



209基于matlab的無(wú)人機(jī)路徑規(guī)劃
法(CPFIBA)。輸出距 
基于matlab的無(wú)人機(jī)路徑規(guī)劃,包括2D路徑和3D路徑,三種優(yōu)化算法,分別是蝙蝠算法(BA)、蝙蝠算法融合差分進(jìn)化算法(DEBA)、結(jié)合人工勢(shì)場(chǎng)方法的改進(jìn)混沌蝙蝠算法(CPFIBA)。輸出距離迭代曲線和規(guī)劃的路徑。程序已調(diào)通,可直接運(yùn)行。
2550
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
如何使用無(wú)人機(jī)進(jìn)行三維建模 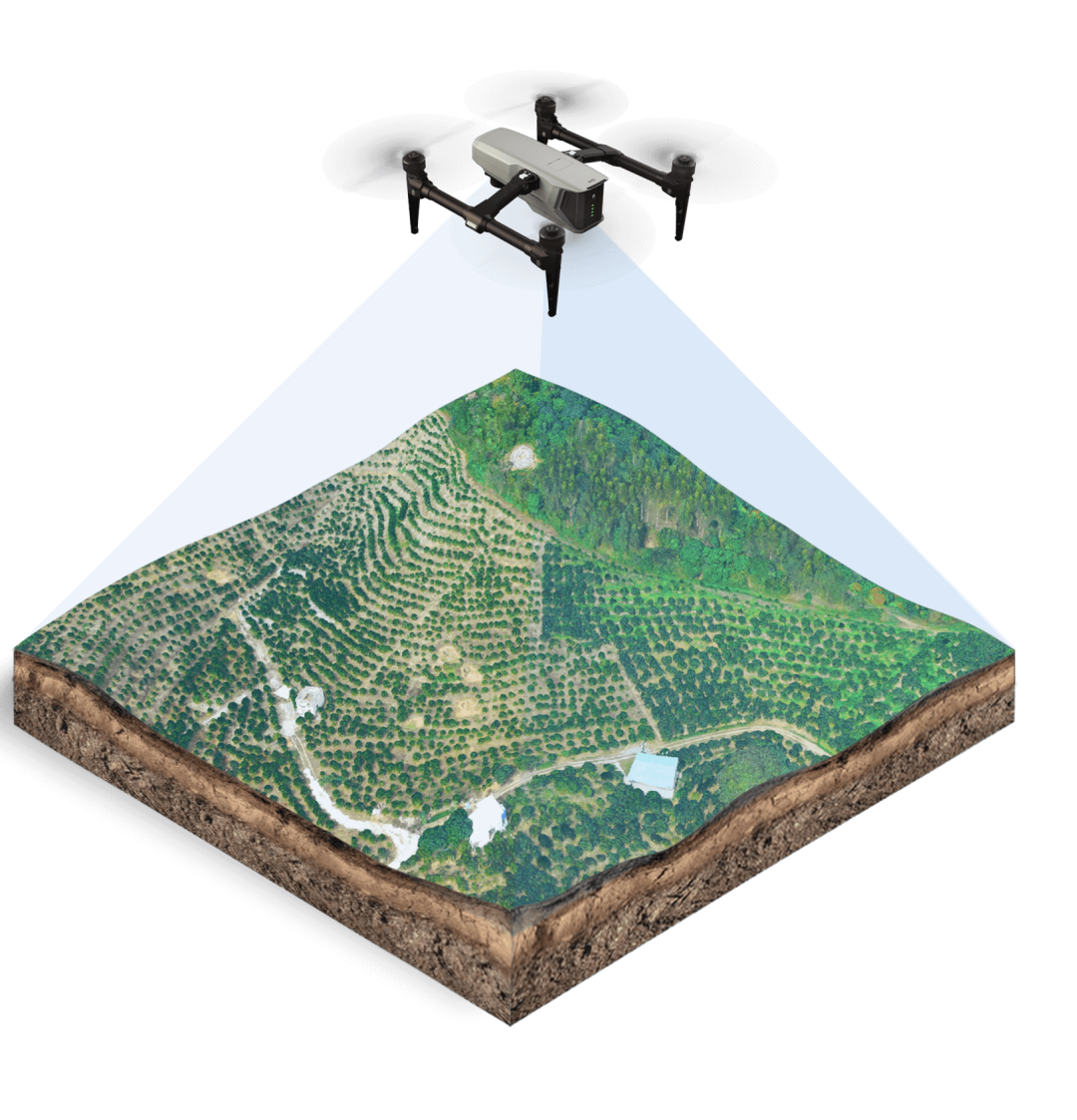
通過(guò)傾斜攝影數(shù)據(jù)建立的實(shí)景三維產(chǎn)品,可服務(wù)于規(guī)劃、國(guó)土資源管理、城市管理、招商引資等方面,提升城市的對(duì)外宣傳形象。
7343 2 1
無(wú)人機(jī)圈 ??? 2年前
208基于matlab的多目標(biāo)遺傳算法的無(wú)人機(jī)航路規(guī)劃 
基于matlab的多目標(biāo)遺傳算法的無(wú)人機(jī)航路規(guī)劃。在三維航路中進(jìn)行航路代價(jià)估計(jì),綜合考慮路徑長(zhǎng)度、隱蔽性、危險(xiǎn)度,規(guī)劃出最優(yōu)路徑。輸出3D規(guī)劃路徑。程序已調(diào)通,可直接運(yùn)行。
2301
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
無(wú)人機(jī)三維建模對(duì)光伏測(cè)繪的影響有多大? 
隨著科技的快速發(fā)展以及無(wú)人機(jī)技術(shù)的不斷提升,許多光伏企業(yè)選擇借助無(wú)人機(jī)進(jìn)行測(cè)繪工作,快速生成三維建模,提高測(cè)繪工作的質(zhì)量和效率。1.提高效率和精度無(wú)人機(jī)可以在光伏測(cè)繪項(xiàng)目中快速獲取高精度三維數(shù)據(jù),通過(guò)軟件處理,生成三維模型,有助于提高測(cè)繪設(shè)計(jì)的精度和效率。
2092
鷓鴣云光伏軟件 ??? 2年前
無(wú)人機(jī)+三維實(shí)景建模助力古建筑保護(hù),傳承歷史記憶 
本文將詳細(xì)介紹如何利用無(wú)人機(jī)進(jìn)行古建筑實(shí)景三維建模,以及這項(xiàng)技術(shù)對(duì)于旅游、文化保護(hù)和歷史研究的影響。無(wú)人機(jī)作為一種遠(yuǎn)程操控的飛行器,具備航拍和航測(cè)的功能,可通過(guò)高清攝像設(shè)備實(shí)時(shí)傳輸圖像和視頻。無(wú)人機(jī)可以在古建筑周?chē)杂娠w行,拍攝到各個(gè)角度的圖片和視頻,并通過(guò)三維建模軟件將這些圖像和視頻進(jìn)行處理,生成真實(shí)逼真的三維模型。
2531
千尋位置行業(yè)應(yīng)用 ??? 2年前
無(wú)人駕駛車(chē)輛MPC局部路徑規(guī)劃+軌跡跟蹤全集 

無(wú)人駕駛車(chē)輛局部路徑規(guī)劃+軌跡跟蹤C(jī)arsim配置流程+代碼講解。
1782
愛(ài)足球的技術(shù)宅 ??? 4年前
206基于matlab的無(wú)人機(jī)航跡規(guī)劃(UAV track plannin) 
基于matlab的無(wú)人機(jī)航跡規(guī)劃(UAV track plannin)。
2332
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
無(wú)人機(jī)礦山測(cè)繪可視化模型采集 
3.數(shù)據(jù)精準(zhǔn),無(wú)人機(jī)系統(tǒng)可以利用所獲得的信息生成DEM、三維正射影像圖、三維景觀模型、三維地表模型等二維、三維可視化數(shù)據(jù),模型分辨率可達(dá)1.5公分,數(shù)據(jù)精準(zhǔn)度高。礦業(yè)地形圖測(cè)量方案一、高效率低空攝影采集方案在APP上框選測(cè)區(qū)面積并設(shè)定飛行高度,無(wú)人機(jī)即可自動(dòng)生成飛行航線路徑。通過(guò)無(wú)人機(jī)自動(dòng)飛行,可按測(cè)繪要求標(biāo)準(zhǔn)拍攝照片。
2697
無(wú)人機(jī)圈 ??? 3年前
基于無(wú)人機(jī)和無(wú)人船的島礁地形測(cè)繪技術(shù) 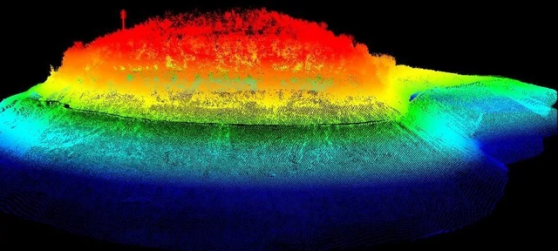
面向無(wú)人島礁等高危險(xiǎn)地區(qū),可以快速獲取高分辨率正射影像和激光點(diǎn)云等數(shù)據(jù)。本文利用大地測(cè)量提供的高精度控制點(diǎn)信息,提高無(wú)人機(jī)測(cè)量絕對(duì)精度,成果可用于島礁規(guī)劃與施工。機(jī)載分系統(tǒng)主要用于獲取島礁陸上部分成果。多拼相機(jī)用于獲取真三維模型及DOM數(shù)據(jù)。在低潮時(shí)間段,通過(guò)無(wú)人機(jī)進(jìn)行水陸交界處數(shù)據(jù)獲取,可以擴(kuò)大水上數(shù)據(jù)獲取范圍,提高與水下數(shù)據(jù)的重疊度,以提高數(shù)據(jù)拼接的精確度。
3527
無(wú)人機(jī)圈 ??? 3年前
光伏巡檢3.0時(shí)代,無(wú)人機(jī)還可以做什么? 
登錄界面 針對(duì)于光伏場(chǎng)站的特殊性,星邏馭光具有自動(dòng)建模的功能,支持光伏電站二維地圖和三維模型的構(gòu)建,用戶可基于場(chǎng)站的三維模型進(jìn)行任務(wù)規(guī)劃。
2339
無(wú)人機(jī)10086 ??? 4年前
基于matlab求解二維非穩(wěn)態(tài)對(duì)流擴(kuò)散反應(yīng)問(wèn)題 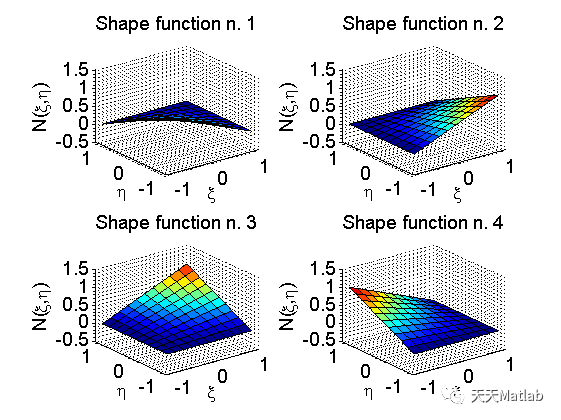
、水體光學(xué)參數(shù)反演、NLOS信號(hào)識(shí)別、地鐵停車(chē)精準(zhǔn)預(yù)測(cè)、變壓器故障診斷2.圖像處理方面圖像識(shí)別、圖像分割、圖像檢測(cè)、圖像隱藏、圖像配準(zhǔn)、圖像拼接、圖像融合、圖像增強(qiáng)、圖像壓縮感知3 路徑規(guī)劃方面旅行商問(wèn)題(TSP)、車(chē)輛路徑問(wèn)題(VRP、MVRP、CVRP、VRPTW等)、無(wú)人機(jī)三維路徑規(guī)劃、無(wú)人機(jī)協(xié)同、無(wú)人機(jī)編隊(duì)、機(jī)器人路徑規(guī)劃、柵格地圖路徑規(guī)劃、多式聯(lián)運(yùn)運(yùn)輸問(wèn)題、車(chē)輛協(xié)同無(wú)人機(jī)路徑規(guī)劃
2286 1 1
Matlab心得交流 ??? 2年前
多旋翼無(wú)人機(jī)的振動(dòng)實(shí)驗(yàn)和仿真分析 
關(guān)鍵詞:多旋翼無(wú)人機(jī);結(jié)構(gòu)振動(dòng);低頻;扭轉(zhuǎn)模態(tài);彎曲模態(tài);現(xiàn)在無(wú)人機(jī)系統(tǒng)正朝著提高無(wú)人機(jī)自主能力方向發(fā)展,主要集中在提高其智能化水平上,如環(huán)境感知[1]、規(guī)劃[2,3]和控制[4]等,但是對(duì)于無(wú)人機(jī)結(jié)構(gòu)本身關(guān)注的不太多。作為下一代新型交通工具的候選者,多旋翼無(wú)人機(jī)的安全性和乘坐舒適性無(wú)疑是至關(guān)重要的,因此,對(duì)無(wú)人機(jī)振動(dòng)帶來(lái)結(jié)構(gòu)性損壞以及噪聲影響也應(yīng)該得到更加廣泛關(guān)注。
5846 7 2
無(wú)人機(jī)圈 ??? 2年前
從人工測(cè)繪到無(wú)人機(jī)航測(cè):探索測(cè)繪技術(shù)的巨大變革 
這種技術(shù)的應(yīng)用非常廣泛,包括國(guó)土調(diào)查、城市規(guī)劃、自然資源管理等領(lǐng)域。 三、無(wú)人機(jī)航測(cè)的興起隨著無(wú)人機(jī)技術(shù)的興起,無(wú)人機(jī)航測(cè)成為當(dāng)前測(cè)繪領(lǐng)域的熱點(diǎn)話題。無(wú)人機(jī)航測(cè)借助于高分辨率的遙感傳感器,能夠更加準(zhǔn)確地獲取地面數(shù)據(jù)。
2173
千尋位置行業(yè)應(yīng)用 ??? 2年前
基于粒子群優(yōu)化算法的六自由度機(jī)械臂三維空間避障規(guī)劃 
[2]馬宇豪.六自由度機(jī)械臂避障軌跡規(guī)劃及控制算法研究[D].中國(guó)科學(xué)院大學(xué)[2024-06-08]. 圖1 六自由度機(jī)械臂三維空間避障規(guī)劃示意圖 基于粒子群優(yōu)化算法的三維避障路徑規(guī)劃1.1 路徑規(guī)劃問(wèn)題描述路徑規(guī)劃是指在已知環(huán)境信息的情況下,確定從起始點(diǎn)到目標(biāo)點(diǎn)的最優(yōu)路徑,并且該路徑不能與環(huán)境中的障礙物相交。
2409
320科技工作室 ??? 1年前
海戰(zhàn)場(chǎng)無(wú)人作戰(zhàn)體系協(xié)同運(yùn)用與指揮控制設(shè)想 
3)無(wú)人集群任務(wù)規(guī)劃與智能化決策控制技術(shù)無(wú)人集群的任務(wù)規(guī)劃主要包括路徑、時(shí)序、策略、載荷規(guī)劃,在海上作戰(zhàn)中,作戰(zhàn)指揮系統(tǒng)及無(wú)人平臺(tái)戰(zhàn)術(shù)指控系統(tǒng)主要關(guān)注無(wú)人集群的協(xié)同情報(bào)偵察、分布火力打擊、協(xié)同突防等任務(wù)的行動(dòng)路徑及協(xié)同策略規(guī)劃。
4722 1 1
無(wú)人機(jī)圈 ??? 3年前
數(shù)字兩機(jī)丨中國(guó)航發(fā)長(zhǎng)春控制:淺談航空發(fā)動(dòng)機(jī)零部件數(shù)字化檢測(cè)技術(shù) 
在檢測(cè)路徑符合相關(guān)標(biāo)準(zhǔn)后,就可以發(fā)布檢測(cè)路徑。 2.2 代碼編譯和后處理 在創(chuàng)建完檢測(cè)路徑后,需要把路徑代碼編譯成通用的測(cè)量機(jī)編程語(yǔ)言,以增強(qiáng)測(cè)量的適用性,以防測(cè)量機(jī)編程語(yǔ)言與測(cè)量機(jī)出現(xiàn)不匹配的問(wèn)題。 2.3 三維檢測(cè)報(bào)告發(fā)布 為增強(qiáng)檢測(cè)結(jié)果的可讀性,需要發(fā)布檢測(cè)三維報(bào)告。
4181 4 1
Space ONE ??? 2年前
淺析無(wú)人機(jī)的自主與智能控制 
第二等級(jí)是完成小組特定的工作,定義為“高品質(zhì)的工作”:能夠?qū)崿F(xiàn)四維導(dǎo)航,實(shí)現(xiàn)態(tài)勢(shì)感知與認(rèn)知;能夠?qū)崿F(xiàn)路徑規(guī)劃與重規(guī)劃;任務(wù)規(guī)劃與重規(guī)劃;無(wú)意識(shí)信息的認(rèn)知。 第三等級(jí)是實(shí)現(xiàn)機(jī)群協(xié)同任務(wù),定義為“為集體使命高效工作”:編隊(duì)飛行;有人/無(wú)人協(xié)同作戰(zhàn);群體感知與態(tài)勢(shì)共享;集群聯(lián)合作戰(zhàn)。
2627
無(wú)人機(jī)10086 ??? 3年前
星邏馭光 | 無(wú)人機(jī)賦能西氣東輸管線巡檢 
同時(shí),星邏智能利用“祺云”無(wú)人機(jī)綜合操作系統(tǒng),實(shí)現(xiàn)了對(duì)無(wú)人機(jī)和機(jī)庫(kù)的集群調(diào)度,通過(guò)在線規(guī)劃任務(wù)路徑,讓無(wú)人機(jī)從機(jī)庫(kù)一鍵起飛,自動(dòng)巡檢目標(biāo)區(qū)域并進(jìn)行信息采集,通過(guò)搭載雙光相機(jī),實(shí)時(shí)推送視頻流至后臺(tái)指揮中心,不論白天黑夜皆能洞察每一次變化。
2168
無(wú)人機(jī)10086 ??? 4年前
如何利用無(wú)人機(jī)開(kāi)展林地測(cè)繪工作?
無(wú)人機(jī)利用超廣角可進(jìn)行大范圍測(cè)繪,總覽全局信息;利用變焦相機(jī)進(jìn)行快速目標(biāo)切換,確保測(cè)繪目標(biāo)準(zhǔn)確;實(shí)現(xiàn)高清細(xì)節(jié)捕捉,測(cè)繪精確;零接觸任務(wù)對(duì)象,降低林區(qū)復(fù)雜地形環(huán)境對(duì)工作人員的安全威脅。 無(wú)人機(jī)林地測(cè)繪的工作流程1、飛行航線規(guī)劃 根據(jù)任務(wù)環(huán)境情況選擇合適的二維、三維、帶狀等航線方式。
1913
無(wú)人機(jī)10086 ??? 3年前
“小身材高精度”千巡翼X1多場(chǎng)景應(yīng)用案例 
受相關(guān)單位委托,我司承接該建筑數(shù)字化存檔任務(wù),通過(guò)無(wú)人機(jī)傾斜攝影和貼近攝影測(cè)量等技術(shù)手段采集并制作該建筑高精度三維模型。由于該地區(qū)運(yùn)營(yíng)商網(wǎng)絡(luò)信號(hào)時(shí)有中斷,機(jī)載RTK無(wú)法獲取固定解,作業(yè)無(wú)法開(kāi)展。同時(shí),傳統(tǒng)手段操作繁瑣,經(jīng)過(guò)綜合對(duì)比,團(tuán)隊(duì)決定采用千尋位置北斗星地一體航測(cè)解決方案。
2211
千尋位置行業(yè)應(yīng)用 ??? 3年前
20條/頁(yè) 
 31
31 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
