



FRED應(yīng)用:離軸拋物面反射鏡創(chuàng)建 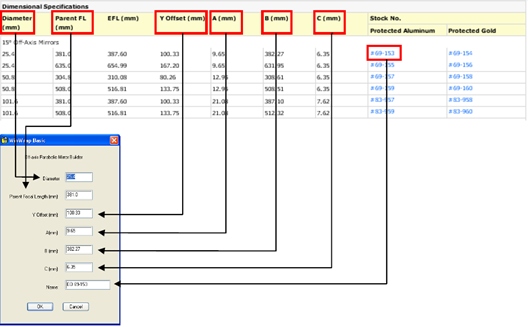
如以下目錄所示,考慮選取15°離軸反射鏡,輸入相應(yīng)的值到腳本生成對(duì)話框中。 默認(rèn)情況下,腳本使反射鏡面的中心位于原點(diǎn)位置。這個(gè)定位可能是也可能不是理想的位置,自定義元素節(jié)點(diǎn)應(yīng)該按照要求可以平移。在本文附帶的*frd文件中OAP“EO 83-973”發(fā)生了平移,因此反射鏡面匹配相應(yīng)的基準(zhǔn)拋物線部分。在這個(gè)配置中,離軸拋物面的焦點(diǎn)位置與基準(zhǔn)拋物面的焦點(diǎn)位置相同。
2200
追光ing ??? 1年前
生產(chǎn)制造 | NCSIMUL破解平旋盤(pán)(U軸車(chē)削)仿真難題 
平旋盤(pán)(U軸)技術(shù)正扮演著越來(lái)越關(guān)鍵的角色。數(shù)控平旋盤(pán)和可變徑鏜頭可在加工過(guò)程中實(shí)時(shí)數(shù)控改變切削直徑,極大地提升了復(fù)雜零件的加工效率與精度。與普通鏜刀不同,這種刀具通過(guò)數(shù)控程序?qū)㈢M桿的伸縮通過(guò)平旋盤(pán)內(nèi)的精密機(jī)構(gòu)轉(zhuǎn)換為刀具的水平位移,從而實(shí)現(xiàn)切削直徑的實(shí)時(shí)調(diào)整。
2853 1 1
海克斯康設(shè)計(jì)與仿真 ??? 6月前
FRED應(yīng)用:離軸拋物面反射鏡創(chuàng)建 
這個(gè)定位可能是也可能不是理想的位置,自定義元素節(jié)點(diǎn)應(yīng)該按照要求可以平移。在本文附帶的*frd文件中OAP“EO 83-973”發(fā)生了平移,因此反射鏡面匹配相應(yīng)的基準(zhǔn)拋物線部分。
653
追光ing ??? 18天前
航空行業(yè)標(biāo)桿案例 | 極致公差賦予您安全、舒適的飛行體驗(yàn) 
解決思路:應(yīng)用3DCC建立復(fù)雜幾何尺寸鏈計(jì)算模型,通過(guò)虛擬裝配仿真分析孔軸傾斜、定位誤差及累積公差影響,精準(zhǔn)評(píng)估平移機(jī)構(gòu)在不同裝配公差組合下的運(yùn)動(dòng)特性。以此來(lái)優(yōu)化關(guān)鍵公差參數(shù),確保內(nèi)飾平移機(jī)構(gòu)的裝配精度與長(zhǎng)期可靠性。2、大型飛機(jī)轉(zhuǎn)軸同軸度計(jì)算場(chǎng)景描述:飛機(jī)起落架、發(fā)動(dòng)機(jī)推力反向器等組件常涉及“一軸穿多孔”的裝配,其同軸度要求極高。
2433
笑酒仙 ??? 1年前
MSC Apex如何快速進(jìn)行模型裝配 
? 幾何變換可以利用下圖中的下拉菜單來(lái)切換平移或者旋轉(zhuǎn),也可以利用鍵盤(pán)的T鍵和R鍵來(lái)進(jìn)行切換。 ? 選擇旋轉(zhuǎn)復(fù)制,旋轉(zhuǎn)某一個(gè)圓環(huán),代表圍繞某一個(gè)坐標(biāo)軸進(jìn)行旋轉(zhuǎn),可以輸入旋轉(zhuǎn)的角度,也可以之間利用鼠標(biāo)拖拽的方式進(jìn)行旋轉(zhuǎn)復(fù)制,依次進(jìn)行旋轉(zhuǎn)復(fù)制。
2145
Cruise ??? 3年前
案例57-輪胎性能模擬 
外傾角是從輪胎前部看,車(chē)輪中心線與道路垂直線之間的角度: 在足跡分析之后,進(jìn)行了一些穩(wěn)態(tài)滾動(dòng)分析,以確定各種穩(wěn)態(tài)滾動(dòng)解(包括固定平移速度的自由滾動(dòng)、制動(dòng)和牽引)。在第一次穩(wěn)態(tài)滾動(dòng)分析中,應(yīng)用平移速度和旋轉(zhuǎn)速度,以使輪胎處于制動(dòng)狀態(tài): 對(duì)于給定的平移速度,沿輪胎運(yùn)行方向沒(méi)有縱向力或沒(méi)有扭矩作用在輪胎上的旋轉(zhuǎn)稱為自由滾動(dòng)旋轉(zhuǎn)。
4304 12 6
龍飛宇 ??? 3年前
算例精選STAR-CCM+模擬船航行|DFBI:頂頭波中的船 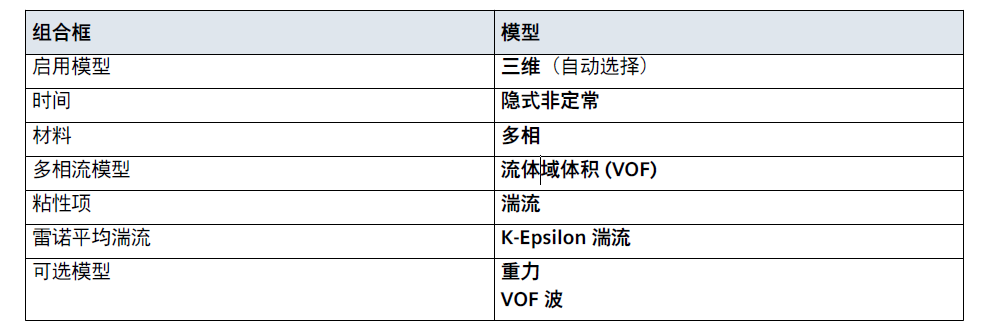
右鍵單擊報(bào)告節(jié)點(diǎn),然后選擇新報(bào)告 > DFBI > 6 自由度體平移。一個(gè)名稱為 6 自由度體平移 1 的節(jié)點(diǎn)出現(xiàn)在報(bào)告節(jié)點(diǎn)內(nèi)。2. 將 6 自由度體平移 1 節(jié)點(diǎn)重命名為 Z 軸向平移3. 選擇 Z 軸向平移節(jié)點(diǎn),然后將方向設(shè)置為 [0.0, 0.0, 1.0]。創(chuàng)建第二個(gè)報(bào)告以監(jiān)視圍繞 Y 軸的旋轉(zhuǎn)角度。4.
6234 4
仿真客 ??? 3年前
溫度及應(yīng)變率相關(guān)超黏彈性本構(gòu)的建立、推導(dǎo)、參數(shù)識(shí)別與有限元應(yīng)用 

在時(shí)溫等效章節(jié)中,介紹了時(shí)溫等效、平移函數(shù)、平移因子、Williams-Landel-Ferry時(shí)溫等效方程(WLF方程)的定義,提供了基于Python語(yǔ)言的最小化誤差函數(shù)算法獲取平移因子的方法和程序。
5386 2
去看見(jiàn)星空和大海 ??? 7月前
基于DeltaD打印機(jī)的剛?cè)狁詈线\(yùn)動(dòng)學(xué)分析 
由坐標(biāo)變換關(guān)系可知,相鄰量坐標(biāo)之間可通過(guò)4個(gè)齊次坐標(biāo)變換進(jìn)行描述,關(guān)系表達(dá)式為:通過(guò)計(jì)算最終可得其表達(dá)式為:綜合上式得出運(yùn)動(dòng)方程為:其中:k表示坐標(biāo)系的編號(hào),c和s分別代表cos和sin的縮寫(xiě);Ttz為坐標(biāo)系k沿Zk軸平移距離bk,使Xk和Xk+1軸相交;Trz為坐標(biāo)系k的Xk軸繞Zk軸旋轉(zhuǎn)θk,使Xk軸和Xk+1軸共線;Ttx為坐標(biāo)系k沿Xk+1軸平移距離ak,
4397 3
擺渡人張 ??? 2年前
康謀技術(shù) | 深入探討:自動(dòng)駕駛中的相機(jī)標(biāo)定技術(shù) 
dx,dy分別表示在x和y軸方向上一個(gè)像素占據(jù)的實(shí)際長(zhǎng)度,r 表示徑向畸變參數(shù)之一,f 表示焦距,v0,u0 表示像素坐標(biāo)下的主坐標(biāo)點(diǎn)。</p><p>? 外參描述了攝像頭在世界坐標(biāo)系中的位置和方向,包括旋轉(zhuǎn)角度和平移參數(shù),它說(shuō)明了現(xiàn)實(shí)世界點(diǎn)是如何通過(guò)平移和旋轉(zhuǎn)映射到攝像頭坐標(biāo)系的。其中,R 為旋轉(zhuǎn)矩陣,負(fù)責(zé)實(shí)現(xiàn)坐標(biāo)系之間的旋轉(zhuǎn)變換。T 為平移矩陣,負(fù)責(zé)實(shí)現(xiàn)坐標(biāo)系之間的平移變換。
2480
康謀keymotek ??? 2年前
定向井技術(shù)基礎(chǔ) 
6)視平移:(Vertical Section)是井身上某點(diǎn)在某一垂直投影面上的水平位移,它不是真實(shí)的水平位移,所以稱之為視平移。AA為閉合位移,VA為視平移。視平移與水平位移越接近,說(shuō)明井眼方位控制的越好。水平位移都是正值,而視平移可能是正值,也可能是負(fù)值。負(fù)值的視平移說(shuō)明閉合方位線與設(shè)計(jì)方位線的差值已大于90度,這種情況常出現(xiàn)于造斜前的直井段。
5312 1
化工活動(dòng)家 ??? 3年前
離心式壓縮機(jī)仿真案例 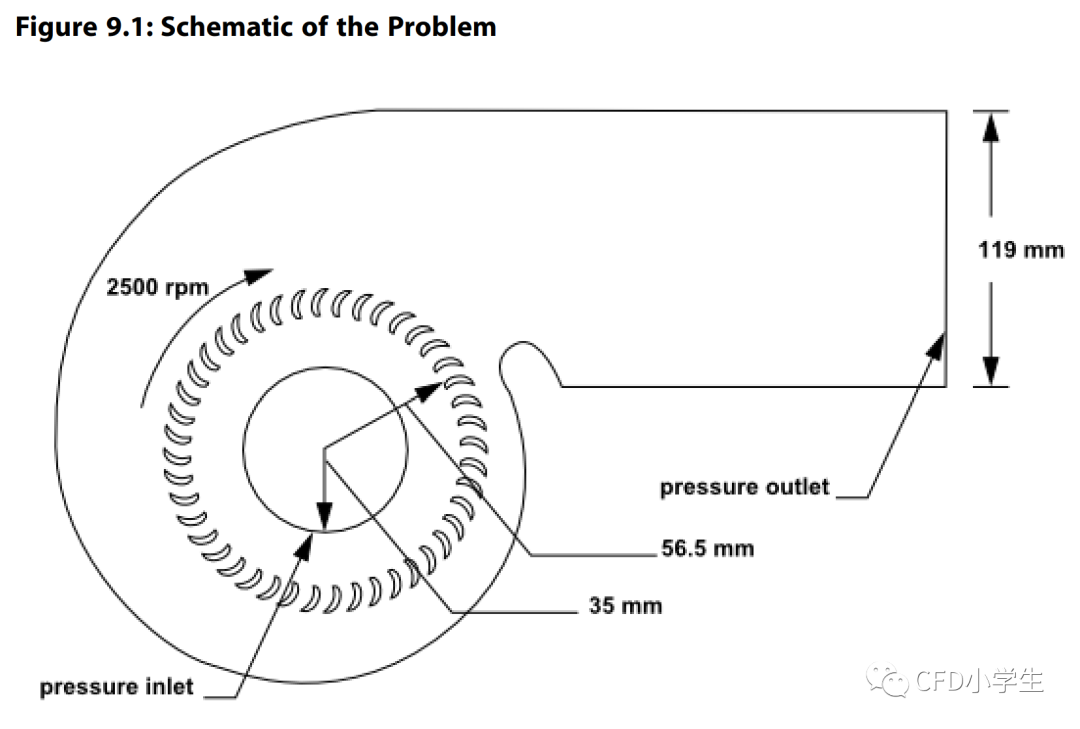
在該位置的流場(chǎng)是獨(dú)立于移動(dòng)部件的方向的,這就意味著如果交界面能夠被繪制(drawn)以具有很小或者沒(méi)有角度依賴性(little or no angular dependence),MRF模型能夠成為可靠的工具用于時(shí)均流場(chǎng)的求解(time-averaged flow fields);二、多參坐標(biāo)系(MRF模型)理論摘要1、Overview;MRF模型為穩(wěn)態(tài)近似的方法,能夠在獨(dú)立的計(jì)算域內(nèi)賦予不同的旋轉(zhuǎn)或平移速度
2786 2 1
我愛(ài)汽輪機(jī)仿真 ??? 2年前
FRED:平凸透鏡球差分析 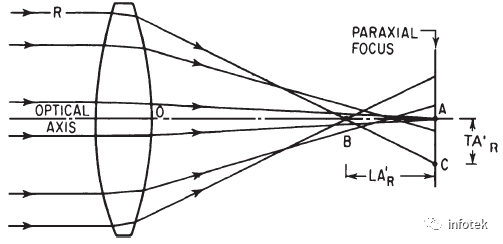
1、 追跡光線2、 點(diǎn)擊analyses/ Best geometric focus3、 生成報(bào)告在Z方向最佳幾何焦點(diǎn)位置為45.689443,建立探測(cè)平面及分析面注意此時(shí)的沿著Z方向的平移值即為最佳幾何焦點(diǎn)位置值。
2338
追光ing ??? 10月前
尺寸鏈計(jì)算——孔軸裝配誤差 
下面我們通過(guò)一個(gè)案例進(jìn)行分析,如下圖所示,零件A和零件B通過(guò)孔軸裝配后,計(jì)算左側(cè)位置兩零件的間隙大小,分析是否發(fā)生干涉(不考慮旋轉(zhuǎn)誤差,只考慮平移方向誤差,分析在自由浮動(dòng)以及徑向受力兩種情況) 其中孔尺寸大于軸尺寸,孔軸之間存在間隙,下面通過(guò)3DCC軟件對(duì)兩種情況進(jìn)行分析。
4801 2
笑酒仙 ??? 3年前
在 COMSOL 中模擬電動(dòng)磁懸浮裝置 
如果圓周速度大于平移速度(相對(duì)滑移速度為正),則系統(tǒng)產(chǎn)生推力。若情況相反,則產(chǎn)生制動(dòng)力。 通過(guò)使用二維和三維的“旋轉(zhuǎn)機(jī)械,磁”接口,我們可以在一個(gè)模型中同時(shí)模擬平移和旋轉(zhuǎn)運(yùn)動(dòng)。
3587 2 2
我是小能 ??? 3年前
【技術(shù)熱點(diǎn)】三維五軸激光在熱沖壓成形應(yīng)用上的工藝提升 
C軸 較多平直面 較多異形面B軸/C軸 較少平直面 板料厚度 [mm] 1.2 mm & 1.5 mm
3719
熱成形產(chǎn)業(yè)聯(lián)盟 ??? 2年前
RecurDyn建模常見(jiàn)問(wèn)題:約束(Joint) 
此時(shí)可以確認(rèn)創(chuàng)建連接副時(shí)一起創(chuàng)建的marker的Z軸(黃色)。1. 對(duì)于旋轉(zhuǎn)連接副,根據(jù)+Z軸的基準(zhǔn),使用右手定律可以確認(rèn)+旋轉(zhuǎn)方向。當(dāng)Z軸在右手拇指方向時(shí),手指纏繞的方向就是+旋轉(zhuǎn)方向。2. 對(duì)于平移連接副,+Z軸的方向就是+方向。這同樣適用于圓柱形連接副。文章來(lái)源RecurDyn軟件
2610 7 5
仿真客 ??? 3年前
008. 淺析有限元分析中自由度的概念 
這是因?yàn)樵谌S空間中,質(zhì)點(diǎn)可以沿著三個(gè)彼此垂直的坐標(biāo)軸(通常是x、y和z軸)移動(dòng)。空間中的剛體有六個(gè)自由度。這是因?yàn)橐粋€(gè)剛體在三維空間中可以進(jìn)行平移運(yùn)動(dòng)(沿x、y、z軸方向),同時(shí)還可以繞這三個(gè)軸進(jìn)行轉(zhuǎn)動(dòng)。假設(shè)A點(diǎn)位于某條線上,則A點(diǎn)有幾個(gè)自由度?假設(shè)A點(diǎn)位于某條線上,除了可以在該線上進(jìn)行平移運(yùn)動(dòng)外,還可以繞該線旋轉(zhuǎn)。
2694
CAE知識(shí)手札 ??? 2年前
曠達(dá) | 汽車(chē)內(nèi)飾面料產(chǎn)品的先進(jìn)制造工藝探討 
3.電子橫移高速經(jīng)編織造技術(shù) 隨著經(jīng)編機(jī)制造技術(shù)的發(fā)展,電子橫移機(jī)構(gòu)逐漸取代了采用花盤(pán)、鏈塊的機(jī)械式橫移機(jī)構(gòu)。電子橫移高速經(jīng)編織造技術(shù)可以實(shí)現(xiàn)花型的自由更換,方便快捷,可以突破花型循壞的限制,在高速條件下穩(wěn)定運(yùn)行,這些都是具有機(jī)械式橫移機(jī)構(gòu)的經(jīng)編機(jī)所無(wú)法實(shí)現(xiàn)的。
2968
年輕態(tài) ??? 4年前
Moldex3D模流分析之編輯物件 
平移 (Move):選擇對(duì)象再利用參考點(diǎn)及終點(diǎn)的相對(duì)位置來(lái)移動(dòng)。 ?點(diǎn)擊平移,再選擇要移動(dòng)的對(duì)象(或先選取在點(diǎn)擊)。 ?在顯示窗口選擇兩點(diǎn)做參考,來(lái)決定平移的方向及距離 復(fù)制 (Copy):選擇對(duì)象再利用參考點(diǎn)及終點(diǎn)的相對(duì)位置來(lái)復(fù)制。 ?點(diǎn)擊復(fù)制,再選擇要復(fù)制的對(duì)象(或先選取在點(diǎn)擊)。
2582 1
Moldex3D 中國(guó) ??? 2年前
20條/頁(yè) 
 20
20 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
