
本文發表于《指揮控制與仿真》
2022年第四期
摘要:分析了無人作戰平臺的能力特點,設想了無人作戰體系在海戰場中的協同應用場景,設計了無人作戰體系的指揮控制系統組成與指揮控制結構,對無人作戰體系指揮控制中的主要關鍵技術進行了分析,促進無人作戰平臺在海戰場中的協同作戰應用。
未來海上作戰是一種聯合、立體、分布、全方位機動的軍事行動,是以海洋為機動空間,由海上發起,向海上、岸島實施兵力、火力投送的作戰樣式,是一種高風險、巨復雜的戰役、戰術行動。為了確保作戰成功,必須在作戰區域內,擁有對敵空、海和岸灘作戰力量的決定性優勢。近年來,無人機(UAV)、無人艇(USV)、無人潛航器(UUV)、無人戰車(UCV)等無人作戰平臺(UCP)作為一種顛覆性的新型作戰力量,引發了戰爭形態與作戰方式的變革,也為海戰場作戰過程中的偵察、監視、打擊、破障、通信等提供了新質作戰能力,無人作戰平臺已逐步成為海戰場作戰體系中的重要環節。未來海戰場無人作戰體系是綜合利用各型同構、異構無人作戰平臺,形成“互聯共享、分布自主、智能協同”的海上作戰體系,從而提升海戰場整體作戰效能。為了發揮無人作戰體系的協同作戰能力,有必要研究無人作戰體系在海戰場中的協同應用及其指揮控制問題,落實無人作戰體系在海戰場中的協同應用實施,促進海上作戰形態逐漸由“有人化、信息化”向“信息化、無人化、智能化”過渡,綜合發揮無人作戰平臺使用靈活,綜合作戰效益高,適用于危險環境,人員傷亡率低,全壽命費用低等顯著優勢,提升海戰場作戰體系的整體作戰效能。
近年來,無人作戰平臺的作戰性能和殺傷力越來越大,可以用無人作戰平臺替代人來完成多種作戰任務,無人作戰平臺在現代戰爭中的應用優勢明顯,具有反偵察能力強,工作持續時間長,不擔心人員傷亡,可操作性強,偵察能力強等特點,已經被越來越多地應用于執行多種危險和復雜的任務,也為海上作戰過程的情報、偵察、監視、打擊、通信等方面提供了新質作戰力量
UAV可以根據不同載荷,具有偵、擾、導、攻、通的能力,其能夠前出,對關鍵海域及航線進行長時間偵察與監控;能對敵岸灘島嶼區域進行抵近偵察,先敵發現目標;能夠進行電子干擾與戰術誘騙;能夠對遠程火力引導攻擊,當對海域或島嶼抵近偵察發現目標后,為艦艇火炮或導彈選定攻擊目標,測定目標參數,引導遠程火力進行超視距打擊引導,提升火力遠程打擊范圍和效果;能夠攜帶不同類型彈藥對敵方陸、海、空作戰域實施全方位多域攻擊;能夠作為通信中繼,補盲和延長通信距離,擴大作戰半徑;能夠開展協同作戰,與有人機進行戰術協同。
USV依靠遙控或自主方式在水面航行,主要用于執行危險或者不適用于有人船只執行的任務。USV利用其自主性強,隱蔽性高,載荷大,續航長,避免人員傷亡等優勢,可顯著提升海上作戰能力。根據載荷不同,USV可遂行偵察探測、警戒巡邏、反水雷、反潛、火力打擊、目標指示、通信中繼等任務;能夠抵近重要海域與航線進行目標搜索,對特定海域進行巡邏,對可疑目標進行跟蹤;能夠在重點海區遂行探雷、掃雷、破障行動,也能在指定海區進行搜潛、攻潛;能夠對目標進行火力打擊或指示其他火力進行打擊;可作為通信的橋接,擴展通信范圍,也可以作為海上無人集群的中心控制節點,對集群進行任務控制。
UUV可以單機獨立或集群組網方式進行協同作戰,根據任務分工及裝備載荷不同,UUV能夠在小范圍海域執行情報偵察任務,獲取作戰區域水下環境信息,可以集群方式進行協同感知,完成對水下目標的檢測、定位和水文、地理信息的感知;能夠以集群的方式,在一定深度的作戰海域進行探雷、識雷、滅雷;能夠長時間、大范圍地警戒巡航,發現可疑目標進行預警;能夠探測、跟蹤敵艦艇、潛艇,并進行火力打擊,也可以配合水面艦艇或潛艇,對敵水面艦艇、潛艇實施伏擊,或直接引導艦艇攻擊目標。
UCV可用于海戰場兩棲作戰的突擊上陸及陸上行動階段,遂行偵察監視、警戒巡邏、電磁對抗、地面通信中繼、定位引導、高危作業、陣地沖鋒、物資運輸等任務。偵察巡邏型UCV對戰術目標和周圍危險環境進行觀測,武裝型UCV可在灘涂等環境突破敵方火力封鎖區,運輸型UCV可后勤補給運送傷員,中繼型UCV支撐復雜環境通信,破障型UCV配置不同載荷,可以對水際灘頭的阻絕墻、混合雷場進行掃雷破障。
本文以海戰場兩棲作戰為背景,研究無人作戰體系協同運用問題。兩棲作戰面臨水文不明、氣象多變、礁多流急、海道狹窄等不利因素;登陸兵力展開受限,上陸過程中面臨守方嚴密的水雷及火力防御體系,傷亡和戰損較大;情報保障要求高,守方嚴密的防御體系使得攻方偵察兵力抵近偵察十分困難;掃雷破障難度大,守方在水際灘頭構筑了雷場、火力、阻物相結合的障礙配系,遲滯了登陸通道的開辟速度];需要持續火力支援,保障突擊上陸兵力安全。本文重點研究海戰場兩棲作戰的情報偵察、掃雷保障、火力打擊等典型任務的無人平臺運用。這些無人平臺主要有偵察型、打擊型、偵打型UAV,警戒型、反水雷型、反潛型、打擊型和偵打型USV,偵察型、反水雷型、攻擊型和偵打型UUV,偵察型、打擊型、破障型兩棲UCV等。各無人平臺既可以單獨遂行任務,也可組網形成集群,為作戰提供“分布、智能、安全”的情報偵察、掃雷破障、火力支援能力。
海戰場兩棲作戰態勢瞬息萬變,須及時發現敵作戰兵力兵器,從而減少傷亡。當抵近敵方防御體系進行戰場偵察與作戰,必然遭遇敵防御火力強勁攻擊,安全受到威脅。可利用UAV、USV、UUV成本較低、損耗代價小、部署靈活等特點,在加強續航與載荷的情況下,抵近敵高風險區域,在空中、水面、水下、水際灘頭相互配合,進行有人、無人相互協同探測,構建海戰場多維立體預警偵察體系,利用無人作戰平臺集群之間的自主協同能力,開展抵近偵察,擴大探測范圍,增加傳感器數量,提升偵察體系的可靠性與容災能力,獲取大縱深、全方位、全時段的海戰場態勢信息
。無人作戰體系在海戰場作戰中的情報偵察作戰概念如
圖1
所示。
圖1 無人作戰體系協同情報偵察作戰概念圖
在海上,指揮艦指揮艦載直升機、水面艦艇、UAV、USV、UUV前出進行協同探測,獲取空中、海上、水下情報的圖像、數據、電磁等信息,回傳給指揮艦統一態勢處理;有人直升機指揮或配合UAV及其集群,開展有人、無人協同方式的信息探測,直升機負責指令下達,UAV集群根據任務分配,對海戰場的空、海、水際灘頭的敵方目標、兵力部署、行動意圖進行偵察,并將獲取的信息回傳給有人直升機進行初步處理后,回饋給指揮艦進行綜合處理與分發共享;水面艦艇可以指揮或配合USV、UUV及其集群,協同探測水面、水下情報,將偵察獲取的敵方動目標信息經過水面艦艇初步處理后,送指揮艦統一融合。在岸灘上,登陸部隊可利用陸上UAV、偵察UCV及其集群在敵方火力威脅較大的區域,以自主方式協同有人兩棲偵察車遂行陸上目標偵察任務,獲取敵方火力部署、時敏重要目標等信息,并將獲得的圖像、數據發送給指揮車,由指揮車統一處理,兩棲偵察車也可直接指揮控制無人偵察車及其集群,規劃其偵察任務,將獲取的無人偵察車探測信息進行預處理。各USV、UAV、UUV集群內部可以有中心或無中心的方式進行分工協作、信息處理與共享。
在由海到岸機動作戰時,可利用掃雷艦艇、掃雷型USV、UUV進行掃雷,對水際、灘頭進行水雷及障礙排除,一般由海上負責掃雷的指揮艦控制掃雷USV、UUV進行掃雷行動,指揮艦艇收集無人系統上報的探測信息,進行綜合識別與綜合決策,向無人作戰平臺下達具體的掃雷指令,也可由USV群、UUV群進行集群智能化自主掃雷活動。由于USV具備較大載荷及完備的信息處理設備,以及較長的續航能力,可以USV為中心自主組織USV群及UUV群進行水雷的探測、識別、滅雷。當無人集群之間協同反水雷時,水雷的探測、分類、識別、滅雷可以根據無人作戰平臺功能區別,既可以由各USV、UUV單獨完成,也可以由有人掃雷艦艇、USV群、UUV群進行任務區分,指定有中心或無中心的協同模式完成。此外,根據需要,UUV可以與掃雷艦艇進行配合,引導掃雷艦艇進行排雷
。瀕海水際灘頭破障主要指揮無人破障車及其集群,對灘頭阻絕墻、雷場進行掃殘破障。無人破障車之間組成集群協同模式,進行任務分配,按照自主方式進行作業
,作戰概念如
圖2
所示。
圖2 無人作戰體系協同掃雷作戰概念圖
火力支援作戰活動貫穿兩棲作戰的全過程,分布部署的多平臺火力單元形成彈性可變的火力打擊網,相互協同形成高、中、低,遠、中、近的火力配系,按照火力的時空計劃,利用艦炮火力、艦載直升機火力、艦載UAV、USV火力相互協同對敵方海上、岸上目標進行打擊壓制,掩護海上艦艇或對陸攻擊兵力進行作戰,同時接收火力召喚與陸上目標指示,組織待機火力進行火力投送;在陸上作戰過程中,海上接收陸上的火力召喚及目標指示,協助陸上火力進行目標摧毀,作戰概念如
圖3
所示。
圖3 無人作戰體系協同火力打擊作戰概念圖
在海上由指揮艦艇指揮艦載直升機、打擊型UAV,組織有人、無人協同的空中打擊群或UAV無人打擊群,也可組織由火力支援艦艇與打擊型USV構建的有人、無人協同的水面打擊群或USV無人打擊群。利用無人機抵近目標附近區域進行探測、打擊,引導有人機在遠距離安全區域發射火力,進行遠程滲透打擊。無人機集群前出目標偵察,誘使敵方暴露其防御火力,有人機利用導彈及反輻射導彈對目標進行空中火力壓制。充分利用USV平臺前出距離遠,不易被發現等特點,結合有人平臺從不同方位進行分布式打擊,USV也可向火力支援艦艇提供目標指示信息,引導艦艇火力進行射擊。登陸兵力上岸后,可利用配置的UAV和UCV,協助兩棲突擊車采用有人無人協同方式、無人車/無人機集群自主協同方式對敵火力攻擊,UCV和UAV可為兩棲突擊車提供目標信息,引導兩棲突擊車火力打擊。陸上指揮車可以根據UCV、UAV上報的目標信息向海上艦艇或飛機進行火力召喚,請求火力支援
。
無人作戰體系指揮控制系統,主要輔助各層級指揮人員對同構、異構無人作戰平臺進行集成、協調與控制,以完成偵察、監視、打擊等戰術任務。設想的指控系統組成主要包括無人平臺戰術指控系統以及無人平臺的任務載荷控制系統,如
圖4
所示。
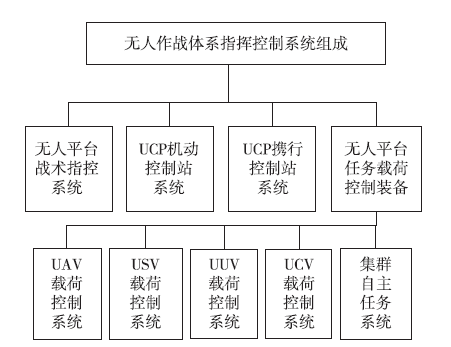
圖4 海戰場作戰中的無人體系指揮控制裝備組成設想
無人平臺戰術指控系統,主要負責對海上、岸灘同構、異構UCP無人集群的綜合指揮控制。UCP控制站系統,主要負責對單個或多個UCP的運動軌跡規劃及任務載荷執行控制,并接收UCP下傳的各類信息。集群自主任務系統,主要負責UCP實現自主決策、集群協同控制,含自主任務規劃、態勢處理、智能協同決策等功能。UCP載荷控制系統,主要負責無人平臺的任務載荷的工作控制及運動姿態狀態控制。
海戰場無人作戰平臺的作戰樣式主要有單平臺作戰、集群作戰、有人/無人協同作戰三種樣式,其指揮控制模式主要包括人在環內、自主作戰、混合控制三種模式,如
圖5
、
圖6
、
圖7
所示。
圖5 無人作戰體系人在環內的指控模式
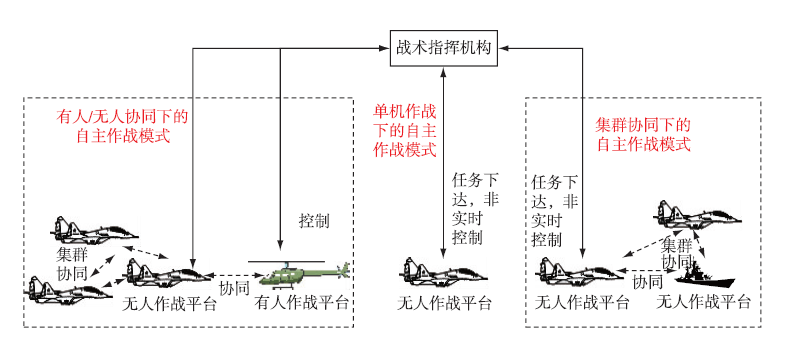
圖6 無人作戰體系自主作戰指控模式
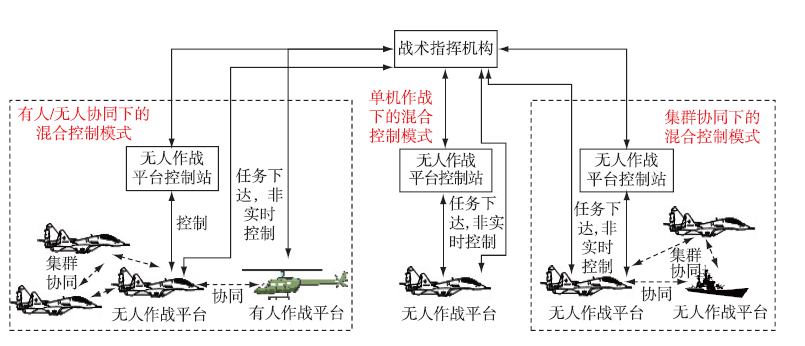
圖7 無人作戰體系混合控制模式
人在環內模式下,無人作戰平臺全時接收控制站的指令,按照指令進行單機作戰、與其他無人平臺形成集群作戰、和有人作戰平臺可進行協同作戰,這種指控模式相對簡單
。
自主作戰模式下,戰術指揮機構可直接對無人平臺下達任務指令,無人作戰平臺接收任務后,控制其載荷進行戰場感知、軌跡規劃、障礙避碰,完成各項任務。當集群作戰時,無人作戰平臺自主任務分配,協同組網分工完成探測、識別與打擊等行動
。
在混合控制模式下,戰術指揮機構根據任務復雜情況,可向無人作戰平臺控制站或無人作戰平臺下達任務。既可由無人平臺控制站實時控制無人平臺及集群進行任務行動,也可以由無人作戰平臺及集群自主規劃并完成任務
。
綜上所述,海戰場無人作戰體系指揮控制各級指揮系統之間的指揮控制結構
如
圖8
所示。
圖8 無人作戰體系指揮控制結構設想
作戰指揮系統進行方案決策、制定有人/無人平臺的任務計劃,向無人平臺戰術指控系統及有人平臺戰術指控系統下達計劃、命令,指揮有人、無人兩類裝備的協同作戰。
無人平臺戰術指控系統進行同類、異構等無人平臺的綜合作戰指揮,各類無人平臺由控制站完全控制其執行運動軌跡與相關任務,無人平臺戰術指控系統指揮多個同類、異構UCP控制站系統,UCP控制站系統同時控制多個同類UCP作戰,該指揮結構下,UCP既可以單獨作戰,也可以在無人平臺戰術指控系統及UCP控制站系統協同指揮下,與其他UCP相互協同,完成有人控制的無人集群作戰。
無人平臺戰術指控系統可向UCP下達任務,直接指揮單UCP及多UCP集群進行自主作戰。單UCP自主作戰時,接收任務分配,自主感知戰場態勢,根據分配的探測或打擊任務實時規劃運動軌跡,自主執行任務。多UCP集群自主作戰時,無人平臺戰術指控系統規劃同類、異構UCP集群的作戰任務,進行任務分配,無人UCP集群接收任務,進行任務分解,完成任務,無人平臺戰術指控系統接收UCP集群通報的探測信息或打擊情況信息,重要情況下可以適時干預行動。
在作戰指揮系統的統一指揮下,無人平臺戰術指控系統與有人平臺戰術指控系統之間進行協同互操作,實現有人/無人作戰平臺的協同作戰指揮,將有人作戰平臺的指揮與戰術決策優勢,與UCP無人平臺的自主決策、靈活部署、成本較低、環境適應性強、極大保護人員安全等優勢相結合,提高整體作戰能力。有人/無人作戰平臺的協同作戰指揮采用集散式的指揮控制結構,主要有兩種形式:一種是無人平臺戰術指控系統與有人平臺戰術指控系統進行協同,后者請求前者進行任務協同,無人平臺戰術指控系統將任務分解下發到各UCP,集中指揮各UCP配合有人作戰平臺完成作戰;另一種就是有人作戰平臺戰術指控系統直接進行UCP的指揮權交接,直接指揮UCP及其集群進行協同作戰,既可采用集中指揮方式,也可用分布式協同方式進行無人集群的指揮,完成有人、無人協同作戰。
無人作戰體系應用于海上作戰中,既要發揮無人作戰平臺的性能及效費比優勢,又要發揮有人作戰平臺人員的情報判斷、決策規劃、綜合控制能力,其指揮控制所涉及的重要關鍵技術如下。
無人作戰體系中同類、異構UCP,具有人在環內、自主作戰、有人無人協同的多種作戰模式,需要建立適合海戰場作戰過程中,不同階段下的UCP開放式指揮控制結構,能夠支撐有人平臺為主、UCP為輔以及有人/無人平臺對等協同的多種使用模式,確定其指揮關系、控制流程、人機協作交互等級、UCP自主協同等級、UCP間互操作標準、有人/無人協同層次與模式,確保指揮控制體系結構的魯棒性、敏捷性、開放性[
15
]。
確定海上作戰協同探測、協同打擊的同類、異構作戰平臺之間互操作等級與協同模式,參考美軍《無人系統綜合路線
圖 2017
—2042》,規定若干等級的UCP互聯互通標準,利用通用化協議,采用開放式、通用化、彈性化的任務架構,為無人平臺提供按需、動態、靈活的集群集成能力,實現有人、無人平臺之間的指令聯通及信息共享,確定主從式、協作式、混合式協同模式。主從模式下,有人平臺直接管控無人平臺執行抵近偵察、誘騙敵方防御火力、火力打擊與評估任務;協作模式下,有人、無人集群自主決策、協同偵察和打擊,按照同步協同控制算法,分布式協同完成作戰任務;混合式協同同時具備主從式與協作式的特點,例如有人平臺對無人平臺集群是主從式協同,而無人平臺集群內部則是協作式協同,確保人在環內中的主導權
。
無人集群的任務規劃主要包括路徑、時序、策略、載荷規劃,在海上作戰中,作戰指揮系統及無人平臺戰術指控系統主要關注無人集群的協同情報偵察、分布火力打擊、協同突防等任務的行動路徑及協同策略規劃。協同情報偵察的規劃,綜合利用UCP的探測資源,計算在有限時間、有限航程內實現對作戰海域區域目標的最優探測,優化探測隊形和方位, 實現無人系統探測行為的同步化、多維化;協同火力打擊規劃,綜合利用UCP的火力載荷、攻擊位置和待攻擊目標特性等, 實現在最短時間內完成對目標的最佳攻擊
。
兩棲作戰中的USV、UUV、UAV與地面UCV等無人作戰平臺,雖具備一定的自主作戰能力,能夠自行規劃運動軌跡及任務策略,但當無人作戰體系融入兩棲作戰過程時,必須接受戰術指控系統的指揮控制,戰術指控系統根據戰場態勢進行無人作戰任務規劃,無論是人在環內的作戰模式還是集群自主作戰模式,戰術指控系統都須制定指揮引導預案,引導和控制無人平臺進入任務執行區域,既要確保行動路徑的安全性,又要保證無人平臺之間任務協同的戰術、戰法的效率最大化。對于自主作戰模式,無人作戰平臺被引導進入作戰區域后,才開始按照預案及實時態勢,進行自主路徑規劃,執行任務,同時與同類或異構的集群內部無人平臺保持一定等級的互操作能力。可利用強化學習智能決策算法以及群體智能深度學習算法,結合戰術戰法知識庫,建立動態自適應的指揮引導模型,進行多無人平臺指揮引導計算及沖突檢測和避碰控制,提高指揮引導容量與準確度
。
本文設想將無人作戰體系的能力優勢應用到海戰場作戰中,在減少人員傷亡的同時,提升海戰場作戰整體作戰能力。同時,探究了無人作戰體系指揮控制結構,希望為海戰場作戰無人化技術發展作出貢獻。從公開的文獻看來,國際上對于無人作戰體系的技術及項目驗證的研究不多,海戰場作戰中的無人作戰體系應用與指揮控制技術還需要進一步研究。


























