



【JY】基于Matlab的(單)多自由度動力學代碼分享 
該程序適用于單自由度或多自由度計算分析~相關閱讀:【JY】代碼|極簡反應譜分析【JY】基于Matlab的雙線性滯回代碼編寫教程【JY】動力學利器 —— JYdyn函數包分享與體驗代碼詳解步驟一:構建質量矩陣以及剛度矩陣步驟二:構建 阻尼矩陣如果為單自由度計算,則采用常規計算得到阻尼,若為多自由度計算則采用瑞利阻尼進行計算。
4296 12 2
建源之光 - 減隔震 ??? 2年前
(交流貼)齒輪動力學、機械動力學、行星齒輪動力學、人字齒行星齒輪動力學、MATLAB建模、Workbench強度仿真等
本人專攻齒輪動力學、機械動力學、行星齒輪動力學、人字齒行星齒輪動力學、MATLAB建模、Workbench強度仿真等,歡迎相關研究方向的人員來交流。
2198
機械動力學仿真工程師 ??? 1年前
對偶域近場動力學(Dual-PD)的matlab、Fortran實現 
程序包括Fortran、matlab的形式可供大家學習,以及如何進行后處理。
2321 1
調和的大空 ??? 6月前
Matlab近場動力學(PD)原代碼:涵蓋BB/OSB、熱力耦合、復合材料及PD-FEM耦合 
一套深度集成、功能豐富的 Matlab 近場動力學(Peridynamics)原代碼合集。代碼不僅復現了PD領域的經典文獻算例(彈性問題驗證),更進一步拓展到了熱力學、復合材料及跨尺度耦合算法。適合作為研究生的科研底座、畢業設計參考或PD算法的深度進階學習資料。 基礎理論實現: 鍵基 PD (BBPD):最經典的鍵基模型,適用于脆性材料破壞分析。
1422
Zyax ??? 1月前
MATLAB/ADAMS求解動力學 

CASE1采用ode45求解動力學方程adams后處理及數據導出MATLAB數據導入提供matlab文獻繪圖模板CASE2四桿機構運動學基礎采用simulink求解運動學方程、求解機構鉸鏈約束內力SIMULINK——ADAMS聯合仿真過程及注意事項 CASE3(曲柄滑塊)拉格朗日動力學構建方法采用simulink
1029 3
偉_sss ??? 5年前
MATLAB/FORTRAN | 鍵基近場動力學(BBPD)動態松弛法實現準靜態單軸壓縮模擬(含預制裂隙),反力計算應力應變曲線 
一套基于 MATLAB/Fortran 編寫的二維鍵基近場動力學(Bond-based Peridynamics)數值仿真代碼。程序采用經典的動態松弛算法(Dynamic Relaxation),將動力學方程轉化為解決準靜態問題的工具,模擬二維材料在單軸壓縮載荷下的響應及裂紋擴展過程。
2298
Zyax ??? 1月前
基于matlab求解二維非穩態對流擴散反應問題 
我們需要求解該問題的數值解,以獲得對流擴散反應過程的詳細理解。數學模型: 為了數值求解該問題,我們需要建立數學模型。在二維非穩態對流擴散反應問題中,我們可以使用質量守恒方程和動量守恒方程來描述流體運動,使用物質守恒方程來描述物質傳輸,使用化學反應動力學方程來描述化學反應。通過將這些方程進行適當的離散化和近似,我們可以得到一個離散的數學模型。
2286 1 1
Matlab心得交流 ??? 2年前
Matlab做有限元分析并與ANSYS對比 附Matlab有限元結構動力學分析與工程應用徐斌下載 
下載地址:Matlab有限元結構動力學分析與工程應用徐斌
3124 2 1
筆筆 ??? 4年前
151基于matlab的齒輪-軸-軸承系統的含間隙非線性動力學模型 
基于matlab的齒輪-軸-軸承系統的含間隙非線性動力學模型,根據牛頓第二定律,建立齒輪系統嚙合的非線性動力學方程,同時也主要應用修正Capone模型的滑動軸承無量綱化雷諾方程,利用這些方程推到公式建模;用MATLAB求解畫出位移-速度圖像,從而得到系統在不同轉速下的混沌特性,分析齒輪-滑動軸承系統的動態特性。程序已調通,可直接運行。
2399
matlab應用與學習 ??? 2年前
141基于matlab的齒輪系統非線性動力學特性分析 
基于matlab的齒輪系統非線性動力學特性分析,綜合考慮齒側間隙、時變嚙合剛度、綜合嚙合誤差等因素下,參數阻尼比變化調節下,輸出位移、相圖、載荷、頻率幅值結果。程序已調通,可直接運行。
2243
matlab應用與學習 ??? 2年前
146基于matlab的齒輪非線性動力學 
基于matlab的齒輪非線性動力學,繪出系統狀態變量隨參數變化分岔圖,繪圖參數對應的系統各周期及混沌狀態的時間歷程圖、相軌跡圖、Poincare映射圖,程序已調通,可直接運行。
2195
matlab應用與學習 ??? 2年前
269 基于matlab的四連桿機構動力學參數計算 
基于matlab的四連桿機構動力學參數計算。將抽油機簡化為4連桿機構,仿真出懸點的位移、速度、加速度、扭矩因數、游梁轉角等參數,并繪出圖形。程序已調通,可直接運行。
2210 1
matlab應用與學習 ??? 1年前
matlab調姿機構動力學?
具體要求 調姿機構如圖 1所示,已根據結構進行簡化,推導出基于拉格朗日方程的動力學工程,麻煩檢查一下結構簡化是否合理,動力學方程推導是否正確,然后將機器人關節誤差(摩擦力、外部擾動、關節間隙、關節減速器誤差)融入動力學模型形成新的動力學方程,編寫相關程序,務必進行校核。
2436 5
用戶_50729 ??? 1年前
基于Matlab的飛機操穩分析/飛行動力學建模程序 
根據《航空飛行器飛行動力學》上的案例,進行固定翼飛機動穩定性和動操縱性的分析和程序化實現(縱向和橫向均包括);(飛機操縱性穩定性程序)視頻包括操穩分析的過程和思路介紹,參數的解讀,Matlab的程序化實現等。通過本視頻可以得到指定高度速度配平下,飛機的動穩定性結果,即模態特征,包含周期、阻尼比、半衰期等;以及動操縱性的結果,即對于升降舵、副翼、方向舵的階躍響應的時域和頻域結果。
1706 1
湍流實驗室 ??? 7年前
1-115基于matlab的用于銑削動力學建模的穩定性葉瓣圖分析(stablity lobe) 
基于matlab的用于銑削動力學建模的穩定性葉瓣圖分析(stablity lobe),程序已調通,可直接運行。購買后可下載視頻中的源程序文件。
301
matlab應用與學習 ??? 1年前
CFD(計算流體力學)在各行業中的應用 附王福軍計算流體動力學分析-CFD軟件原理與應用下載 
化工 化工工程是CFD重要的應用與發展領域,著名的CFD商業軟件Fluent就誕生于化工領域,CFD能夠準確地描述化工過程中的流體流動、混合、傳熱規律,近年來逐漸開始耦合到化學反應中應用于化學工程領域,并表現出巨大潛力。采用CFD與化學反應動力學相結合的方法可以將反應器內流動、混合、傳熱、反應等過程同時考慮,從而實現對非理想反應器的準確數值模擬。 3.
3541 2
學無止境. ??? 3年前
樊栓獅等:動力學強化水合儲氫技術研究進展 
常用的增大氣液接觸面積的方法可分為化學方法與物理方法:化學方法主要為添加動力學促進劑,例如添加表面活性劑,通過降低溶液的表面張力,從而增大體系中的傳熱傳質速率;物理方法有攪拌、噴霧、鼓泡等動態手段或者靜態冰粉強化等技術加強傳熱傳質速率。
2986
能源阿陽 ??? 3年前
電化學儲能基本問題綜述 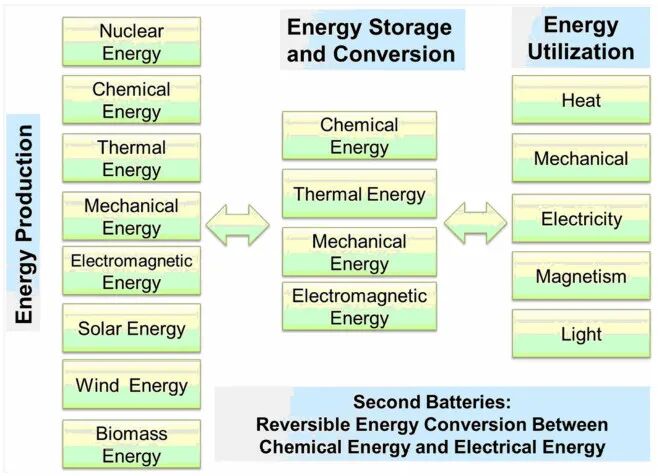
圖4 鋰電池中8種可逆儲鋰機制圖示對于一個電化學反應體系而言,熱力學上都應該是可逆的。但從動力學考慮,一些反應的逆反應很難發生,這就導致有些電化學體系不能充電或者難以高度可逆的充放電。形成了不能充放電的一次電池和可以充放電的二次電池(亦稱可充放電池、蓄電池)。
3453
能源阿陽 ??? 3年前
Science:利用光催化鹵原子轉移和基團轉移化學實現去官能團化過程 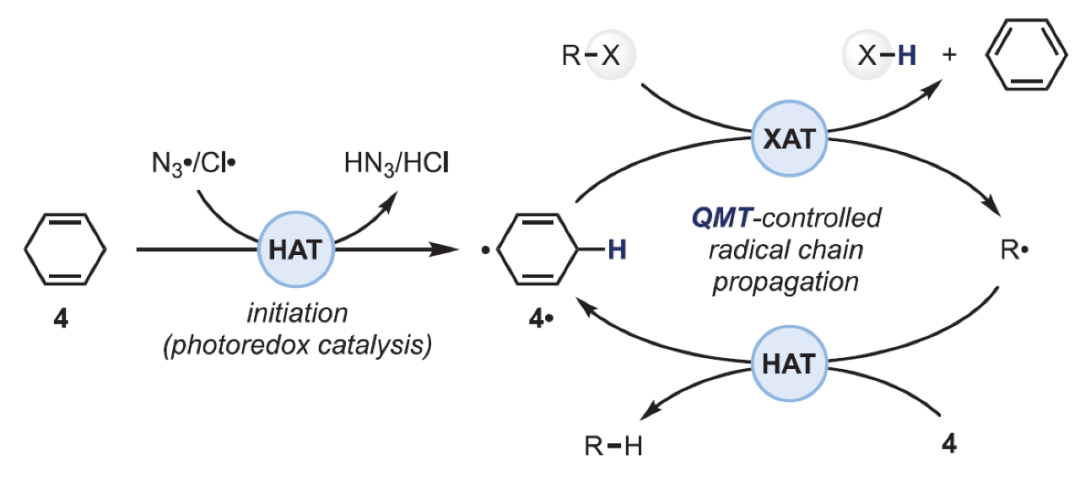
然而,計算結果表明生成H?需要 > 15 Kcal mol-1的能量,具有很高的動力學障礙,這與作者在合成實驗中觀察到的快速反應性并不一致(Fig. 3B, part i)。以上實驗結果表明,此反應應該會有一個不同的反應途徑。
3950
化工加 ??? 3年前
【JY】代碼|極簡反應譜分析 
有你關注所以值得【摘要】 分享Matlab源代碼核心10行代碼計算完整各類反應譜分析!
2374 2 3
建源之光 - 減隔震 ??? 3年前
20條/頁 
 51
51 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
