



ZEMAX軟件技術應用專題:利用Kogelnik方法模擬體積全像光柵的繞射效率 
然而,為了準確地說明體積全像的特性,除了考慮繞射光線的傳播方向外,還必須考慮繞射效率、材料收縮或折射率變化等因素。考慮繞射效率使用戶能夠進行圖像模擬和綜合優化等高級分析。表面反射光柵與體積全像光柵的比較在介紹這個模型之前,我們先簡單解釋一下表面反射光柵(SRG)和體積全像光柵(VHG)的區別。
2123
w**elab86_Swsp ??? 3年前
基于Simdroid-EC的油冷變壓器自然冷卻熱仿真 
圖5 復制建立散熱片熱模型6)為了精確捕捉翅片內油的流動,使用拖拽創建功能,在翅片內油側空間建立體積區域,并對其設置網格參數(體積區域厚度方向至少劃分3層網格);同理對上下油箱的寬、高方向設置合理的網格個數或者網格尺寸。
2667 1 1
仿真APP ??? 1年前
UG NX圖文小練習—彎管底座(UG草圖平面為異向面時,方向處理) 
起點利用點偏置z向距離為6,終點使用成一定角度,根據方向設置正負,終止使用z軸來截斷 回轉,直線繞z軸選擇,開始和結束任意覆蓋底座范圍即可,添加偏置求差 鏡像幾何體,將半體鏡像 求和
3910
張偉一 ??? 3年前
行業分享丨SimSolid 在汽車零部件開發中應用的可行性調研及實踐 
典型的拖拽結構一般由型鋼及鋼板焊接而成,中間位置設計了安裝球型拖鉤的方管結構,兩端是固定到車輛上的安裝板,如圖2所示。由于不同車輛拖拽能力及尾部造型差異,導致拖拽結構的具體設計靈活多變,各不相同,因此,需要一種高效的性能分析工具,支持工程師完成拖拽設計,滿足車輛的總體要求。
2198 1 1
技術鄰公告 ??? 4月前
技術干貨丨SimSolid在汽車零部件開發中的應用實踐
典型的拖拽結構一般由型鋼及鋼板焊接而成,中間位置設計了安裝球型拖鉤的方管結構,兩端是固定到車輛上的安裝板,如圖2所示。由于不同車輛拖拽能力及尾部造型差異,導致拖拽結構的具體設計靈活多變,各不相同,因此,需要一種高效的性能分析工具,支持工程師完成拖拽設計,滿足車輛的總體要求。
2080 1 1
ALTAIR ??? 4月前
ZEMAX軟件技術應用專題:如何使用ZOS-API創建飛行時間用戶分析 
圖元的位置可表明入射光的方向。這兩個值都表明散射光線來自站在離貨車10米遠的紅色行人。OpticStudio實際上測量的不是時間,而是光線路徑長度,也就是物體和探測器之間的距離。探測器檢視器(Detector Viewer)可以顯示探測器上輻射特性的測量結果,但它不顯示從雷射雷達光源返回到雷射雷達探測器的光線經過的距離。這就是ZOS-API派上用場的時候!
2080
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術應用專題:用於數位元投影光學中均勻照明的陣列透鏡 (蒼蠅眼) 
提供的範例,選擇了 Lenslet Array 1 物件, 它由矩形體陣列組成,每個矩形體的前表面為平面,後表面為使用者自訂數目的重複曲面。後表面可以是平面、球面、圓錐面、多項式非球面或環形表面。這使得陣列中透鏡元件表面形狀的定義和優化具有了極大的靈活性。下圖顯示了透鏡陣列1物體,它是由7 x 5個矩形透鏡組成的透鏡陣列,每個矩形透鏡都可以看作一個球面透鏡的矩形區域。
2002
w**elab86_Swsp ??? 3年前
模具設計之分型面的選擇,實用的資料! 
因此選擇分型面時應把抽芯距長的方向選擇在前后模開合的方向上,將短的方向做為側向分型。7:鎖模力的考慮 模具的側向鎖模力相對來說比較小,所以對于投影面積較大的大型產品,應將投影面積大的方向放在前后模開合模方向上,而將側投影面積較小的作為側向分型。8:利于排氣 當把分型面做為主要排氣時,應該把分型面設計在塑料流動的末端,以利于排氣。
4401 2
UG模具設計-UG數控編程徐老師 ??? 3年前
ANSYS ACP復合材料鋪層固定機翼蒙皮肋筋仿真,附講解視頻及模型文件 
o 對于機翼蒙皮和肋板等復雜結構,需將蒙皮和肋板分割為獨立的面或體,以便后續定義接觸關系和鋪層順序。在接觸區域(如蒙皮與肋板的連接處),需進行精確的幾何分割,確保接觸面清晰且邊界明確。o 為了便于共節點識別或接觸定義,可在接觸區域生成輔助線或面,確保網格劃分時節點對齊,避免因網格不匹配導致計算錯誤。
2.2 材料定義1.
6424 38 13
孫一凡仿真 ??? 1年前
管道的熱固耦合計算及管道熱應力分析! 
Y 軸負方向。
6018 8 3
寶怡 ??? 2年前
塑膠件的結構設計:分型面(線)篇 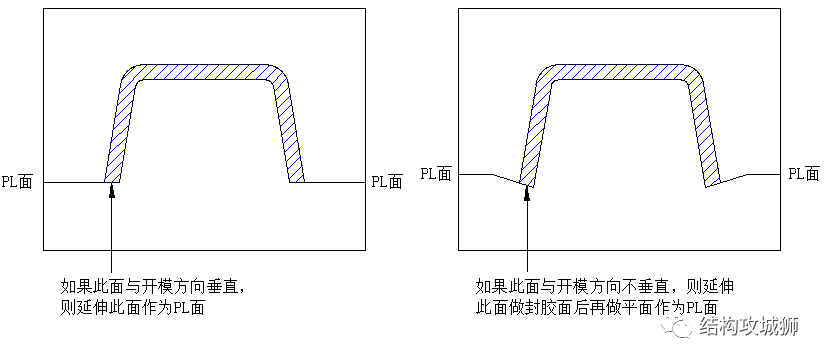
02 分型面的種類我們一般把塑件件外形最大輪廓處的分型面稱為主分型面,其他的為輔助分型面。分型面的形式1、平面分型面:平面分型面是比較常見的、簡單的,它是一個垂直于開模方向的平面,如下圖所示。2、階梯分型面:根據一些塑件的具體情況,將分型面做成階梯狀,如下圖所示。
11175 1
結構攻城獅 ??? 3年前
Moldex3D模流分析之創建物件 
在定義投射方向時,正向投射會自動取得與投射面垂直的方向,而平行投射則需要使用者另外選定兩點決定方向。 -偏移曲線 (Offset Curve on Surface):將對象上的邊或被投射的曲線偏移并產生一新曲線。 -擠出 (Extrude):選擇一對象的面或者成封閉環狀的曲線來將只擠出成多面體。選擇兩點來決定擠出的方向與長度,選項加蓋(實體)為默認值會使擠出成果為多面體而非環狀面。
2281
Moldex3D 中國 ??? 2年前
【Lumerical系列】無源器件-端面耦合器1丨綜述 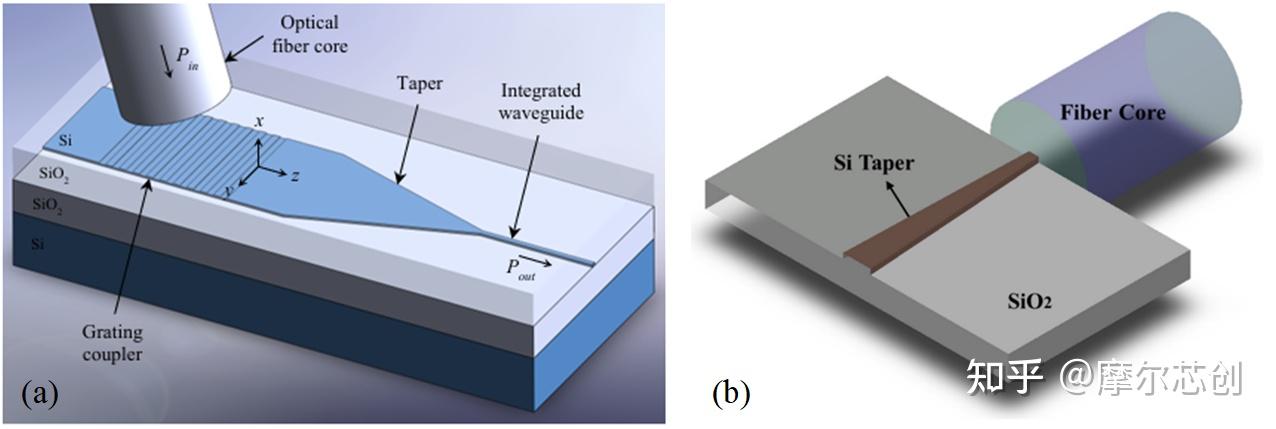
圖4 基于亞波長光柵的端面耦合器端面耦合器在垂直方向上的結構變換1. 多個波導輔助的端面耦合器圖5是在倒錐形上方放置多個波導以獲得較大模態面積的方法。上方波導通常由折射率低于硅的材料制成,如氮化硅和氮氧化硅。下方的倒錐形波導與上方輔助波導支持疊加模式,使得模式區域變大并于光纖纖芯的模式區域相當,有助于更高效與光纖發出的光進行耦合。
2509
摩爾芯創 ??? 4月前
Star CCM+案例—對稱鈍狀體的跨聲速風洞流場-02 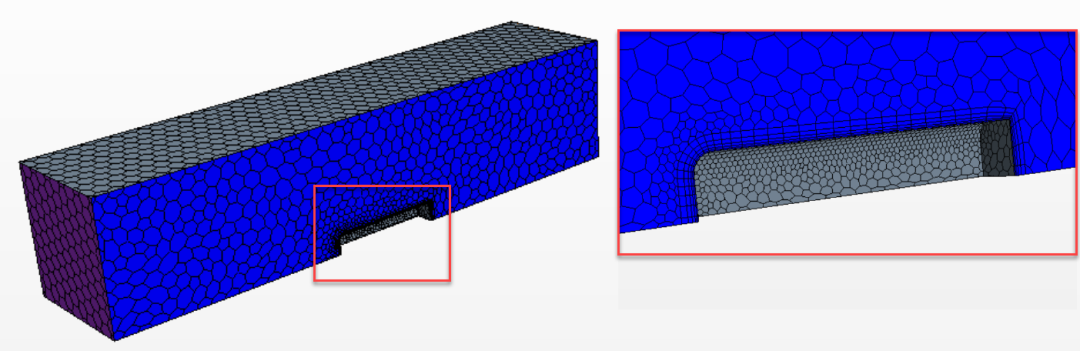
; ? 設置Parts為Inner_wall,即內壁面邊界; ? 或者可通過將Regions_bluntBody_Boundaries_下的Inner_wall拖拽到Reports下的Force Coefficient 1中; ? 通過選中剛創建的Force Coefficient
5908 1 1
乘風破浪_ ??? 2年前
某底盤熱仿真設計方案案例分享 
;Transient setup的Solution initialization選項中,輸入重力方向反方向的速度0.15m/s。
3080 4 1
仿真客 ??? 3年前
【Lumerical系列】無源器件-端面耦合器1丨綜述
圖4 基于亞波長光柵的端面耦合器端面耦合器在垂直方向上的結構變換1. 多個波導輔助的端面耦合器圖5是在倒錐形上方放置多個波導以獲得較大模態面積的方法。上方波導通常由折射率低于硅的材料制成,如氮化硅和氮氧化硅。下方的倒錐形波導與上方輔助波導支持疊加模式,使得模式區域變大并于光纖纖芯的模式區域相當,有助于更高效與光纖發出的光進行耦合。
2300
摩爾芯創 ??? 4月前
條形鑄鐵平臺的“骨科體檢”:從墊鐵到灌漿,全套正骨流程 
墊鐵間距一般不超過800-1000mm,且必和須保證每個支撐點受力均勻受力要求:所有墊鐵均與平臺底面和基礎面接觸,用手錘輕敲檢查,聲音應堅實,無空洞感3. 初步找平使用普通水平尺,大致調整各墊鐵高度,使平臺初步水平。三、精和密調平(核心環節)1. 建立測量基準將高精度水平儀放在平臺中央位置,沿長度方向和寬度方向分別測量。2.
1374
威岳13780573715 ??? 2月前
Ansys | 環肋圓柱體的非線性屈曲分析 
固定底板的底面,并對頂板頂面施加位移。使其向下移動 6mm,并在平移方向移動1mm。11、運行仿真并查看結果。圓柱柱體的變形形狀如圖4所示。最大穩定化能量隨時間的值為1.9×1041.9×104mJ,僅占最大應變能6.1×1056.1×105 mJ的2.9%。反力-時間曲線(圖 5)顯示了峰值力的大小,該峰值對應于屈曲載荷。 圖 4.
761
JXKJ ??? 26天前
射出模具數字化設計與智能制造技術分析 
由上述可知,應先進行定板系統的激活工作,在設計工具中選擇增加模具組件,并依照標準件庫中的數據進行篩選,篩選出規格為“Z51/18×76/3.5/40”的澆口套加以設計,并使其被拖拽到模板中,通過分模面的功能將其裁剪成所需要的裝配尺寸。 除此之外,選擇設計工具中的澆筑系統,在型芯中進行分流道中心線的草稿繪制,此中心線應穿過坐標系“X、Y”軸的中心原點。
3936 2 1
ACMT協會 ??? 2年前
技術干貨 | 注塑件電磁網格劃分指南(HyperMesh+SimLab) 
? 5、基于FE Geometry修復缺失面將網格顯示模式切換為Topology后,使用以下兩個工具可快速補面:工具1:2D>Surface>Patch/Spline,拖拽自由邊即可快速補全簡單缺口。工具2:2D>Midmesh>Create Midedge + Repair/Fill。
3203 5 1
ALTAIR ??? 11月前
20條/頁 
 56
56 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
