



基于點云的球銑加工動態仿真 
分離出坯件上被銑削到的弧槽面上點云a(圖6a),并將cad建模得到的網格模型中弧槽部分進行表面采樣得到點云b(圖6b)。計算得到點云a與點云b之間的最大距離為0.32 mm,均方根誤差為0.015,仿真精度較高[24,25]。圖6 仿真點云與CAD建模點云 4 結語本文建立的仿真模型動態地模擬了工件表面球銑時的變化過程,每次步進都產生準確結果,模型可視化且精度高。
4056 5
數控編程網 ??? 2年前
如何獲得CAD點云對象的截面和輪廓?
效果:輪廓誤差 < 2mm,比手動描圖快 10 倍四、工具對比與選擇 方法 適用場景 精度 效率 推薦指數 CAD 內置工具 單點云單截面 ★★★☆ ★★★☆ ★★★★ ReCap
3464
自學土木網 ??? 1年前
CAD怎樣調整點云的顯示樣式 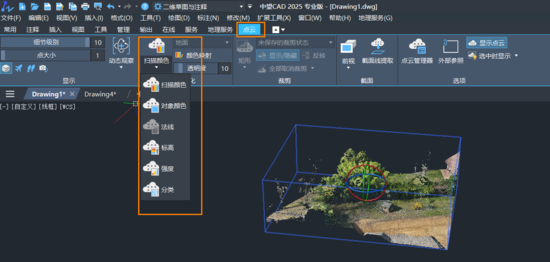
在CAD繪圖工作中,點云數據的顯示樣式設置對于提高工作效率和圖形的可讀性至關重要。合適的顯示樣式不僅能夠讓用戶更清晰地觀察點云的細節特征,還能減輕視覺疲勞,提升整體工作體驗。下面將為大家詳細介紹CAD中設置點云顯示樣式的具體方法和相關技巧。問題描述:針對輸入的點云數據,如何更改其顯示樣式?步驟指引:1.CAD2025及以上版本具有該功能。
2318
自學土木網 ??? 10月前
激光雷達:點云語義分割算法 
下面介紹一個最新的點云全景分割算法,讓我們來看看它是如何顯著降低計算復雜度的。Panoptic-PolarNet[13] 該方法采用BEV下的2D網格來表示數據,這樣可以利用2D卷積提高數據處理效率,高度方向也基本不會有重疊的物體,因此也不會丟失信息。但是,一般的2D網格采用笛卡爾坐標,而該方法中采用極坐標,這樣可以在近距離區域降低量化誤差,提高特征提取能力。
2798
駕駛哥 ??? 4年前
點云文件要怎么處理才能便于可視化輸出?
求助大家,有一個2-3g的點云文件(.pcd),想要用matlab進行可視化輸出,但是一波查閱下來還是不知道要做些什么才能便于matlab處理和輸出,請問大家我需要對這個大的點云文件進行什么操作呢?
2158 1
FEM在路上 ??? 2年前
3D目標檢測/點云/遙感數據集匯總 
鏈接: 點云分類: https://graphics.cs.msu.ru/en/node/922 2. Semantic3D 大規模點云分類基準,它提供了一個帶有大標簽的自然場景的3D點云數據集,總計超過40億個點,8個類別標簽。并且還涵蓋了多種多樣的城市場景。
4322 1 1
駕駛哥 ??? 4年前
衛星/航拍影像/雷達點云實景建模完美配置方案23v1 
時間真快,進入2023年第1季度,計算硬件又開始升級換代,本方案--衛星/無人機影像/LiDAR點云處理應用硬件配置,我們采用intel第13代超頻處理器和nvidia RTX40系列架構,提供最新最快衛星影像3D建模的計算處理硬件方案,從臺式工作站、便攜現場處理工作站、超頻多機集群處理方案。。。
2483
UltraLAB ??? 3年前
abaqus腳本插件104-基于空間點云坐標重構六面體網格節點(2025-10-01) 

abaqus腳本插件104-基于空間點云坐標重構六面體網格節點(2025-10-01)
206
吳永童 ??? 7月前
abaqus腳本插件104-基于空間點云坐標重構六面體網格節點(2025-09-24) 
abaqus腳本插件104-基于空間點云坐標重構六面體網格節點(2025-09-24)
221
吳永童 ??? 8月前
abaqus腳本插件104-基于空間點云坐標重構六面體網格節點生成粗糙表面(2025-11-06) 
abaqus腳本插件104-基于空間點云坐標重構六面體網格節點生成粗糙表面(2025-11-06)
544
吳永童 ??? 6月前
適用于渦輪機械應用的穩健且準確的網格自適應 
在初始用戶生成網格后,該過程完全自動化,使用邊長點云批量運行以驅動適應。請注意,點云根本不需要對應于網格;事實上,它應該是一組完全獨立的點。使用適應點云執行自動網格重新生成所需的增量計算時間是非常值得的。使用細化網格可以解析幾何形狀,提高網格質量,并且近壁區域網格樣式保持一致。
2670
Cadence CFD學習 ??? 2年前
自動駕駛系統的傳感器標定方法 
這個方法無法在室外自然環境中使用,因為點云投影的圖像點很難確定。有三篇關于如何優化激光雷達-攝像頭標定的論文,不是通過3-D點云和圖像點的匹配誤差來估計標定參數,而是直接計算點云在圖像平面形成的深度圖,其和攝像頭獲取的圖像存在全局匹配的測度。不過這些方法,需要大量迭代,最好的做法是根據手眼標定產生初始值為好。
2298
駕駛哥 ??? 3年前
最佳實踐:千巡翼Q30+機載LiDAR在水域三維數據采集中的應用 
測區為長度10公里的帶狀河流,河道最寬處近400米,兩岸村莊房屋較多,植被茂密,測區范圍見下圖: 測區概況成果要求提交成果:真彩色點云、正射影像圖坐標系:CGCS2000,1985高程精度要求:點云精度平面與高程中誤差優于10cm;正射影像圖平面中誤差優于10cm項目工期:2天其他要求:點云地面點密度優于8pt/m2,正射影像圖地面采樣距離優于
2160
千尋位置行業應用 ??? 3年前
探討如何構建端到端高置信度驗證體系? 
(2)光照模型驗證:流程:在真實場景的關鍵位置使用照度計測量光照強度,并與仿真環境中對應點的渲染結果對比。對于人造光源,必須使用其IES文件進行建模。指標:照度(Lux)誤差,目標偏差通常要求低于10-15%。(3)GS/NeRF場景驗證:幾何誤差:使用LiDAR點云作為地面真理,計算重建場景的幾何RMSE。
2858
康謀keymotek ??? 5月前
Matlab如何畫一組誤差的分布圖?
比如,我有1000組實驗數據,又用模型去預測了這1000個點,那么每個點都有一個誤差現在如何用matlab畫出這1000個誤差的分布呢?就是說,橫坐標是誤差值,縱坐標是這些誤差所占的比例。謝謝啦!!!!!!!!!!
1801 1 2
和睦 ??? 3年前
方案分享 | ADAS時空融合數據采集方案 
傳感器間標定中LiDAR2Camera,利用同步采集的點云與圖像數據,通過標定板特征匹配,計算外參矩陣(旋轉矩陣 R、平移向量 T),重投影誤差均值 0.0138m,支持點云投影到圖像像素坐標。
2626
康謀keymotek ??? 1年前
SimSolid技術原理解析 衡祖仿真 
SimSolid中的自由度(DOF),不是傳統有限元分析中固有的點自由度(DOF),而是以體積、面積、線云、點云的形式提供幾何支持的函數,使SimSolid具備處理幾何缺陷和裝配接觸缺陷的能力,如間隙、穿透和不規則接觸區域等。2、 傳統有限元建模誤差的來源在設計過程中實施仿真分析,意味著將以分析結果為依據進行設計決策。因此,采用可預測精度的分析工具就顯得非常重要。
2443 1
仿真驅動設計 ??? 2年前
誠智鵬3DCC V6.0震撼發布!10大創新引領行業變革 
3DCC V6.0版本的基于點云的表面特征分析及裝配功能,通過實現點云空間配準,能夠精準地將來自不同角度、不同設備的點云數據進行整合與對齊,解決了傳統點云配準中的精度問題。通過高效的配準算法,系統能夠在不依賴繁瑣手工操作的情況下,自動完成點云數據的精準對接。
3226
笑酒仙 ??? 1年前
UWB測距的遮蔽區界址點空地組網定位研究 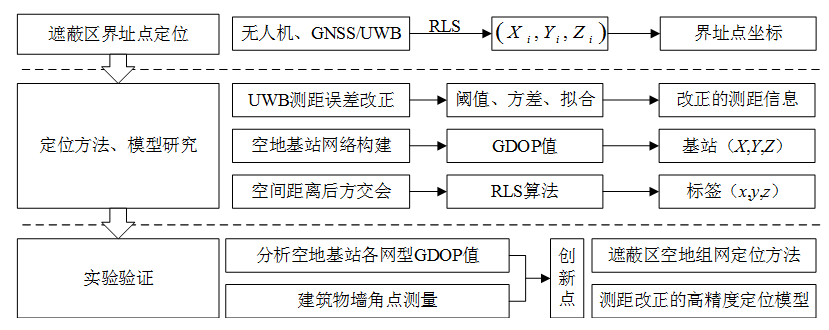
4個測試點在進行UWB測距誤差改正后,均方根誤差明顯減小。
3886
繪夢流光 ??? 3年前
?3650米!看千巡翼X4無人機如何破解高原公路勘測難題 
本次作業數據數據滿足項目要求,所獲得的點云高差中誤差、點云密度滿足1:500要求; 2. 設備在高海拔作業,動力冗余充足,抗風性能好,可進行高精度仿地飛行; 3.飛行高度120米,行間距90嗎,雙航帶作業,真彩色點云帶寬大于200米; 點云后處理軟件具有斷面提取、土方量計算等特色功能,導入道路中線即可進行斷面提取。
2245
千尋位置行業應用 ??? 3年前
20條/頁 
 88
88 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
