕駛前沿綜述:基于深度強(qiáng)化學(xué)習(xí)的自動(dòng)駕駛算法 
經(jīng)典運(yùn)動(dòng)計(jì)劃會(huì)忽略環(huán)境動(dòng)態(tài)和差分約束,因此類似于 A* 算法之類的基于 Djisktra 的算法在此問題中并不適用。而快速探索隨機(jī)樹(RRT)通過隨機(jī)采樣和無障礙路徑生成來探索配置空間。目前有多種版本的 RRT 被用于自動(dòng)駕駛管道中的運(yùn)動(dòng)規(guī)劃。2.5 控制(Control)這是最底層的運(yùn)動(dòng)控制,即汽車的加速加速,方向盤的轉(zhuǎn)動(dòng)角度,以及剎車。
2042
木火柴 ??? 4年前
自動(dòng)駕駛決策規(guī)劃中的問題與挑戰(zhàn) 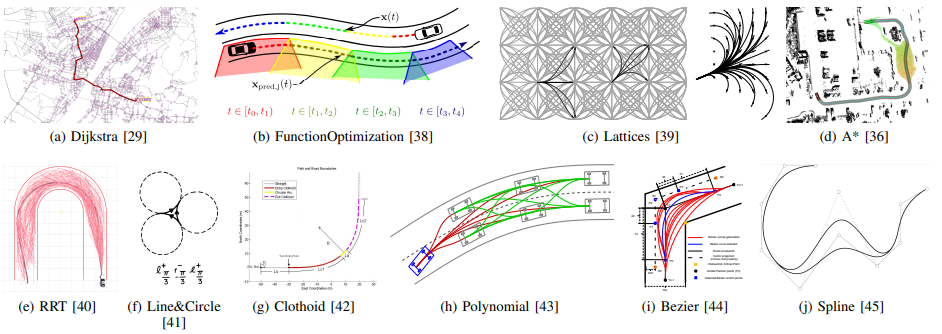
基于采樣搜索的算法:Dijkstra、RRT、A*、hybird A*和Lattice等; 基于曲線插值的算法:RS曲線、Dubins曲線、多項(xiàng)式曲線、貝塞爾曲線和樣條曲線等; 基于最優(yōu)化的算法:Apollo的piecewise-jerk等;上述算法一般都是相互結(jié)合在一起使用的。
1994
芝能汽車 ??? 3年前
自動(dòng)駕駛決策規(guī)劃中的問題與挑戰(zhàn)
基于采樣搜索的算法:Dijkstra、RRT、A*、hybird A*和Lattice等; 基于曲線插值的算法:RS曲線、Dubins曲線、多項(xiàng)式曲線、貝塞爾曲線和樣條曲線等; 基于最優(yōu)化的算法:Apollo的piecewise-jerk等;上述算法一般都是相互結(jié)合在一起使用的。
2213
駕駛哥 ??? 3年前

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
